KE-2070_2080 MS参数..pdf - 第46页
Rev.1.00c MS 参数 4-1.3. 操作 选择了 [ 偏差设定 (O )][ 激光偏差 ト( L )][ 激光偏差 (O )...] 之后,显示出下面的激光偏差设定画面 。 < 操作 ・1/1 2> 请同时按 Alt 键和 ↓ 键 。 显示出下面的一 览 。 (KE-2070) (KE-2080) 请选择设定对象贴装头。 ※ 不影响机器设置的 使用装置 的设 定 。 没有检查 ( 设定为不使用的 ) 装置也可 以选择 …
Rev.1.00c
MS 参数
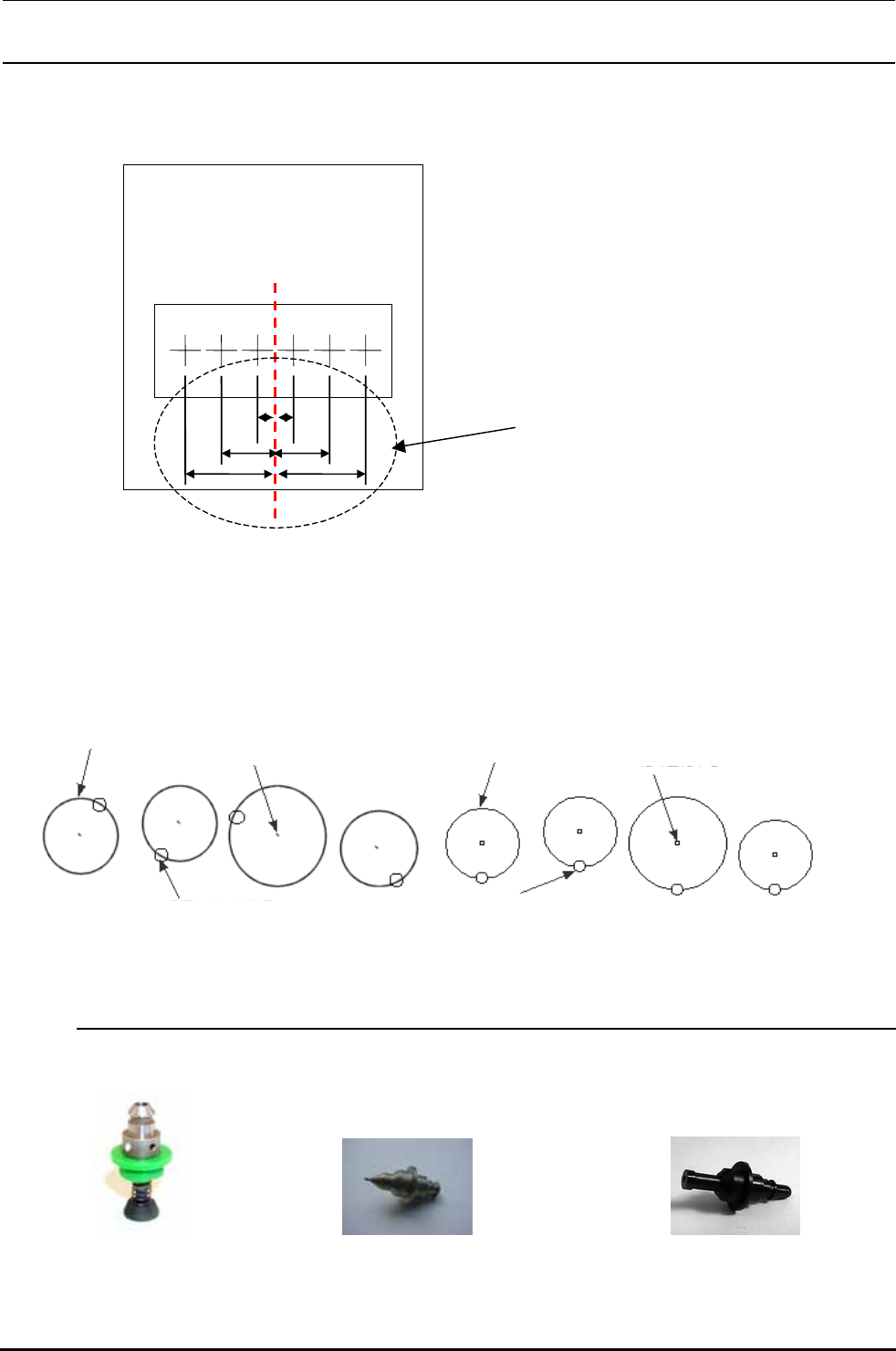
取得吸嘴旋转中心、各贴装头的轴旋转中心位置离激光传感器的偏离位置。
LNC60 贴装头
吸嘴旋转中心(L1∼L6)
角度偏差(只 LNC60 贴装头)因为要在轴转动方向调整所有的吸嘴,因此从轴的临时原点(θ 电动机
