JUKI_2050说明书_.pdf - 第274页
第 4 章 生产程 序制作 Rev03 标记类 t 送 料器台 (前 面/ 后面) 派 别送料 器台标 记, 储存第 别坐标 的实涌 值. 核实 簿值将 在贴片 数据示 藏时的 坐标修 正中得 到 反映. 从莱 单栏 中逸邦 '机相 探作" / "确 认" / *标 记类” / “送料 舞台* , 显 示确认 面面. 识别前 面 送料暴 台的标 记时, 请选择 “前 面* , 职 别后面 送料器 …
第
4
章
生产程
序制作
Rev03
4~5~4^4
确认
此
功能为
确认生
产程序
的第算
内容的
功能。
后
注意
为了跑
党人身
伤事,
在机盘
运有过
程中,
切剪将
手和暴
伸入装
,内
部.
4-5-4-+-1
标
记类:
BOC
很剧
BOC
扁
0,
并将
识别坐
标的加
值储
存在主
体中.
诚实
测值将
在贴片
数据示
教时的
坐标修
正
中得到
反映.
从
莱单栏
中选择
.
机器操
作*/
"瑞
认*
/
'标记
系统#
/
*眦l
显
示确认
画面.
此时.
刘果
安全费
打开,
由
于是轴
动作所
产生的
功能,
因此
显示如
下的倩
患.
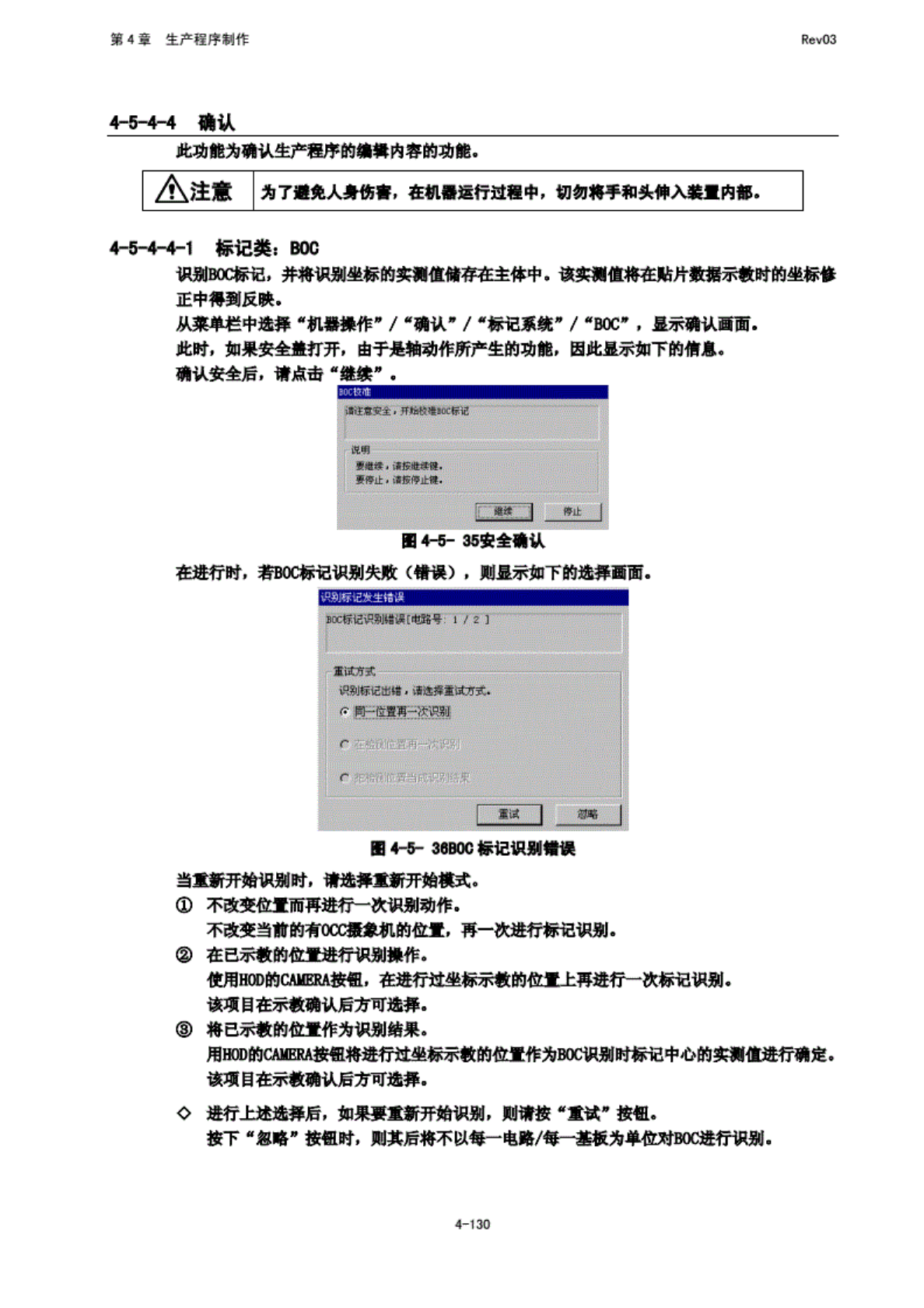
确认安
全后,
靖点击
继
续”
.
