NXTIII-IIIC规格书PDFA.PDFA.pdf - 第51页
- 51 - CNT -NXT -3/3c-04S 7. 本机支援 7.1 往返搬运轨 有 NXT 用往返搬运 轨。 往返搬运轨有 N XT 依存型和 自立型 2 种。 依存型自动变更搬运轨 宽,自立型需 要手动变更。 ※ 有关搬运轨的详细规格请 参照附件的 「 NXT 用往返搬 运轨规格说明书 」 。 7.2 VPDplus VPDplus 以从机器和相机平台读取的影像 为基础 , 配置基本模 块、 创建 影像处理 数据。 用鼠标决定…
-50- CNT-NXT-3/3c-04S
※6
※7
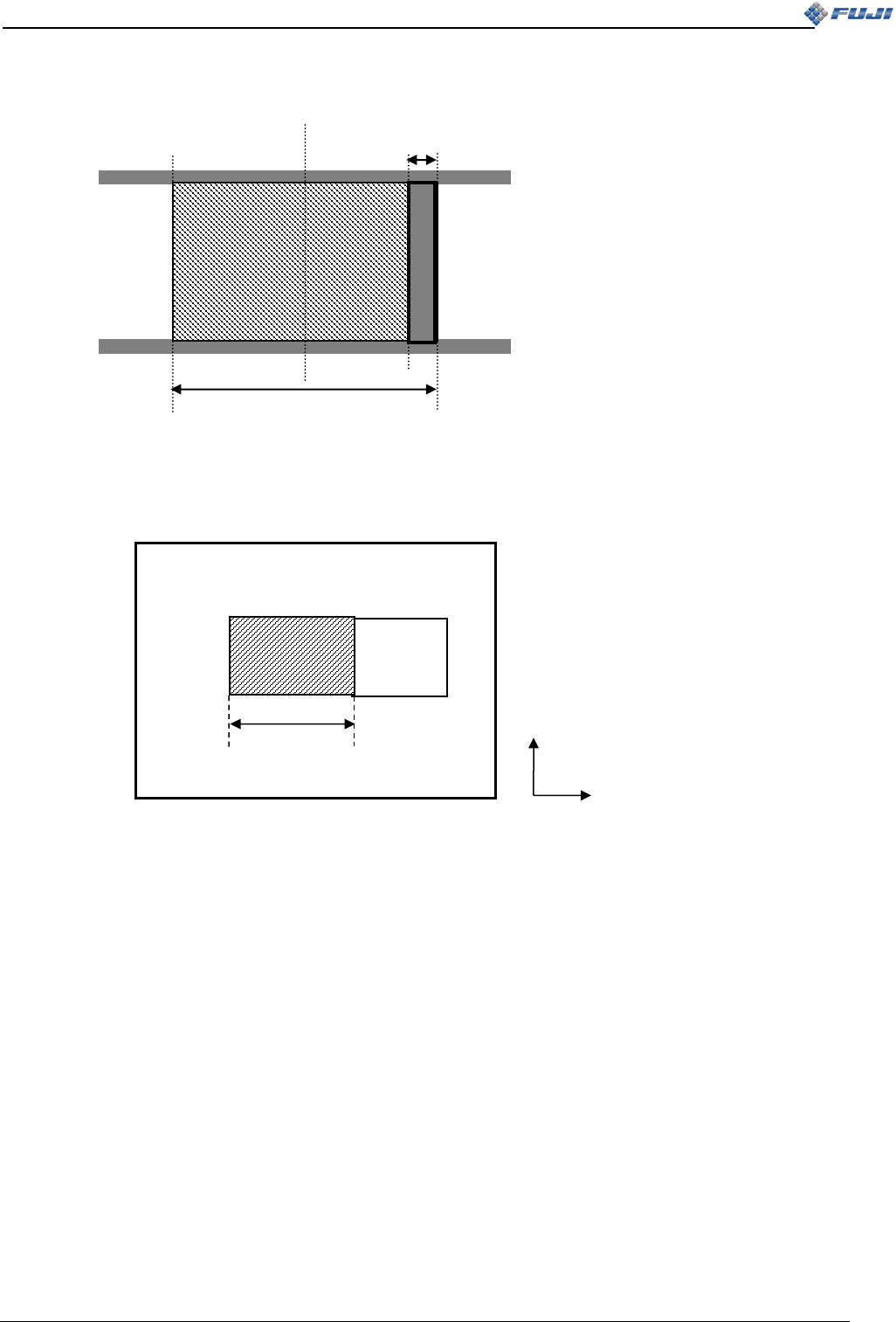
注意事项
・ 数据检查不能进行测定盲区的判定。
・
如果在盲区内设置测定点,则有可能无法测定或将元件面误判为电路板板面。
Y
X
1
电路板
元件
(高度
H mm)
测定盲区
H/1.6+0.45mm
<从属轨侧>
