SP18 参考手册.pdf - 第102页
SP18P-L 参考手册 4.1 机器调整 Page 4-12 4.1.11 输出确认 确认调整时频繁使用的阀的状态,另外使其各自单独动作,并进行确认动作。 ∗ 命名显示每一比特在当前机器中使用的输出地 址的状态。 名称项目被反转显示时,表示该比特变为 ON (1) 。 4.1.12 轴信息 确认机器控制的全轴的当前位置和状态的信息。 < 项目说明 > a. ‘ 当前位置计数 ’ 用 mm 或者脉冲显示各轴的当前位置。 [ …
SP18P-L
参考手册
4.1
机器调整
Page 4-11
4.1.10
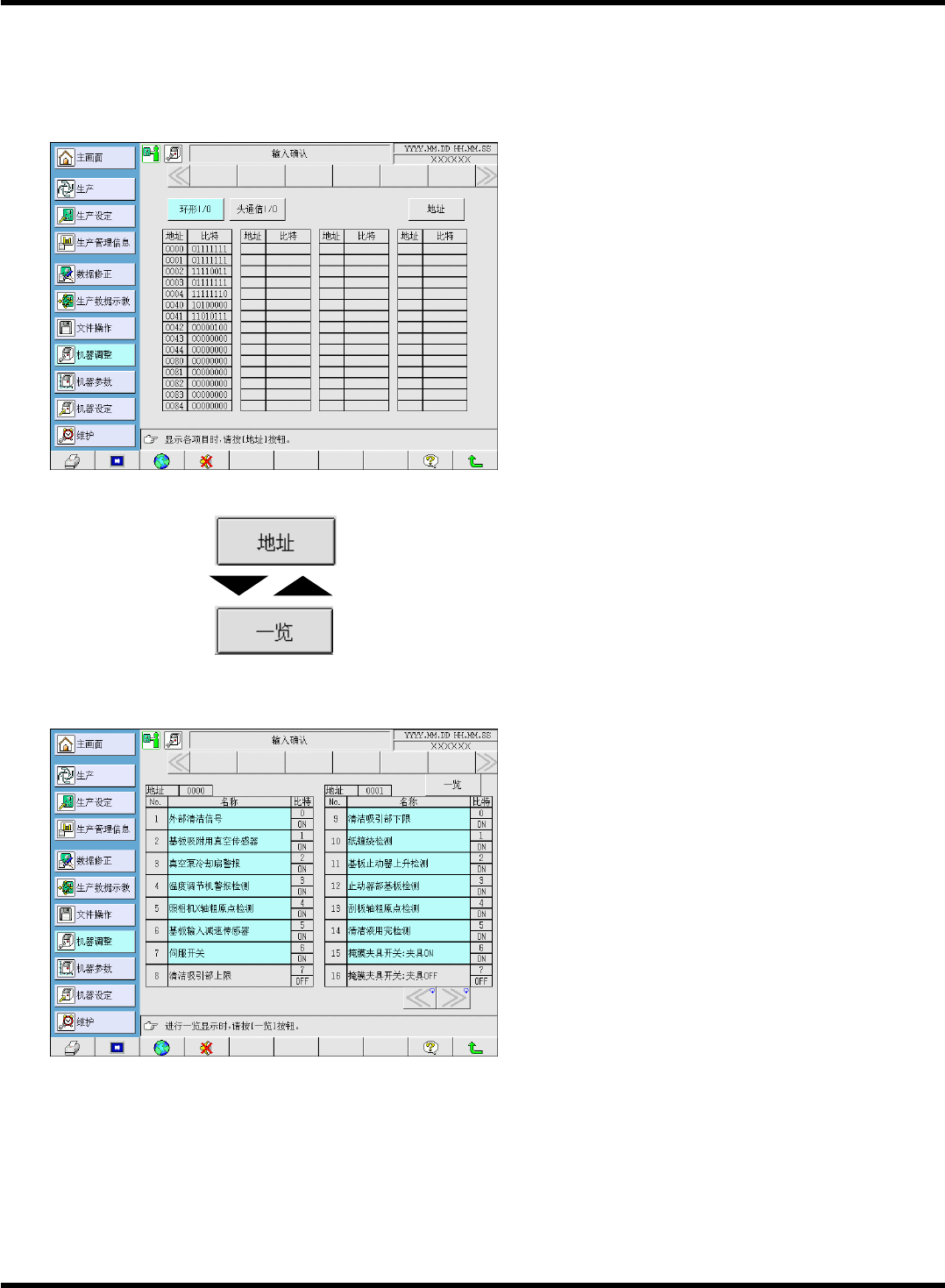
输入确认
每隔
1
秒钟对当前机器中使用的全部输入地址进行抽样,并用比特来显示该状态。
一览显示
∗
命名显示每一比特在当前机器中使用的输入地
址的状态。
名称项目被反转显示时,表示该比特变为
