NXTIII-IIIC规格书PDFA.PDFA.pdf - 第12页
- 12 - CNT -NXT -3/3c-04S 3.1.4 主搬运轨 标准装备 的马达可自动 变更搬运轨的 宽度。消除电路板 停止时对 电路板的冲击,并 可轻松更改电路 板 的搬运方向。 双搬运轨 不仅 可以 搬运 / 生产同种类的电路板 ,也可搬运 / 生产不同种电路 板,还可以 将 2 个搬运轨分 别设定为不同宽度。 详细内容 请参照『 3.2 搬 运轨』 。 3.1.5 支撑板 NXT-3 中安装的支撑 板虽是固定式的(仅 图…
-11- CNT-NXT-3/3c-04S
3. 机器构成
3.1 机器构成概要
<机器构成概要>
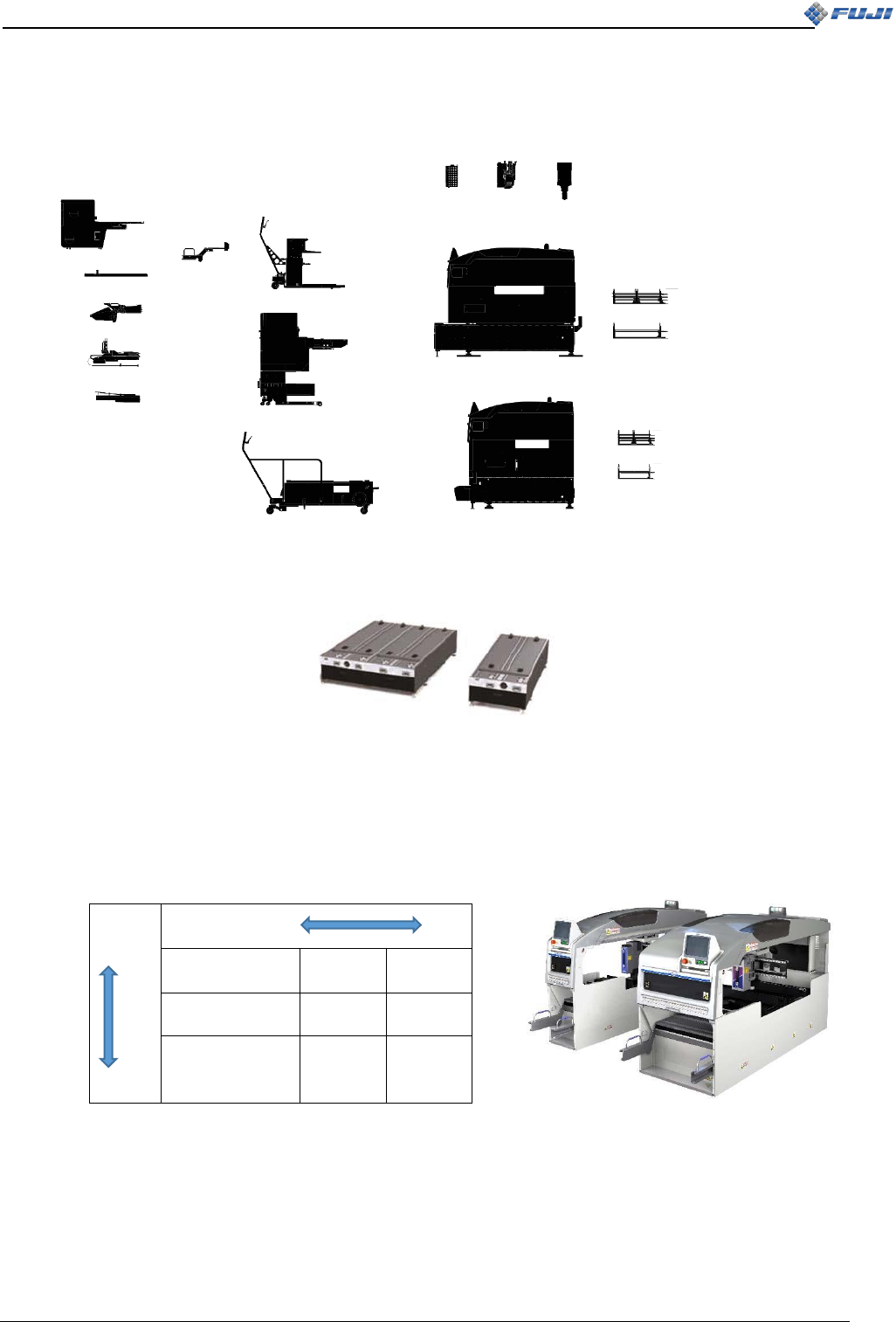
3.1.1 基座
搭载模组的基座。根据生产线的构造从 2M-3 基座/4M-3 基座/2M-3c/4M-4c4 种基座尺寸中选择。
详细内容请参照『2.1 要素』。
3.1.2 模组
模组有 XY 机械手、贴装工作头、搬运轨、电路板夹紧机构、料站单元和影像处理相机的组合构
成。模组使用台车可轻松地进行更换,机器的构成可根据用户的需要变更。
详细内容请参照『2.1 要素』。
小
占
地
面
积
大
宽幅 小 大
类型
M3
M6
NXT-3c
M3-3c
M6-3c
NXT-3
M3-3
M6-3
3.1.3 工作头
根据对象元件选择工作头。更换工作头时只需一个动作。
使用 IH1 时,需要在料站托架上安装 IH1 单元。
详细内容请参照『3.3 工作头规格』。
4M
2M
JJOC0djO
JJOC0djO
