JUKI_2050说明书_.pdf - 第196页
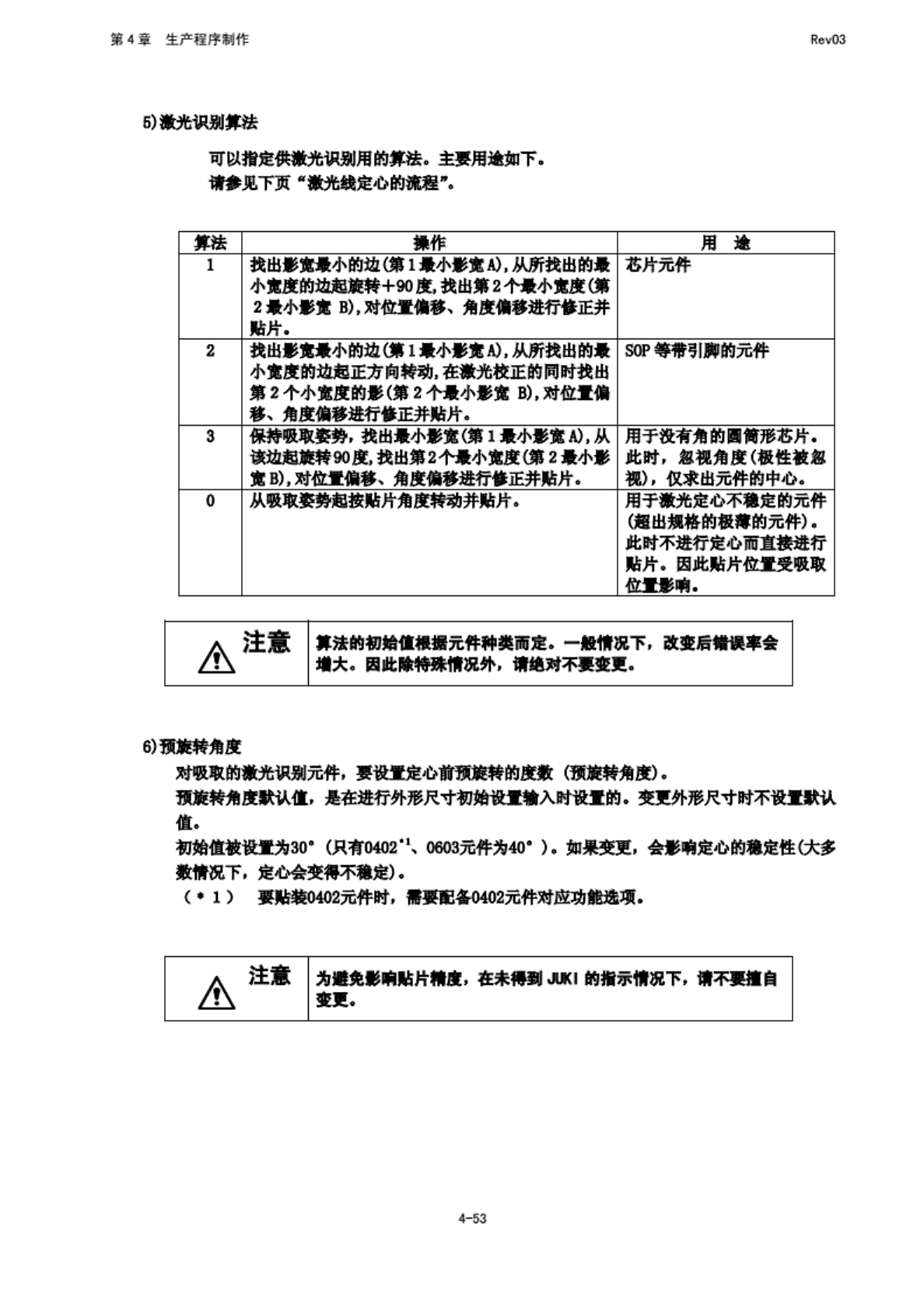
第 4 章 生产程 序制作 Rev03 6 ) 激光阳 I 算法 可以 指定供 激光识 别用的 算法, 主 要用途 如下. 说舍 见下页 '激光 微定心 的流程 。 操作 用 途 1 找出 影富最 小的边 便 1 量 小武窟 A ), 