ON
(1)
。
每一地址的显示
EJP1A-Ma-0009
EJP1A-Ma-0010
EJP1A-C-RMA04-A01-00
SP18P-L
参考手册
4.1
机器调整
Page 4-12
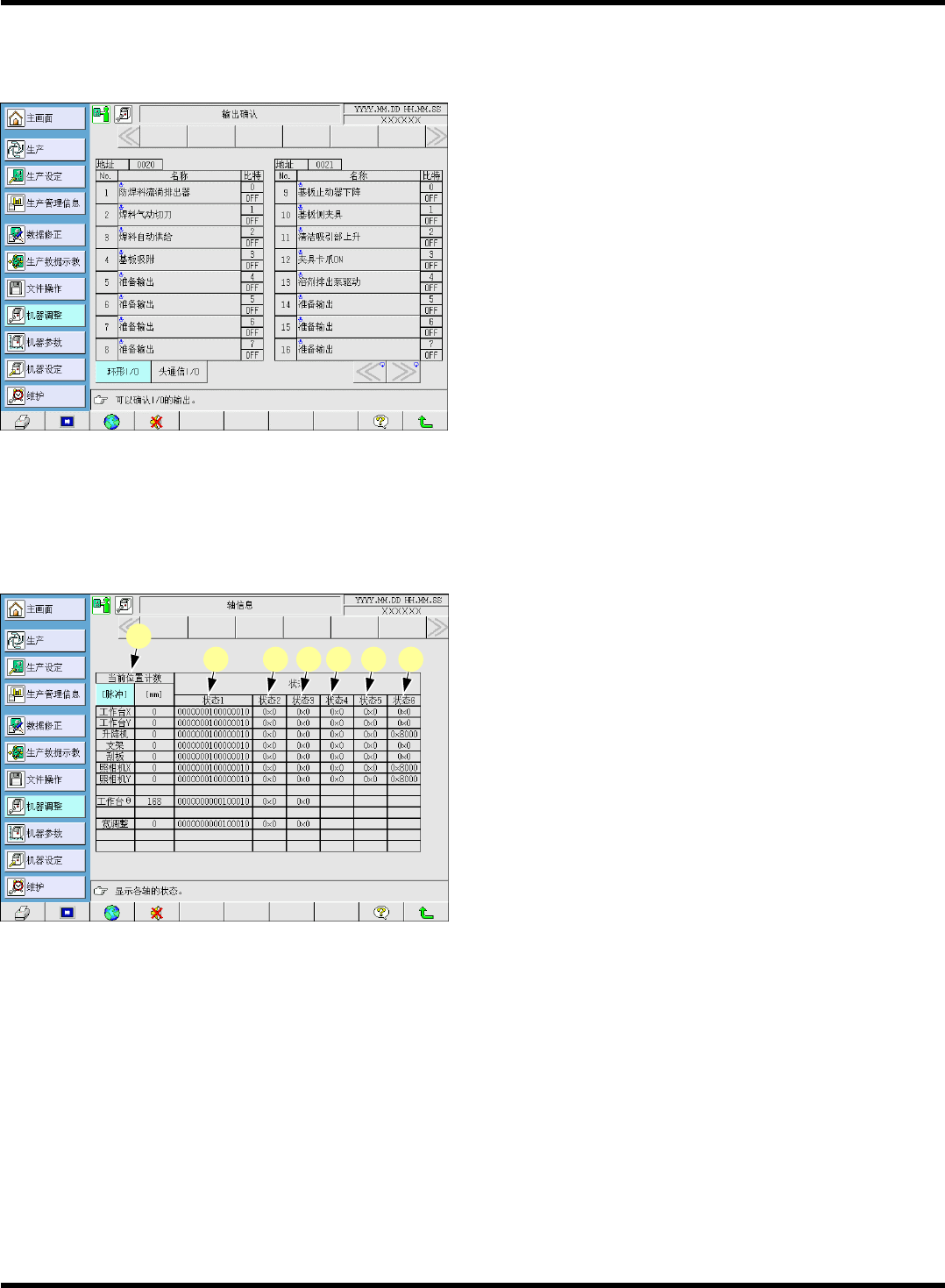
4.1.11
输出确认
确认调整时频繁使用的阀的状态,另外使其各自单独动作,并进行确认动作。
∗
命名显示每一比特在当前机器中使用的输出地
址的状态。
名称项目被反转显示时,表示该比特变为
ON
(1)
。
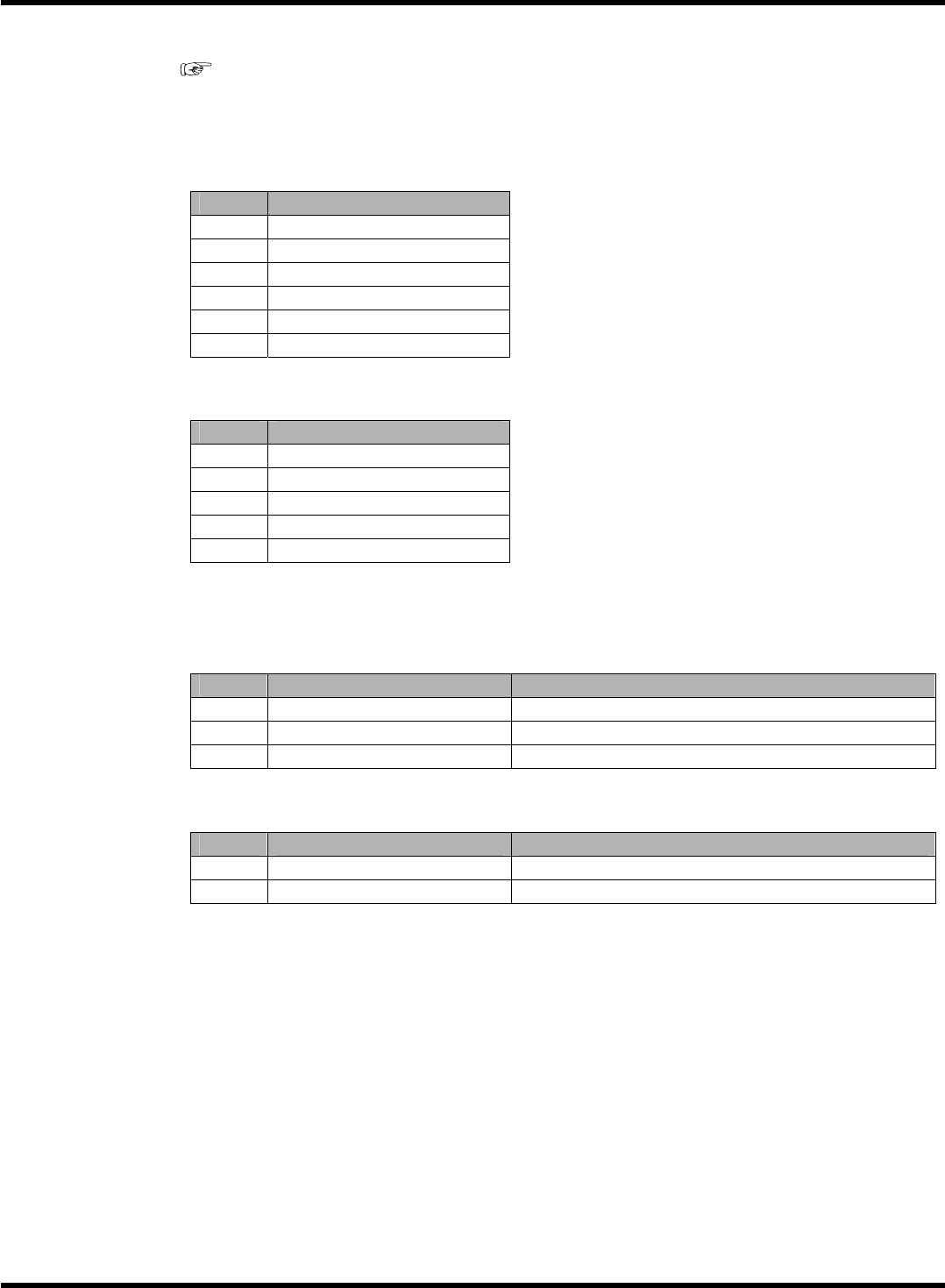
4.1.12
轴信息
确认机器控制的全轴的当前位置和状态的信息。
<
项目说明
>
a. ‘
当前位置计数
’
用
mm
或者脉冲显示各轴的当前位置。
[
脉冲
] :
用脉冲显示当前位置。
[mm] :
用
mm
显示当前位置。