的 Z 相)来取得角度。
取得角度偏差之后,可以让各贴装头转动的偏斜朝向同一方向,可以提高同时吸附的精度。
附带说明,用 KE-2080 的右贴装头时没有吸嘴旋转中心、角度偏差的取得操作。
轴的转动轨迹
轴的转动中心
临时原点时的轴位置
轴位置
轴的转动中心
轴的转动轨迹
<取得角度偏差前的原点复位后情况> <取得角度偏差后的原点复位情况>
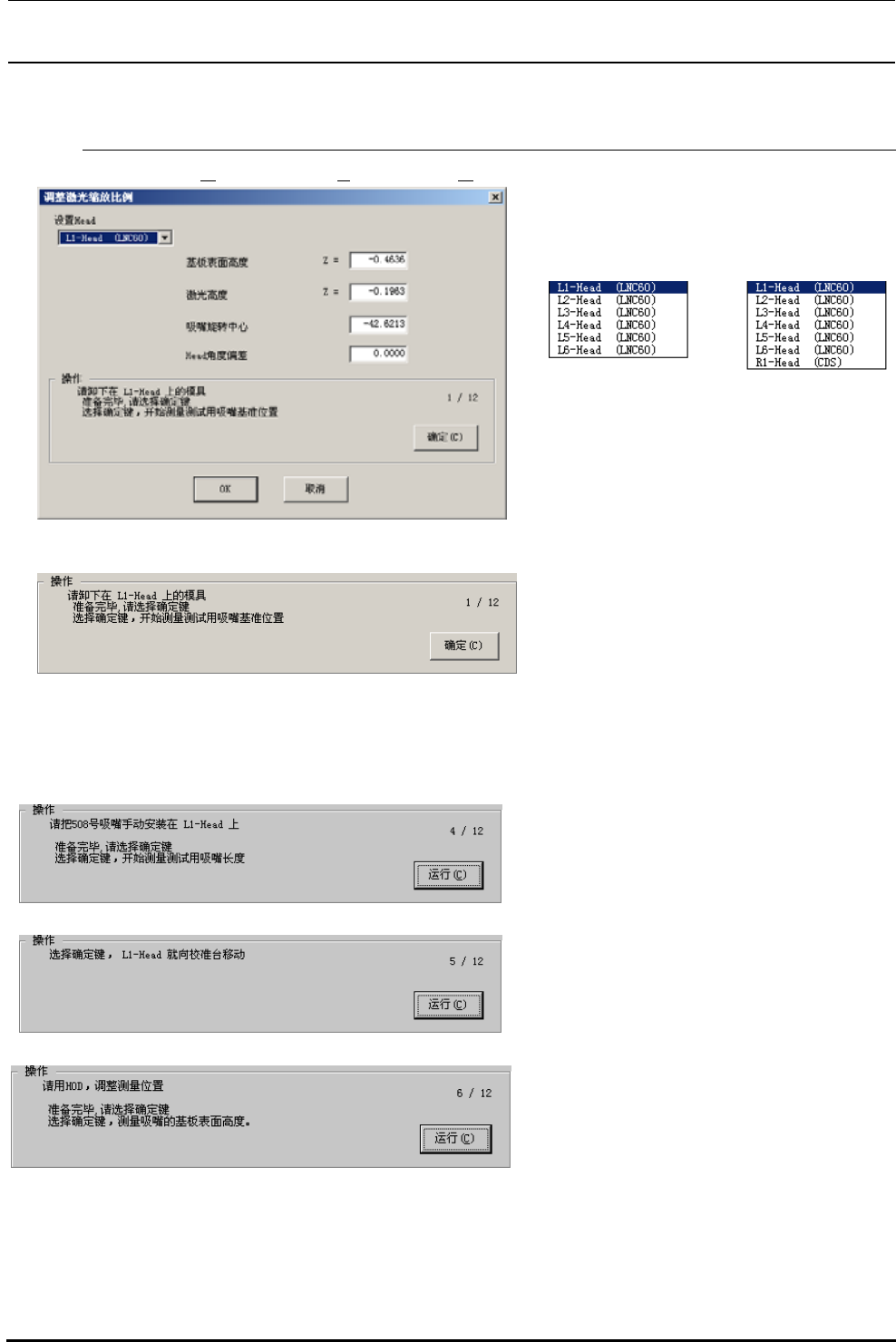
4-1.2. 使用治具
·508 吸嘴(40001346) ·治具吸嘴 LNC60 贴装头用 ·治具吸嘴 IC 贴装头用
(40046647) (E2101998000)
4-3
Rev.1.00c
MS 参数
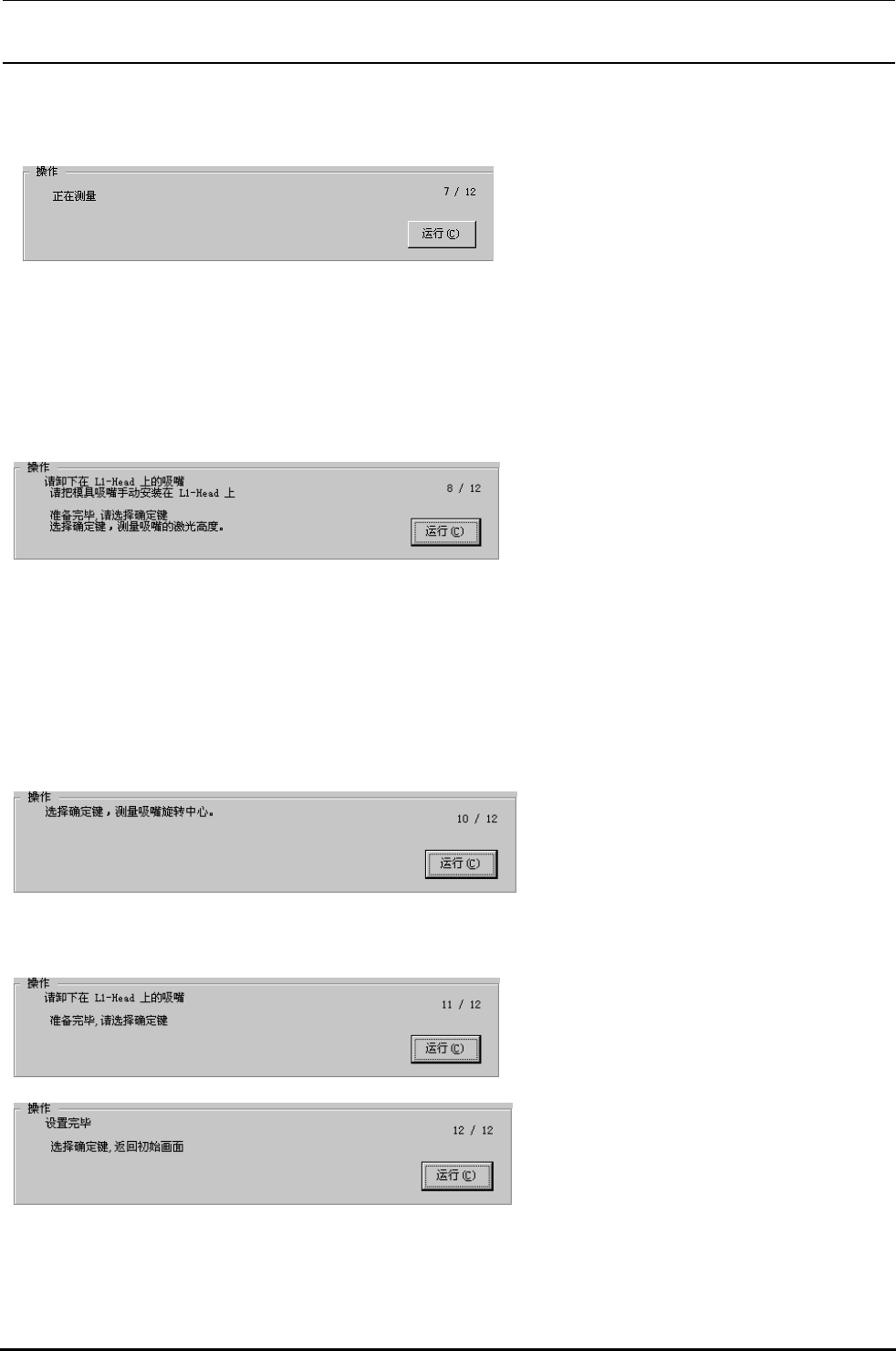
4-1.3. 操作
选择了[偏差设定(O)][激光偏差ト(L)][激光偏差(O)...]之后,显示出下面的激光偏差设定画面。