Downloaded at 2017/08/25 12:08:301 by 341B1639 DL#NsNk3jPS
-12- CNT-NXT-3/3c-04S
3.1.4 主搬运轨
标准装备的马达可自动变更搬运轨的宽度。消除电路板停止时对电路板的冲击,并可轻松更改电路板
的搬运方向。
双搬运轨不仅可以搬运/生产同种类的电路板,也可搬运/生产不同种电路板,还可以将 2 个搬运轨分
别设定为不同宽度。
详细内容请参照『3.2 搬运轨』。
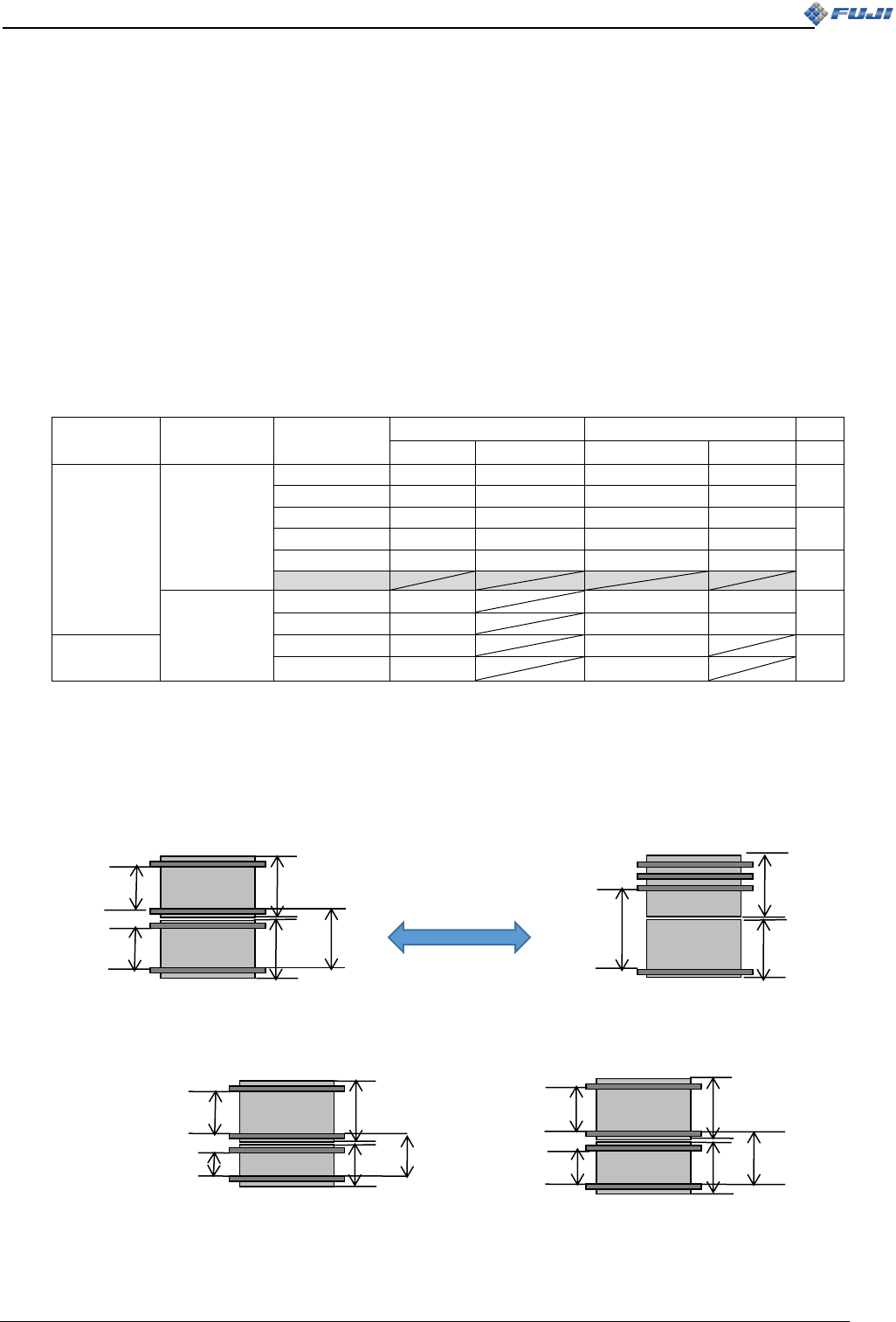
3.1.5 支撑板
NXT-3 中安装的支撑板虽是固定式的(仅图A类型),但若使用可拆卸的支撑板(选购件),则可
对应复杂电路板组合的生产。
在通道 1 和通道 2 上安装相同尺寸的支撑板,即可不更换支撑板的情况下切换双搬运轨和单搬运轨
(图A,D)。而且更换通道 1 的支撑板尺寸,即可将通道 2 的基准通道向操作员方向移至 212mm
(图B)或 247mm(图C)的位置,缩短周期时间。此时只需更换通道 1 的支撑板和移动通道 2 的
支撑板的安装位置即可对应。
单搬运轨中一种支撑板可对应所有尺寸的电路板(图E)。
搬运轨规格
电路板的搬
运方式
机型
电路板尺寸(W) (mm)
支撑板尺寸(W) (mm)
图
通道 1
通道 2
通道 1
通道 2
双搬运轨
搬运轨道
双轨道搬运
NXT-3
48~280
48~280
312
※
1
312
※
2
A
NXT-3c
48~170
48~170
202
※
1
230
※
2
NXT-3
48~165
48~280
215
※
3
312
※
2
B
NXT-3c
48~120
48~170
