JUKI_2050说明书_.pdf - 第277页
第 4 章 生产程 序制作 Rev03 3) 跟踪 时的坐 标示教 当 跟踪的 坐标与 实际不 同时, 可用电 嗨 行贴片 坐标的 示教. 等* 将光 标移 动到 X 或 f 坐标. 按 HO0 装置 按钮, 进行 坐标示 敖, 鼎后援 确定0 S 4-5- 41 正在进 行示赦 要使确 定的坐 标值有 效时, 按下 判定》 或再次 按下 即网. 返回坐 标时. 按下6 消、 威 4Al T 坐标类 t 吸取位 取高度 通过 摄象 机跟…
第
4
章
生产程
序制作
Rev03
勤
正
在执
行贴片
坐标位
置摄霰
机周原
刚执
行后,
在各贴
片坐标
的跟踪
中显示
如下的
对话
幅.
图
4"
即
40
正
在进行
贴片位
机跟踪
状态
(1)
显
示用样
送方法
设定的
“手动
心
或
.
自制*
.
黑
踪范昌
当
选舞房
有贴
片歌据
时,
显示
“神
T
、
“最
后”
.
当
变更了
蒯领
国时,
显示
蜘号,
(
3)
跟
踪状态
"动
作中"
表示轴
正在器
动中*
*哲
停
”衰示
处于自
动传送
中的暂
停中.
"停止
"表
示
手动传
送或有
廉识的
停止.
“轴
特诲中
正在细
j
移动
到安全
位置*
*标
记以
别中”
表示正
在很别
IC
标记.
(4)
停止嘉
余时间
显示
自
动
传送中
的
替停剩
余帧间
.
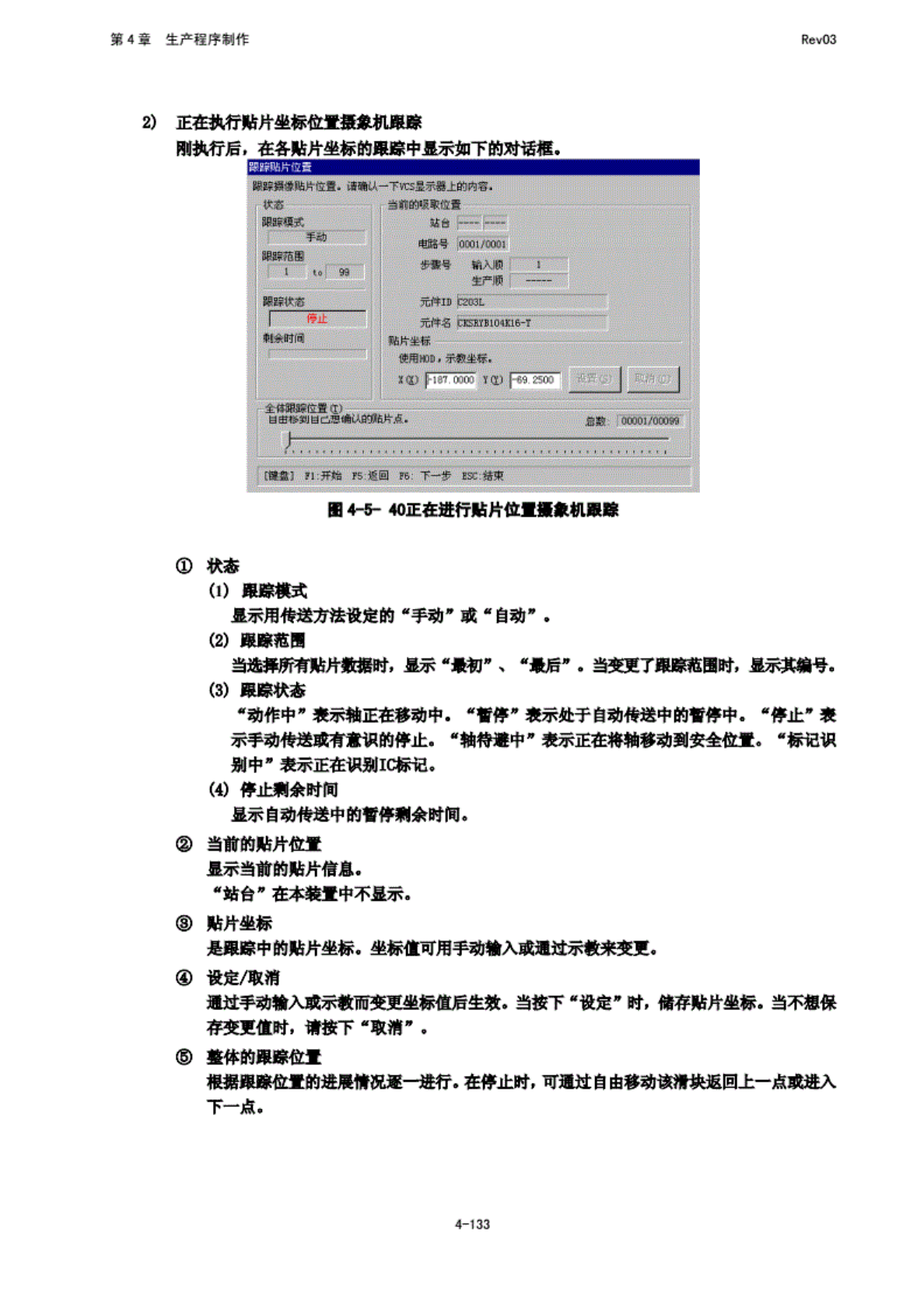
当前
的贴
片位置
显
示当前
的贴片
信息.