<操作・1/1 2>
请同时按 Alt 键和↓键。显示出下面的一
览。
(KE-2070) (KE-2080)
请选择设定对象贴装头。
※不影响机器设置的使用装置的设
定。没有检查(设定为不使用的)装置也可
以选择。
<操作・1/1 2 续>
从设定贴装头取下吸嘴。
准备完毕,请选择确定键。
选择确定键,检测吸嘴套的高度。
<操作・4/1 2>
请把 508 号吸嘴安装到设定贴装头。
准备完毕,请选择确定键。
选择确定键之后,测定吸嘴长度。
<操作・5/1 2>
请选择确定键。设定贴装头移动到 CAL
部。
<操作・6/12>
通过演示确认测定的贴装头的 508 吸嘴部
分在校准台的平部(无孔的位置)上。
4-4
Rev.1.00c
MS 参数
不需要调整时,不用演示。
准备完毕,请选择确定键。
选择确定之后,测定设定贴装头的基板上
面高度。
<操作・7/12>
自动测量开始。测量内容如下。
①打开贴装头的真空,读取真空值。此时,真空值-80Kpa 以下,为异常。请确认吸嘴。
②下降 Z 轴,测量真空-80Kpa 以下的位置。
③
计算②测定位置和测定用吸嘴的长度到基板上面的高度。
<操作・8/12>
从设定贴装头卸下吸嘴,设置治具吸嘴。
如果是
LNC 贴装头,请安装 LNC60 用
的治具吸嘴,如果是
IC 贴装头,则请安
装
IC 贴装头用的治具吸嘴。
准备完毕,请按确定键。
选择确定键之后,测定激光测定高度。
测定完毕后,从测定结果计算出激光高度
偏差。
<操作・10/12>
选择确定之后,用激光测定设定贴装头的
吸嘴旋转中心。(
IC 贴装头无吸嘴回转中
心,所以没有这一操作)
开始自动测定。
测定完毕,由测定结果计算出吸嘴旋转中
心。
<操作・11/12>
请从设定贴装头取下吸嘴。准备完毕,请
选择确定键。
<操作・12/12>
结束设定。
选择了确定键、返回初始画面。
4-5