b. ‘
状态
1’
显示各轴的传感器信息、与伺服驱动器可通信状
态等内容。
c. ‘
状态
2’
显示各轴的联锁信息、驱动器通信错误信息等内
容。
d. ‘
状态
3’
显示由伺服驱动器检测的错误信息。
e. ‘
状态
4’
设定超出设定范围的驱动器参数时将显示错误
信息。
f .‘
状态
5’
显示由伺服驱动器检测的警告信息。
g. ‘
状态
6’
显示伺服状态等事项。
右边的值为
“1”
时,处于伺服
OFF (
伺服自由
)
的
状态。
EJP1A-Ma-0011
EJP1A-C-RMA04-A01-00
EJP1A-Ma-0012
a
b c d e f
g
SP18P-L
参考手册
4.1
机器调整
Page 4-13
∗
状态表示的概略如下所示。
(
详细内容,请参照维修手册
(4.
错误对策
))
1)
状态 1
① 工作台
θ
、宽度调整
(
脉冲轴
)
的情况···各比特为
“1”
的情况。
比特 状态
0
错误发生中
2
原点复归完成
8
紧急停止中
10
原点复归异常
13
+极限
14
−极限
② 上述以外
(
伺服轴
)
的情况···各比特为
“1”
的情况。
比特 状态
0
与伺服驱动器可通信
7
伺服 ON ( I )
8
原点位置
10
+极限
11
−极限
2)
状态
2
① 联锁错误的情况
信息 状态 (错误名称) 主要原因
0x609
前上面盖开错误 轴动作中打开盖时。
0x680
伺服 OFF 联锁错误 轴动作中伺服开关处于 OFF (O) 时。
0x6FE
紧急停止开关 轴动作中紧急停止开关被按下时。
② 联锁错误以外的情况
信息 状态 (错误名称) 主要原因
0x304
伺服准备 OFF 错误 轴动作之前伺服轴尚未处于可动作的状态时。
0x401
驱动器通信错误 以某些原因,在伺服驱动器侧发生通信错误时。
EJP1A-C-RMA04-A01-00