“站
台”
在本装
置中不
显示.
贴
片坐标
是跟
除中的
贴片
坐标.
坐标值
可用手
动输入
或通过
示教来
变更.
设定
能消
搬
过手动
输入或
示教而
受更坐
标值后
生效.
当按下
.设定
.粉,
储存
贴片
坐标.
当
不想保
存变更
值睹,
请按下
"取
满”
.
©
整体
的果谢
S
根据
跟明迪
t
的进
展情
况程
Tff,
在停
止时,
年通
过自由
移动潮
I
假返回
上一点
或进入
下
一点.
4T33
第
4
章
生产程
序制作
Rev03
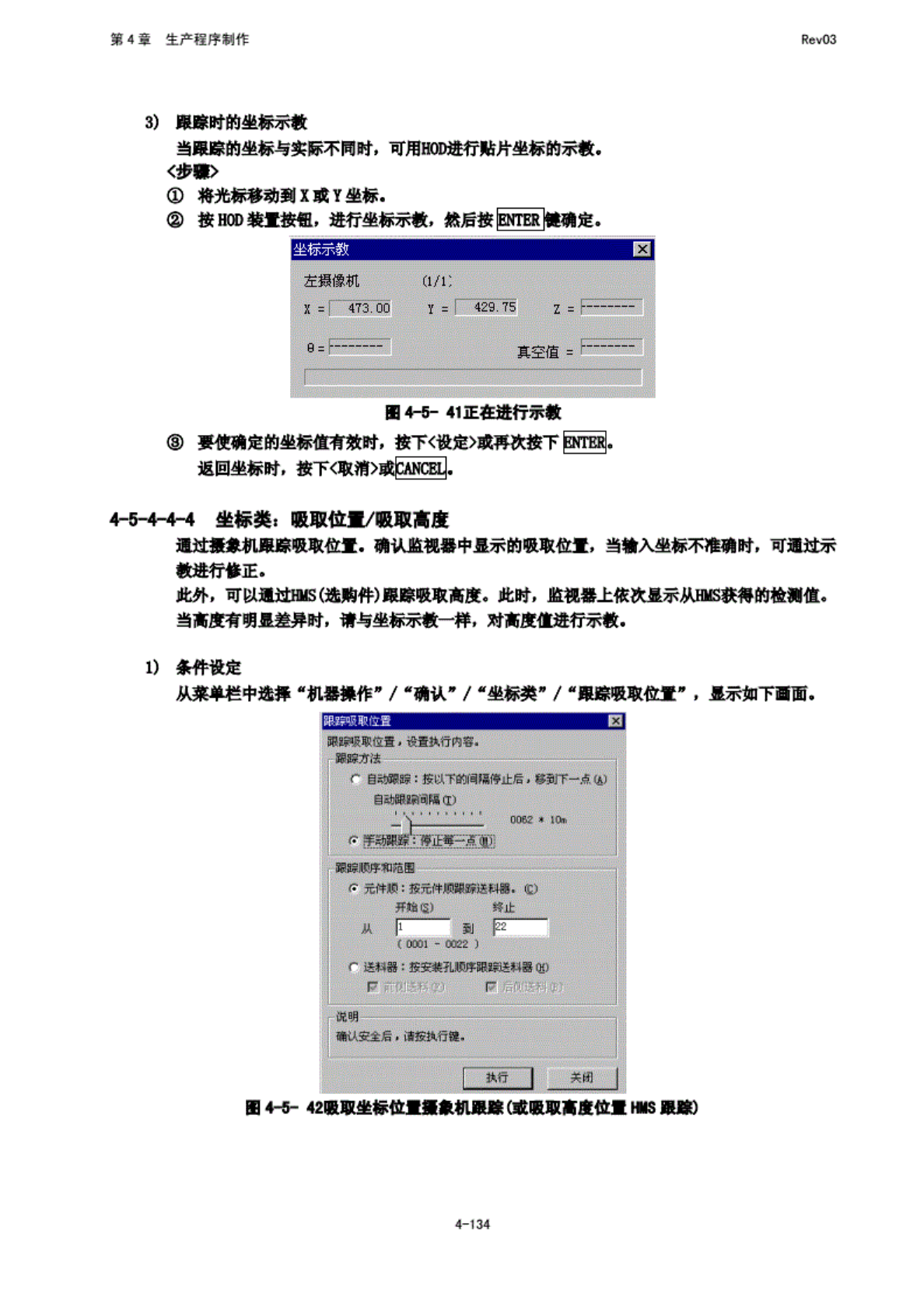
3)
跟踪
时的坐
标示教
当
跟踪的
坐标与
实际不
同时,
可用电
嗨
行贴片
坐标的
示教.
等*
将光
标移
动到
X
或
f
坐标.
按
HO0
装置
按钮,
进行
坐标示
敖,
鼎后援
确定0
S
4-5-
41
正在进
行示赦
要使确
定的坐
标值有
效时,
按下
判定》
或再次
按下
即网.
返回坐
标时.
按下6
消、
威
4Al
T
坐标类
t
吸取位
取高度
通过
摄象
机跟踪
吸取位
置,
确认盟
视器中
显示的
吸取
的,