图
i
35
安
全确认
在进
行时,
若
BOC
标记识
别失股
《错
误》
,
则显示
如下
的选择
画面.
圈在
3GB0C
标圮飒
别㈱提
当重新
开始识
别时,
请
选择重
新开始
做.
不政交
位量而
再进行
一
次职别
动作.
不
改变当
前的有
W
图
象机的
位置,
再一次
进行标
记
识别.
在已
示教的
位置进
行识别
操作.
使用
即
D
的
CAMERA
按钮,
在进行
过坐
标示裁
的位置
上再进
L
次标
记积
别.
该项
目
在示教
确认
后方可
透挥.
将已
示教的
位置作
为识别
绪果,
用卿
D
的
CAMERA
按钮将
进行过
里标示
载的位
置作为
BOC
识
别时标
记中心
的实棚
值进行
确定.
该项
目
在示教
确认
后方可
选择.
。
进行
上述选
择后,
如
果要重
新开始
识别,
则清按
*
重试”
按
钮.
按下
“忽
略”
按
钮时,
则其后
将不以
每一电
路/每
T
板为
单位对
BOC
进行
识别.
4-130
第
4
章
生产程
序制作
Rev03
标记类
t
送
料器台
(前
面/
后面)
派
别送料
器台标
记,
储存第
别坐标
的实涌
值.
核实
簿值将
在贴片
数据示
藏时的
坐标修
正中得
到
反映.
从莱
单栏
中逸邦
'机相
探作"
/
"确
认"
/
*标
记类”
/
“送料
舞台*
,
显
示确认
面面.
识别前
面
送料暴
台的标
记时,
请选择
“前
面*
,
职
别后面
送料器
台时,
请选择
"后
面"
.
K4-5-
37
送科
器自识
别施以
在逐
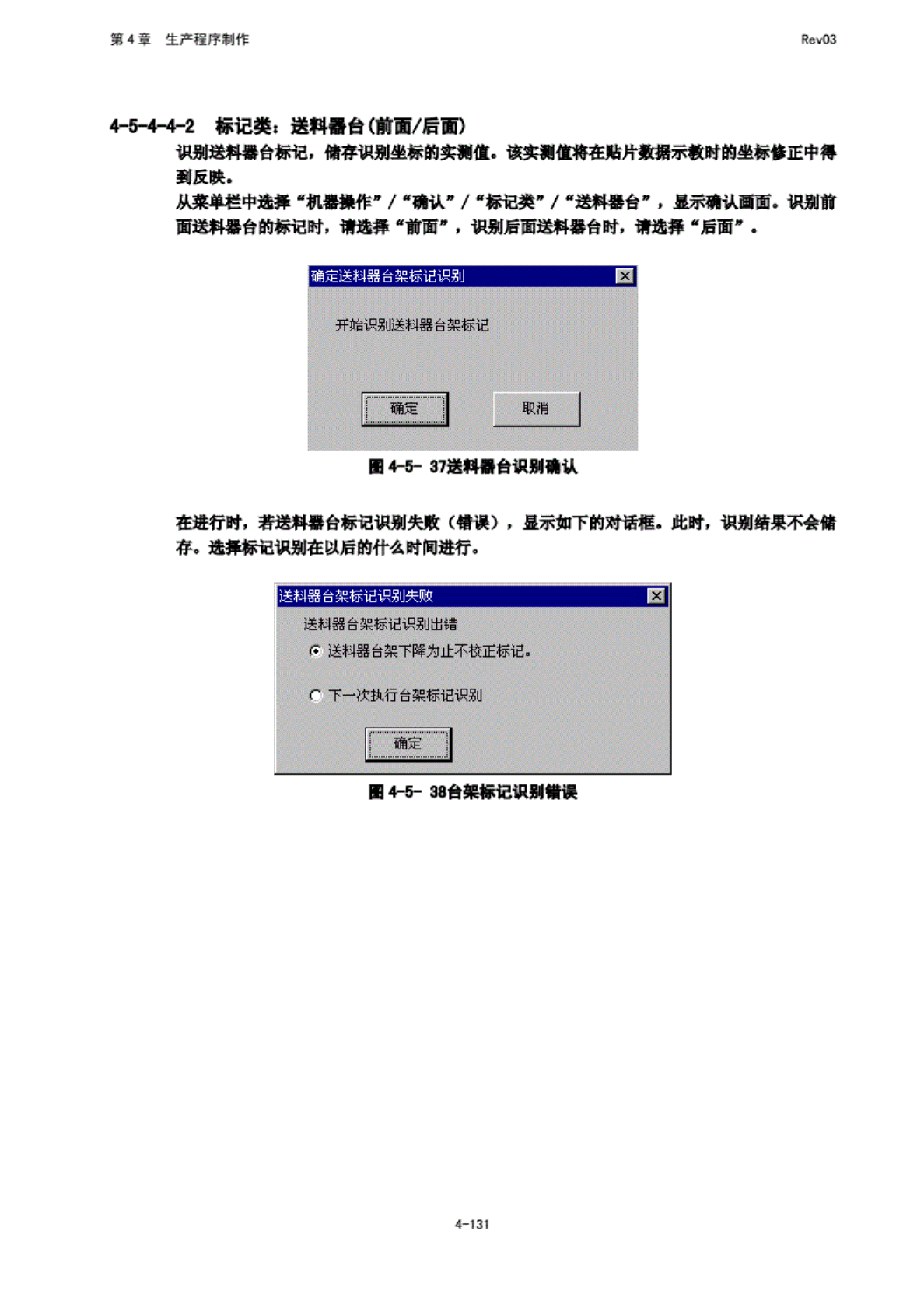
行时,
若送
料器台
标圮识
别失败
(如
O
,
显示如
下的对
话框.
此明
根
副结果
不会储
存.
选峰
标记识
别在以
后的件
次时同
进行.
送料
器台架
标记识
别失败
送料
器台架
标记识
别出错
正
送料器
台架下
降为止
不校正
标记。
广
下一
校执行
台架标
记识别
确定
B4-5-
弱台架
标记级
别错调
4-131
第
4
章
生产程
序制作
Rev03
4-H-3
坐标类
t
贴片位
置
通过
量氧
机跟踪
贴片
位置,
确认监
视器中
显示的
贴片
位置,
当输
入坐
标不准