<基准轨侧>
最大电路板尺寸
9mm
测测定盲区
JJOC0djO
JJOC0djO
Downloaded at 2017/08/25 12:08:301 by 341B1639 DL#NsNk3jPS
-51- CNT-NXT-3/3c-04S
7. 本机支援
7.1 往返搬运轨
有NXT用往返搬运轨。
往返搬运轨有NXT依存型和自立型 2 种。
依存型自动变更搬运轨宽,自立型需要手动变更。
※有关搬运轨的详细规格请参照附件的「NXT用往返搬运轨规格说明书」。
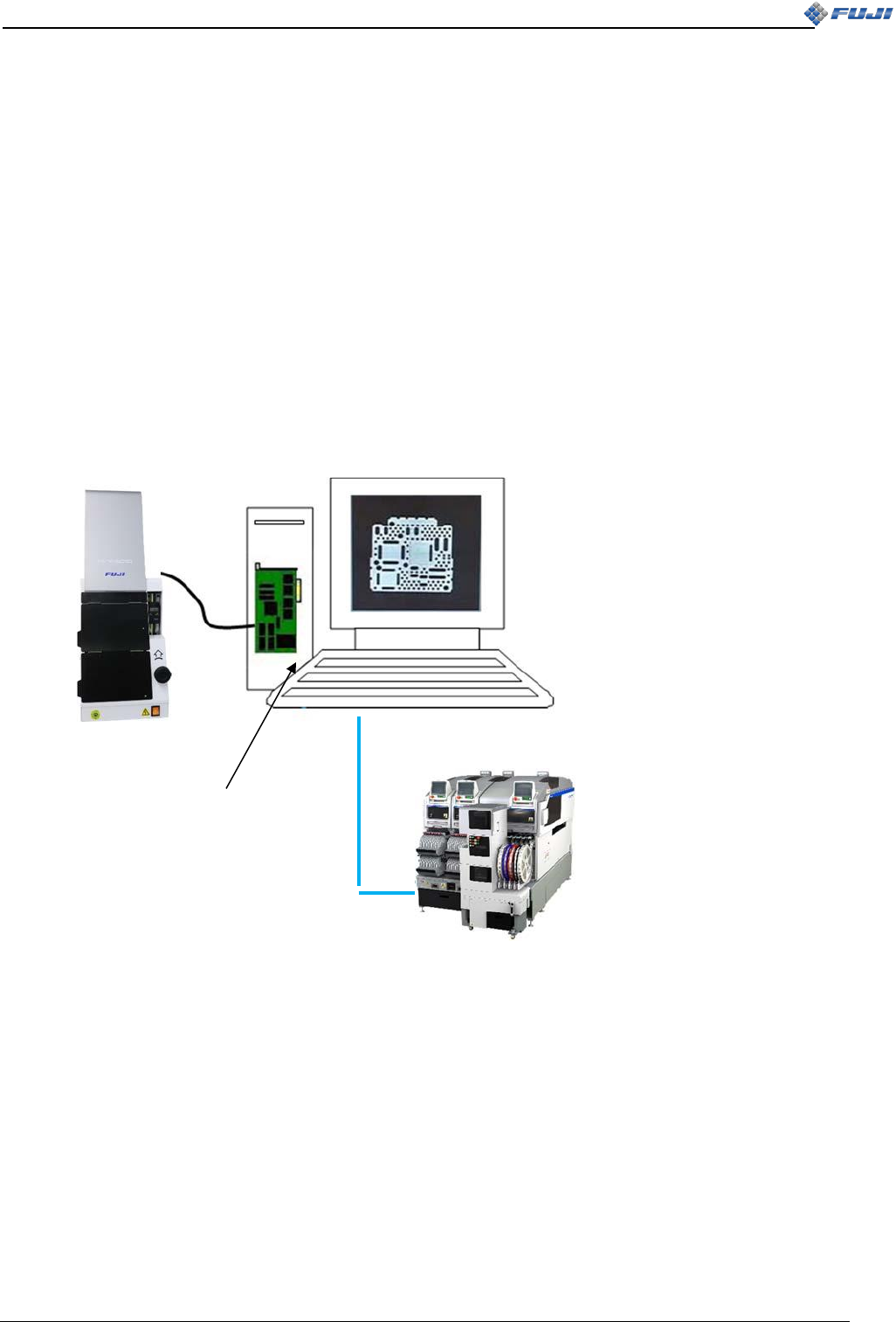
7.2 VPDplus
VPDplus 以从机器和相机平台读取的影像为基础,配置基本模块、创建影像处理数据。用鼠标决定大
致的位置后可自动向影像形状靠近,在键盘上输入正确的数值可创建料站数据。另外,VPDplus 使用
与机器上搭载的相同的影像处理算法,也可用编辑的数据进行影像处理。
主机
(Fuji Flexa、Job 编辑器)