152
※
3
230
※
2
NXT-3
48~200
48~280
250
※
3
312
※
2
C
NXT-3c
单轨道搬运
NXT-3
48~510
312
※
1
312
※
2
D
NXT-3c
48~290
202
※
1
230
※
2
单轨道
搬运轨道
NXT-3
48~610
624
※
4
E
NXT-3c
48~380
432
※
4
※在双搬运轨中用通道 1 专用的支撑板。
※在双搬运轨中用通道 2 专用的支撑板。
※3 使用此支撑板时,后侧搬运轨相对于标准位置(电路板宽 170mm)向操作员方向移动。
※4 单搬运轨用的支撑板
☆标准类型
无需更换元件即可对应多种多样的生产。从双轨道
生产到大型电路板的单轨道生产
☆缩短周期时间类型(小型电路板对象)
通道 1 中生产小型电路板时
,可将通道 2 向料站侧移动,来缩短生产所需的时间。
无需更换支撑板
图 B
48~165
(120)
48~280
(170)
215
(152)
312
(230)
通道 1
通道 2
212
(167)
250
312
247
通道 1
48~200
48~280
图 C
48~280
(170)
312
(202)
通道 1
通道 2
图 A
48~280
(170)
312
(230)
327
(217)
48~510
(290)
通道 1
312
(202)
图 D
312
(230)
JJOC0djO
JJOC0djO
Downloaded at 2017/08/25 12:08:301 by 341B1639 DL#NsNk3jPS
-13- CNT-NXT-3/3c-04S