薪时,
可通过
示裴
进行
修正,
1)
条
件战定
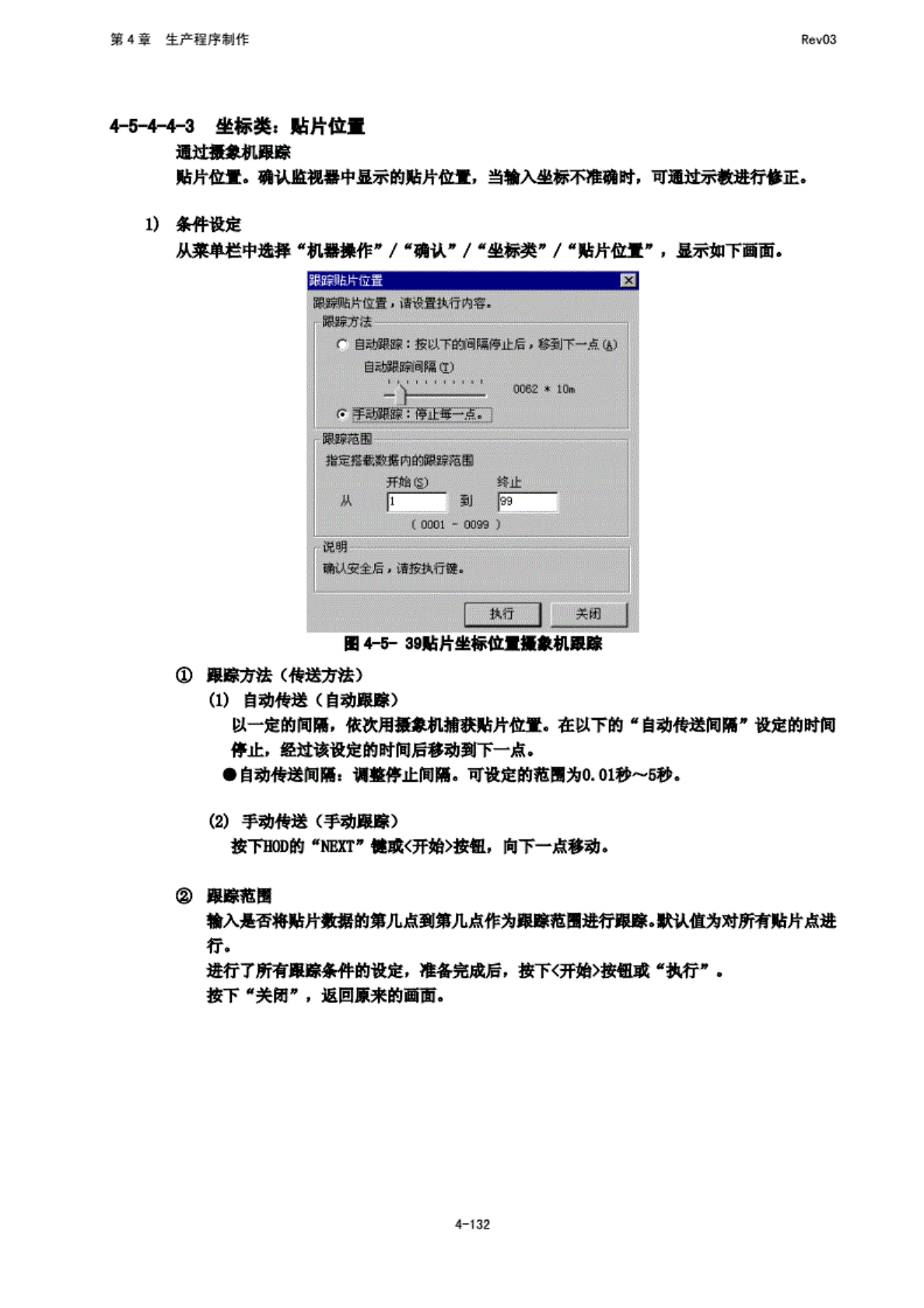
从
莱单栏
中选择
.机器
操作.
/
"确
认"
/
"坐
标类"
/
*
贴片
,
显
示如下
画面.
BB4-5-
39
贴片
坐标位
,搔象
机跟腺
黑
腺方法
(传转
方法)
(1)
自
劫传送
(自动
跟踪)
以一
定的间
修,
依
次用摄
鑫机
捕获
贴片
位置.
在以
下的
"自
动持送
间隔*
设定
的时间
停止
经
过读设
定的时
间后移
动到下
一点.
・自动
传送间
隔上
调整
停止间
隔.
可设
定的疱
01
为
0.01
砂
一例.
(2)
手
动特送
(手动
质噂)
按下
H
w
的
“NEXT”
镂成
<开
始〉
按钮,
向
下一点
移动.
剧
骞范国
输入
是否将
贴片
数据
的第几
点到第
几点作
为跟原
范围进
行跟原
.默
认值
为对所
有贴
片点进
行.
进
行了所
有跟踪
条件的
设定.
准备完
成后,
按下
开始〉
按钮或
*
执行*
.
按下
“美
司”
,
返回
原来的
画面.
4-132