从所找 出的量 小宽度 的曲起 旋转 +90 图 找出第 2 个景小 宽度集 2 景小 话索 B ), 对位置 偏移、 角度偏 移进行 修正并 贴片. 芯 片元件 2 找出承 童款 小的边 便 …
第
4
章
生产程
序制作
Rev03
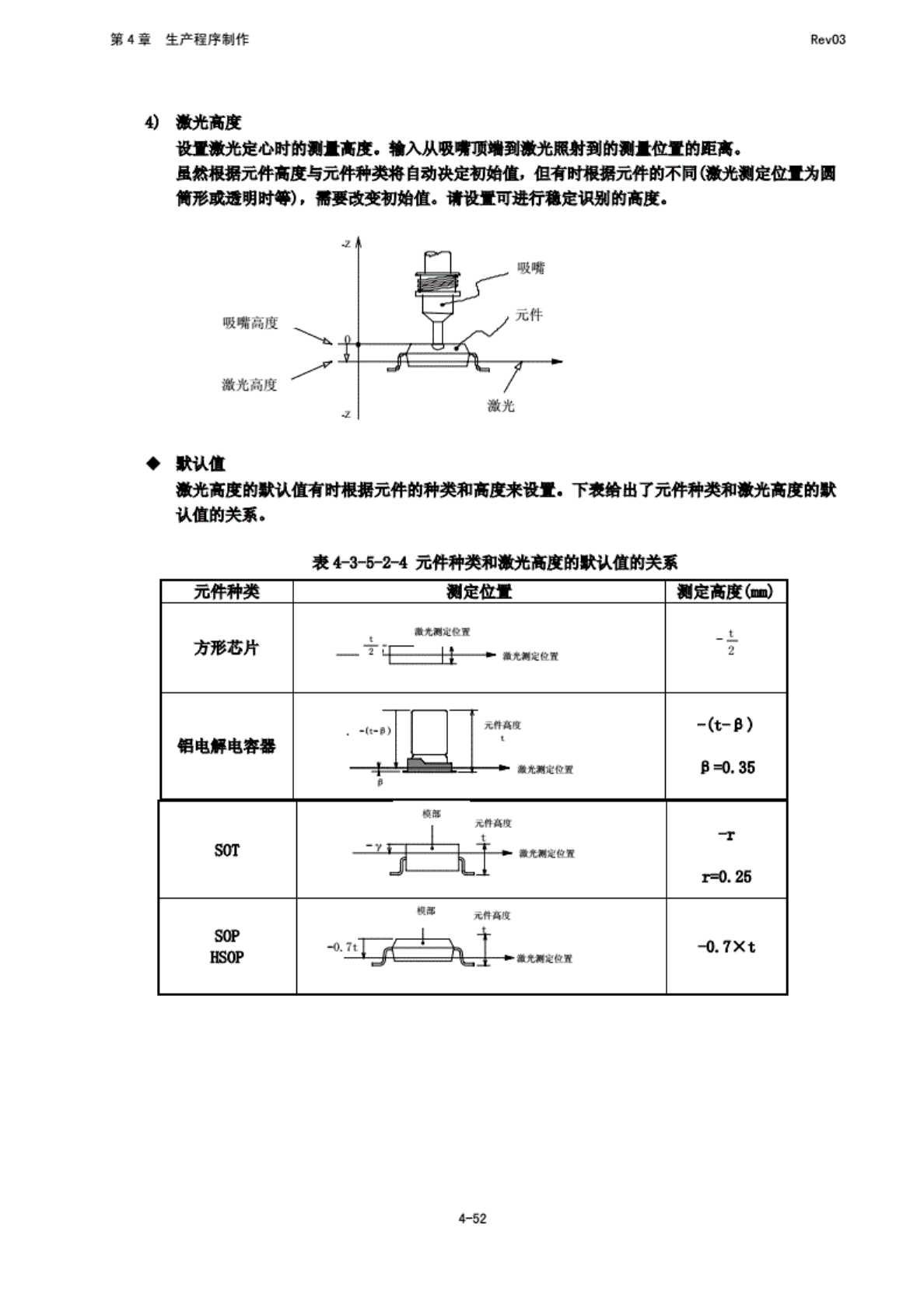
4)
激
光高度
设
光定心
时的费
tt
高度.