当
精入壁
标不准
确时,
可
通过示
款进行
修正.
此外,
可
以通过
HMS
(选
购件)
躁
院吸取
高度.
此时,
监
视能上
依次
显示从
HH
球
得的检
滞值。
当
高度有
明显差
异时,
请与坐
标示敖
一祥,
对高度
值进行
示教.
1)
条
件设定
从
菜单栏
中选押
注
机器
操柞
"
/
"确
认"
/
"型
标类*
/
*触
眼取位
置”
,
显示
如下面
S.
ffl
48
421ftsi
型标位
相限膝
(靠吸
取
高度拉
郦
照制
4-134
第
4
章
生产程
序制作
Rev03
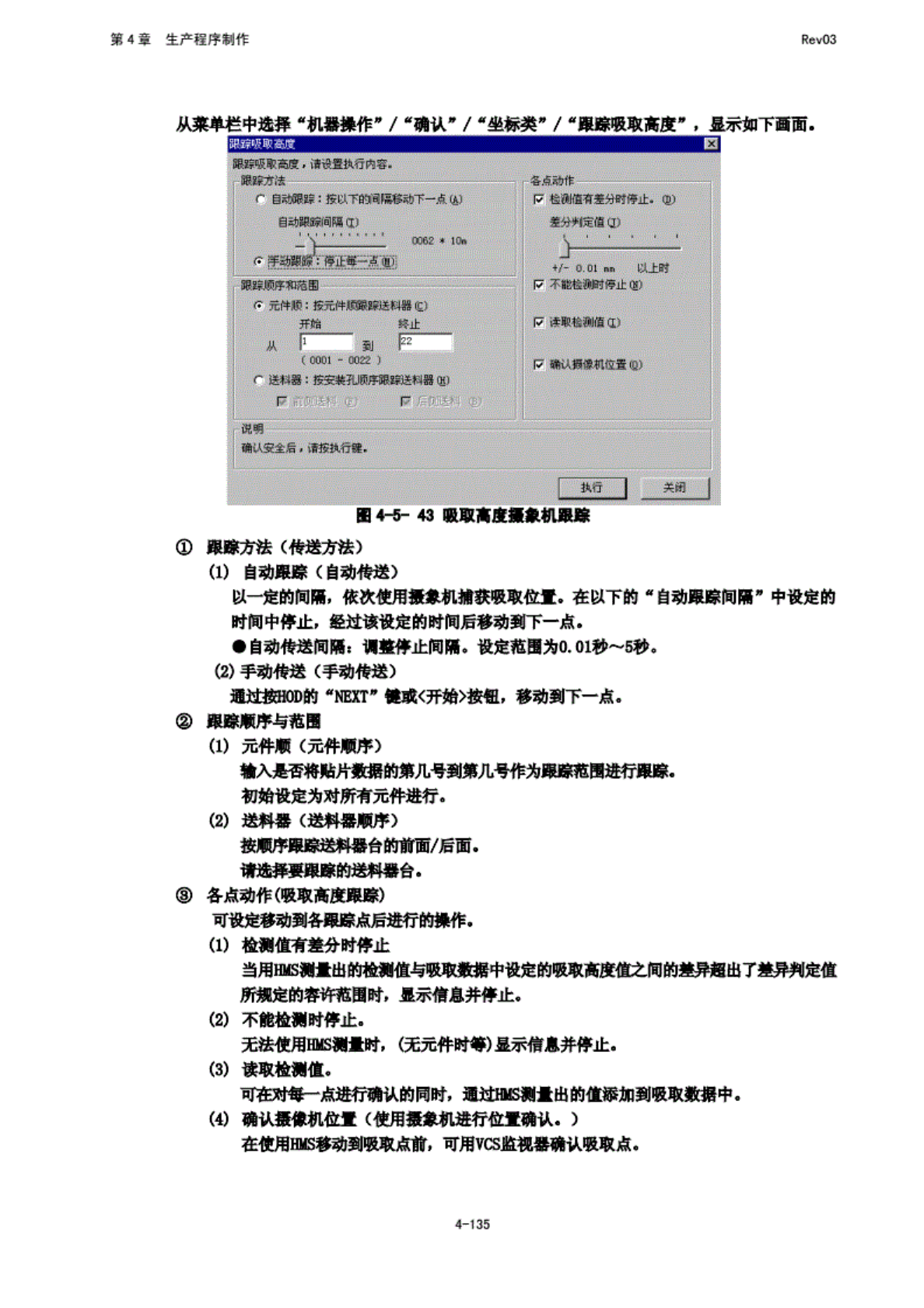
从菜
单栏
中选择
"机
壁操
作"
/
"确
认"
/
"
坐
标类*
/
*
黑
踪吸取
高度*
.
显示如
下直
面.
图
4~6
43
吸
取青
度覆象
机跟踪
(0
自
动是球
(自动
接送)
以
一定的
间隔,
依次使
用覆象
机捕获
吸取位
置“
在
以下的
“自动
眼腺间
隔”
中
设定的
时间中
停止,
经
过该设
定的特
间后移
动到下
一点.
,自
动传送
间隔,
调驻停
止间
隔.