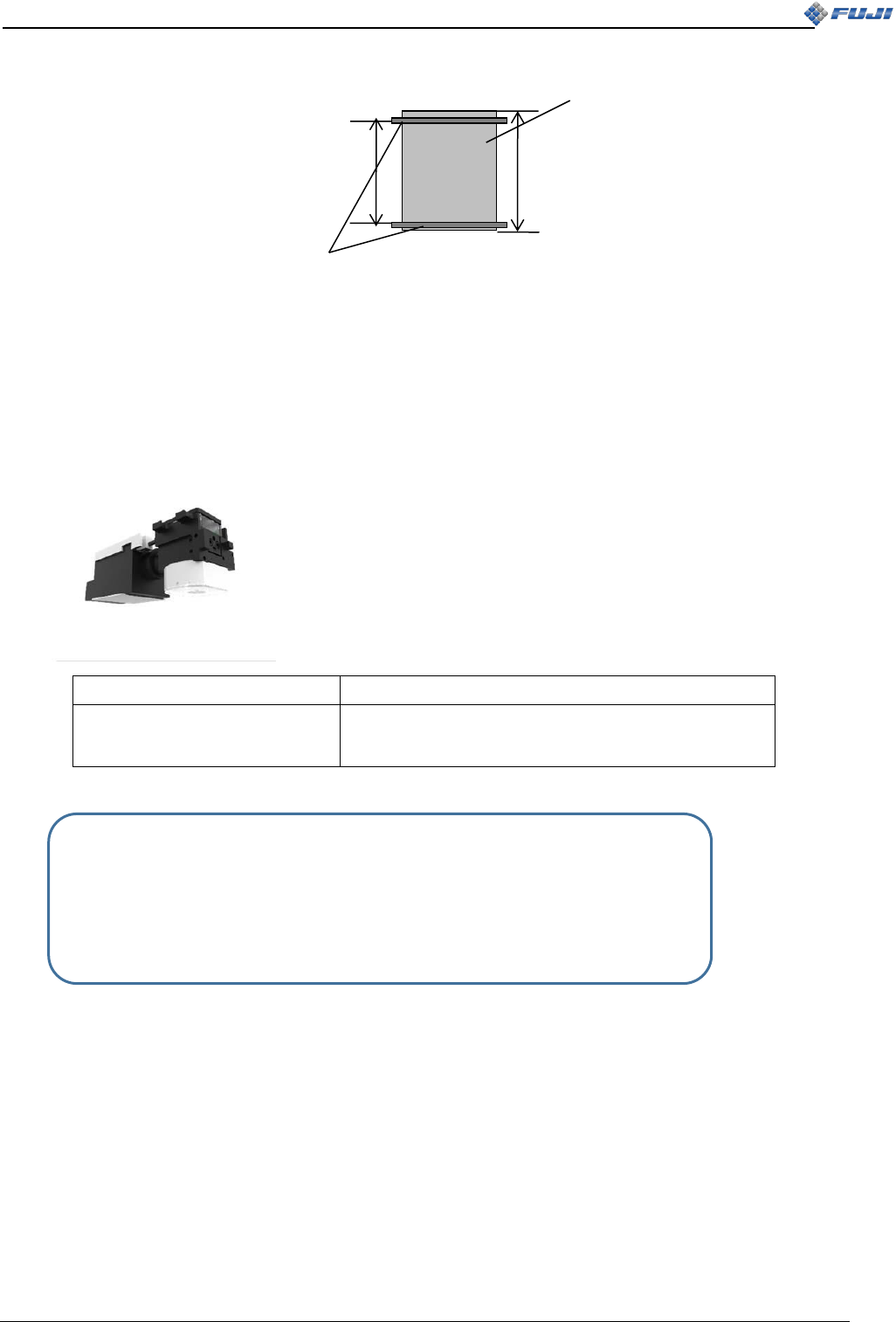
☆搬运大型电路板类型
图 D 为仅由单搬运轨搬运大型电路板时。
3.1.6 相机单元(元件识别)
各模组的工作头上固定的相机单元对元件吸取姿势进行影像处理、补正贴装位置。元件的影像处理方
法全部为前光处理(反射型影像处理方式)。
详细内容请参照『3.4 相机规格』。
3.1.7 相机单元(定位点识别)
各模组的工作头上安装的相机单元对电路板上的基准定位点进行影像
处理,识别电路板的位置对贴装位置进行补正。
还可读取电路板上的 2D 编码,判断电路板的种类。(Fujitrax 的选项
功能)
相机视野
□
9.1mm
基准点位点大小
Min
□
0.5mm~(其他以 FUJI 以往的运用为基准。)
※仅限圆形 φ0.2mm~
在以下条件范围内,可将电路板上的通孔和焊盘定位点当做定位点使用。
1) 通孔和焊盘定位点的形状与本公司标准定位点形状相同。
2) 通孔和焊盘定位点的尺寸在3.5mm以下。
3) 视野内没有形状相同的定位点。
4) 背景和定位点的对比度差在100以上。
5) 通孔和焊盘定位点的周围没有污垢和伤痕。
6) 通孔和焊盘定位点的边缘没有凹凸。
3.1.8 吸嘴・机械爪・点胶针
安装在工
作头上帮助工作头吸取元件的单元。从吸嘴形状到夹取元件、送至贴装位置的机械爪等可对
应元件范围广泛。
详细内容请参照『4.2 吸嘴规格』。
624
(432)
图 E
通道 1
48~610
(380)
支撑板
搬运轨
JJOC0djO
JJOC0djO
Downloaded at 2017/08/25 12:08:301 by 341B1639 DL#NsNk3jPS