输入从
吸嘴项
靖到
激光照
射到的
能■位
置的
电离.
星
is
根据元
件高度
与元件
种美将
自动决
定初始
值,
但有
肘根
据元件
的不同
(激光
耦定位
置为圆
筒形或
遗期时
等),
需要
改变初
始值,
联置
可雉行
穗定识
别的
高度.
默认值
激连
高度的
默认
值有
时根据
元件的
种类和
高度来
设置.
下
表给出
了元件
种类前
滋光高
度的默
认值的
关系.
表
上3
-斤
2-4
元件
种类
和激
光高度
的默
认情
的关系
例
定也置
制
定茂度
(3
方
形芯片
U
酷比
扁定
性就
—
2
曾
1
4
—
-
甯危熹
定位置
—工
铝电解
电容播
-(t-B)
P=0.
35
.
正
力
」」
I
元
件高度
U
:
3
上
—
i_
#1
.无
需定
位支
SOT
澳国
F
元件
育度
F
r=0.
26
SOP
HSOP
展部
元件
K
班
见
九1
_/(
-3
w
也坦
-OHXt
4-52
第
4
章
生产程
序制作
Rev03
6
)
激光阳
I
算法
可以
指定供
激光识
别用的
算法,
主
要用途
如下.
说舍
见下页
'激光
微定心
的流程
。
操作
用
途
1
找出
影富最
小的边
便
1
量
小武窟
A
),
从所找
出的量
小宽度
的曲起
旋转
+90
图
找出第
2
个景小
宽度集
2
景小
话索
B
),
对位置
偏移、
角度偏
移进行
修正并
贴片.
芯
片元件
2
找出承
童款
小的边
便
1
景
小雅建
Q,
从所找
出的景
小宣
度的边
起正方
向转
动.
在激
光校
正的同
时找出
第
2
个小宽
度的量
(第
2
个最
小球重
B),
对位
置偏
移、
角度
偏移
进行修
正并贴
片。
等
带引脚
的元件
3
保
持吸取
姿势,
找出
量小最
宽图
1
量
小最富
A),
从
该边起
旋转
90
度,
找出第
2
个最小
常度便
2
量小影
宽
B),
对位置
偏移、
焦
度偏移
进行净
正井贴
片,
用于没
有角的
脚筒形
芯片.
此时
》
忽
视角度
《极
性被忽
仅求出
元件的
中心.
0
从吸取
姿势起
按贴
片角
度转动
井贴片
.
用于激
用定心
不稳定
的元件
(超
出热格
的极薄
的元件
3
此时不
法行定
心而直
接进行
贴片。
因此贴
片位置
受吸取
位
置影咻
於注意
算法的
初始值
根据元
件种类
而定.
一毅情
况下,
改变后
《
1
辑率会
通大*
因此除
特殊情
况外,
请电
对不塞
变更.
6)
预旋
转增度
对败
取的激
光识别
元件,
要设
量定心
前源
旋转
的度数
律旋转
角度"
预旋转
角度默
认值,
是在
进行外
形尺寸
初始设
置输
入时红
的。
变更外
形尺寸
时不设
置默认
值口
初始
值被
设置为
30.
(只有
0402」、
0603
元件为
40.
).
如果
变更,
会
第喘定
心的
稳定性
供多
裁情
况下,
定
心会变
得不稳
定).
(
X
)
要联
0402
元件
时,
需
要配备
0402
元件对
应功能
选项.
小注意
为
鹏克弗
府贴及
精度,
在
未得到
MKI
的
指示情
况下,
请不
要擅自
变
更.