没定
范围为
0.01
秒
硝.
手
前椅送
(手动
检送)
通过搁
“NEXT"
健或
《开始》
按钮,
移
动到下
一点.
周踪
耀序
与范围
(1)
元件藏
t
元件顺
序》
看入
是否将
贴用
ft
据的第
几号
到第几
号作为
躁踪范
围进行
跟踪.
初始设
定为时
所有元
件进
行,
送料整
(送
料品顺
序)
按顺
序跟
踪送料
器台的
前面/
后面.
请
9瞟朦
的送牺
器合.
各
点动作
(吸
取高
度赚爵
可设定
移动到
各爆踪
点后进
行的操
作,
(1)
检消值
有差分
时停止
当用
H
明渊*
出的检
制值与
吸取
重据中
设定的
吸取高
度值之
同的晚
异超出
了整异
判定值
所
规定的
容许蓊
国时,
显示
信息井
停止.
(2)
不能检
消时
停止.
无法
使用
脚墙
时,
玩
元件
明勤
显示
信息并
停止.
(3)
读取检
测值.
可在对
每一点
进行确
认的同
时,
通过
HMS
棚量出
的值添
加到吸
取蝴
中.
(4)
确
认摄像
机位置
(使
用摄电
机进行
位置硬
礼.
)
在使用
弹
移动到
吸取点
前,
可用
VCS
监
视器确
认吸
取点.
4-135