影像取入板
JJOC0djO
JJOC0djO
Downloaded at 2017/08/25 12:08:301 by 341B1639 DL#NsNk3jPS
-52- CNT-NXT-3/3c-04S
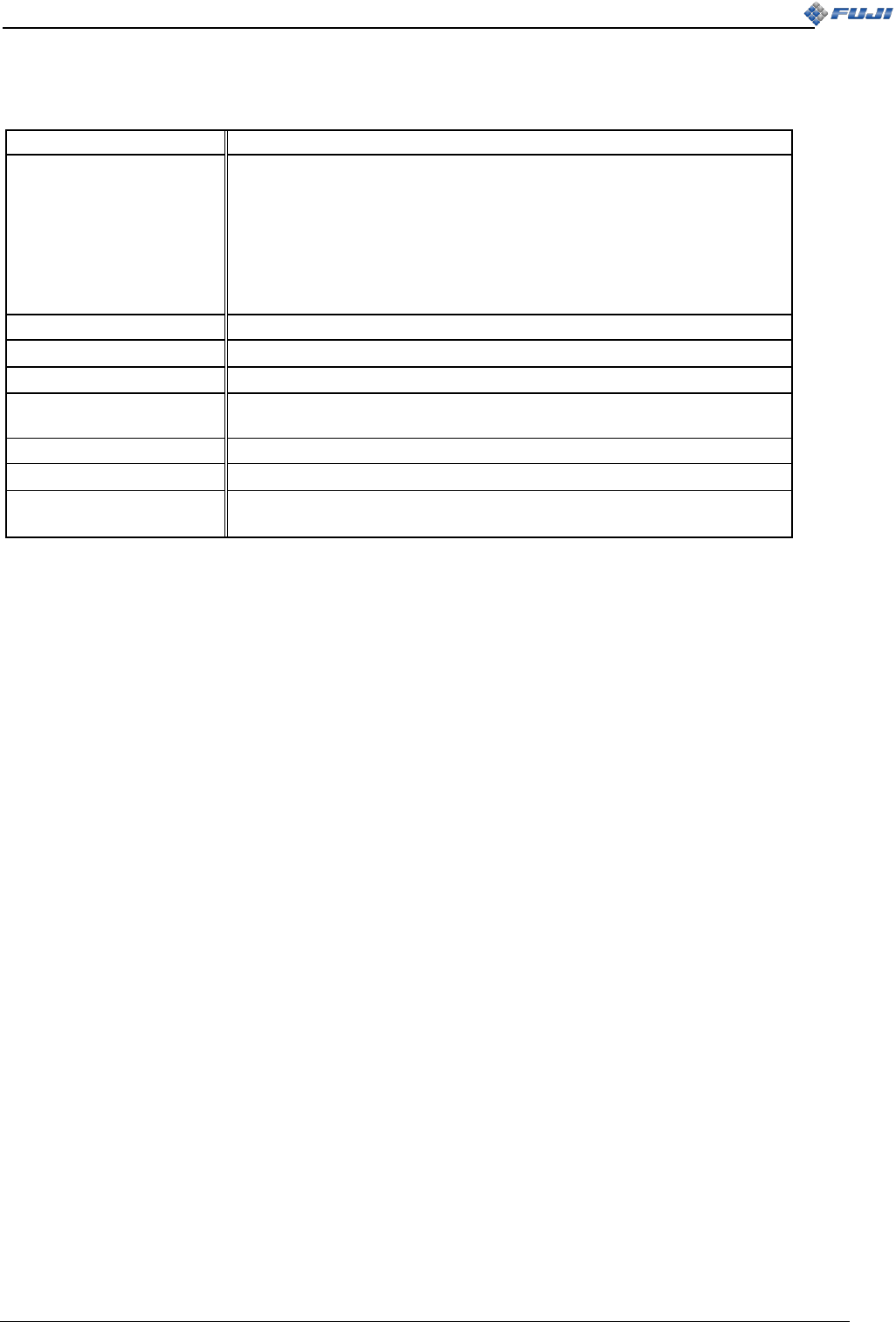
8. 控制
8.1 控制规格
项 目
规 格
控制轴数
X,Y,Z(Z1,Z2),Q, XS,R,TY,TZ,TZ1,TZ2 全 4~9 轴(根据模组/工作头
/料站类型有所不同)
※ XS 轴:M3-3 模组专用
R 轴: H24S / H24G / H24 / V12 / H12HS(Q) / H08(Q) /
H08M(Q)/H04FS/H04S/H04/DX 工作头专用
Z1,Z2 轴:DX 工作头专用
TY 轴,TZ1,TZ2 轴:料盘单元-LT/LTC 专用
最大输入 Sequence 数
6000Sequence/模组
最大输入定位点数
3505 定位点/Job
最大输入子电路板数
6000 子电路板/Job
输入数据方式(最小单位)
Fuji Flexa , Nexim
X,Y,Z 轴 0.01mm Q 轴 0.01°
通信功能
网络对应(以太网)
※
2
视觉识别补正
电路板位置偏移/元件吸取偏移
操作面板
・操作面板:机器上的操作
・管理面板:在另外的 PC 上操作
※
3
※1 通过Fuji Flexa或Nexim进行数据通信。
运用
Fuji Flexa和Nexim需要安装软件用的PC、和软件。请在机器进入工厂之前准备好安装软件用的PC。
※2. 请在机器进入工厂之前准备好以太网的网线。
(本公司推荐 100BASE-
T× cable 100m以内)
※3. 请在机器进入工厂之前准备好管理电脑用的PC。软件(NXT辅助软件 9.1 参照
)是本机器的标准附属品。
JJOC0djO
JJOC0djO
Downloaded at 2017/08/25 12:08:301 by 341B1639 DL#NsNk3jPS