4-53
第
4
章
生产程
序制作
Rev03
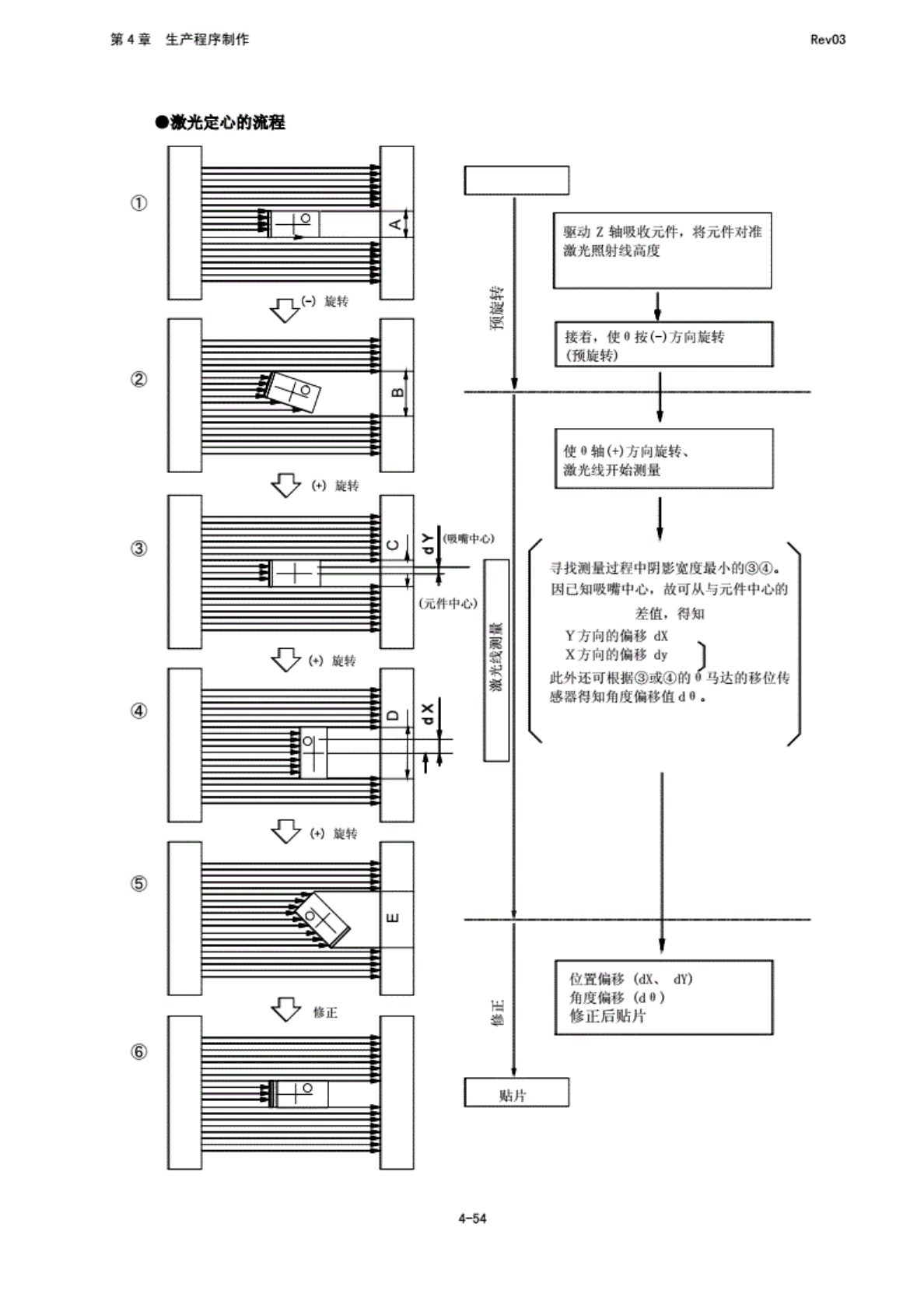
(曦
嘴中
6)
(元件
中心)
p
.微
测*
过相
中阴
影宽
度通小
的③
:工
因已
知吸嘴
中心,
故可从
三元件
中心的
差值,
得知
Y
方
向的偏
移
dX
X
方
向的循
移
的
此外
注可根
据③或
马达的
移位将
越幽得
如痛度
偏移他
dO.
位置偏
移
CM、
dv)
角度
偏移
30
修正后
贴片
・缴
光定心
的流程
W
旋转
O
M
旋转
!
二^=1
0]
。
(-)
旋甚
0
修正
贴片
M
二毒骂
裁会
4-54