00193574-02.pdf - 第127页
Manuale per l'uso SIPLACE HF 3 D ati t ecni ci Versione software SR.504.xx Edizione 07/2003 IT 3.10 Sistemi Vision 127 3.10 Si stemi V ision Ogni tes ta Collect& Place a 6 e a 12 segmen ti possied e il pro prio …
3 Dati tecnici Manuale per l'uso SIPLACE HF
3.9 Portali Versione software SR.504.xx Edizione 07/2003 IT
126
L’asse Y è composto sostanzialmente dai seguenti gruppi di componenti principali: 3
– Azionamento lineare con magnete permanente (1)
– Sistema guida (2)
– Sistema di misura del percorso lineare (3)
– Porta cavi (4)
3
L'asse Y è azionato da un motore lineare. La parte secondaria dell'azionamento è formata da ma-
gneti permanenti ed è montata nella base della macchina. La parte primaria è avvitata al portale.3
3.9.5 Dati tecnici dell’asse Y
Trasmissioni Diretto, motore lineare
Velocità max. 2,5 m/s
Percorso di spostamento dei portali 1430 mm
Sistema di misura del percorso Righe lineari di metallo
Lunghezza della riga 1850 mm
Risoluzione 1 µm
Manuale per l'uso SIPLACE HF 3 Dati tecnici
Versione software SR.504.xx Edizione 07/2003 IT 3.10 Sistemi Vision
127
3.10 Sistemi Vision
Ogni testa Collect&Place a 6 e a 12 segmenti possiede il proprio modulo Vision dei componenti
(vedi Fig. 3.3 - 2
pagina 94 e Fig. 3.3 - 5 pagina 99). La videocamera CO, stazionaria, P&P (tipo
22) 50 x 40 per la TwinHead è fissata al telaio della macchina. 3
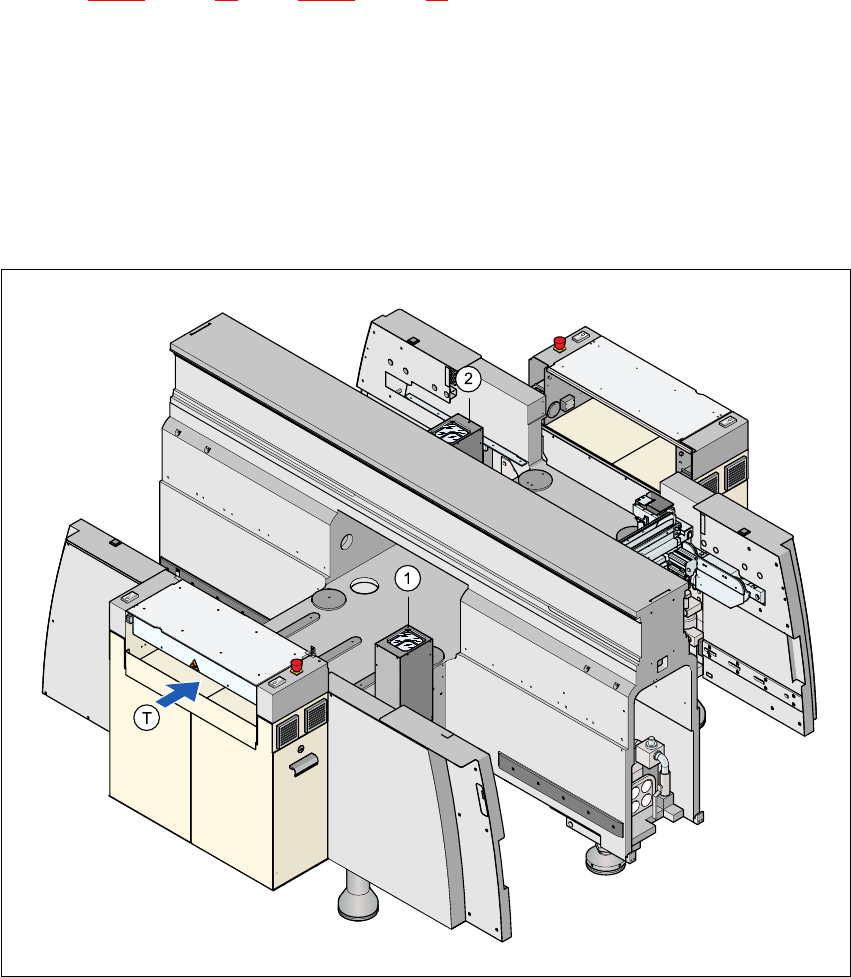
Posizioni di montaggio della videocamera CO, stazionario, P&P (tipo 22) 50 x 40 3
3
3
Fig. 3.10 - 1 Posizioni di montaggio della videocamera CO, stazionario, P&P (tipo 22) 50 x 40
3
(1)Posizione di montaggio per il posto 1
(2)Posizione di montaggio per il posto 3
TwinHead Videocamera CO, stazionario, P&P (tipo 22) 50 x 40
Portale 1 Posto 1
Portale 2 Posto 3
3 Dati tecnici Manuale per l'uso SIPLACE HF
3.10 Sistemi Vision Versione software SR.504.xx Edizione 07/2003 IT
128
ATTENZIONE - PERICOLO DI SCONTRO DELLA TESTA 3
Durante la sostituzione di una testa, dalla testa TwinHead alla testa Collect&Place, la videoca-
mera CO, stazionaria, P&P (tipo 22) 50 x 40 e la videocamera CO, stazionaria, P&P (tipo 20) 8 x
8 della TwinHead devono essere smontate, altrimenti la testa Collect&Place collide con gli invo-
lucri della videocamera.
Con l’aiuto del modulo Vision si calcola 3
– la posizione esatta del componente nella pipetta e
– la geometria della forma involucro.
Il modulo Vision CS calcola con l’aiuto di fiducial di scheda nel CS 3
– la posizione del circuito stampato,
– il suo angolo di rotazione
– ed il ritardo del circuito stampato.
Le videocamere CS sono fissate al lato inferiore dei portali. Con l'aiuto di fiducial di superficie sui
caricatori, calcolano la posizione di prelievo esatta dei componenti, cosa importante soprattutto
per i piccoli componenti. 3