ServiceManual_UR5_zh_3.2.6.pdf - 第103页
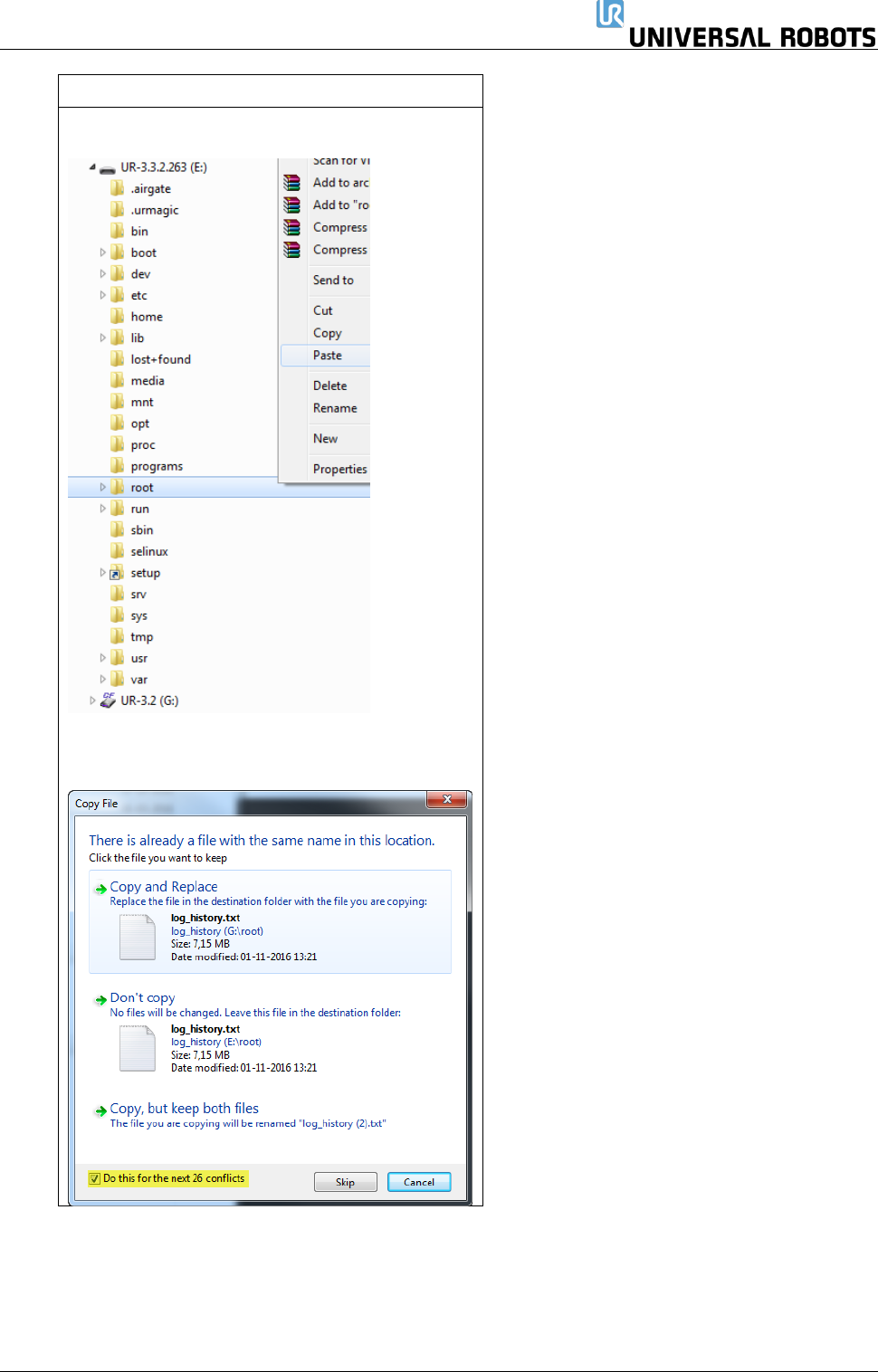
保留所有权利 103 Servicemanual_UR5 _en_3.2.6 CB3 导航到 UR -USB ,右键单击文件夹 根目录,然 后选择粘贴。 复制文件时将弹出提示 ,在提示中选择复制和 替换。 选中标记为黄色的复选 框。 2. 复制所有必需的文件。 UR -USB 现在可以插 入新的主机板并启动
保留所有权利 102 Servicemanual_UR5_en_3.2.6
CB3
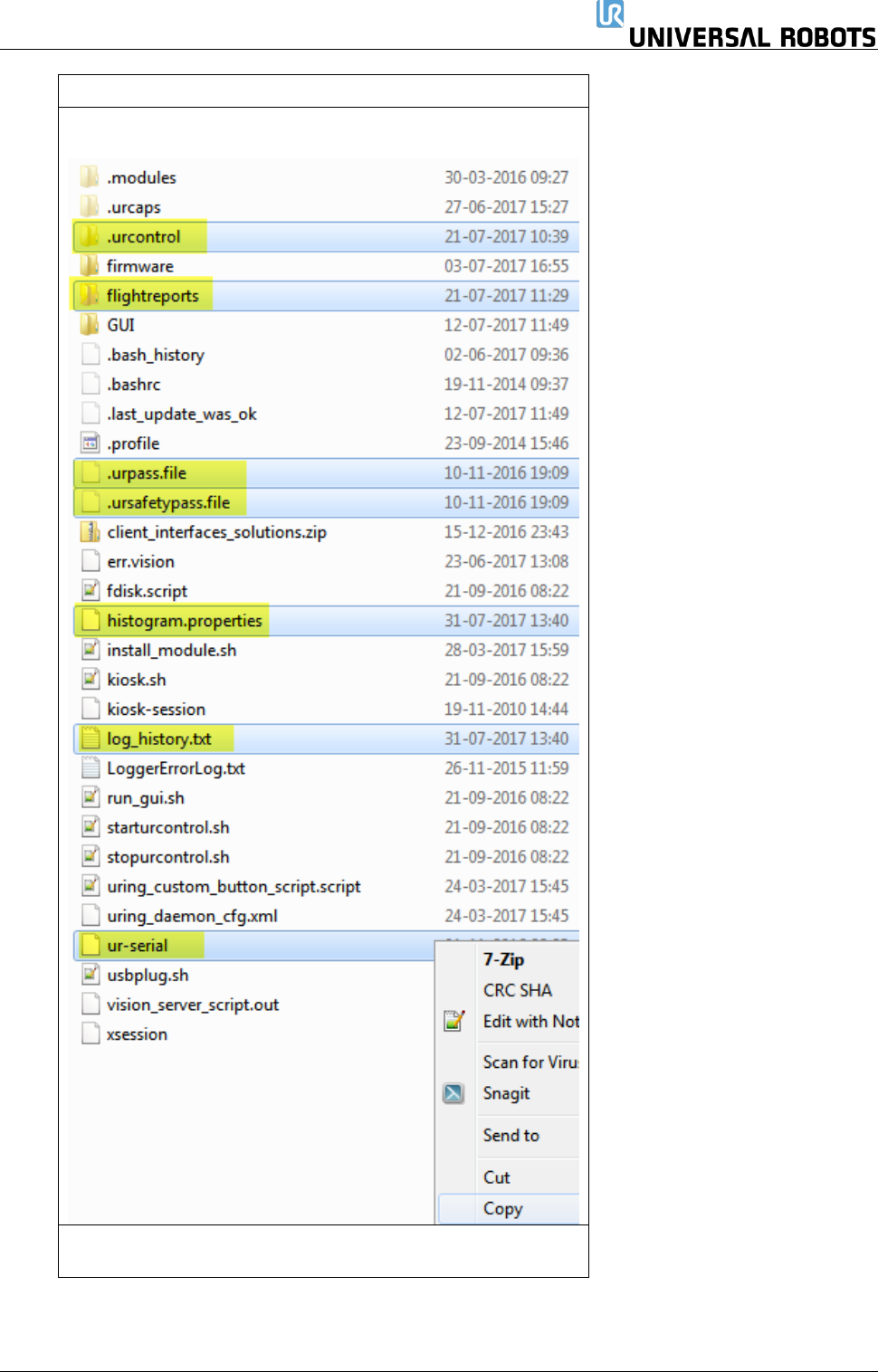
在根文件夹视图中,选择文件夹和以黄色突出显示的文
件,然后右键单击并选择复制。
如果 .urpass.file 或 .ursafetypass.file 在 CF 卡上不可见,则
不需要保存这些文件
保留所有权利 103 Servicemanual_UR5_en_3.2.6
CB3
导航到 UR-USB,右键单击文件夹根目录,然
后选择粘贴。
复制文件时将弹出提示,在提示中选择复制和
替换。
选中标记为黄色的复选框。
2. 复制所有必需的文件。UR-USB 现在可以插入新的主机板并启动
保留所有权利 104 Servicemanual_UR5_en_3.2.6
5.故障排除
在错误代码中,相同的事物使用了不同的单词:
• 在安全控制板上: 处理器 A = A uP = SafetySys1
• 在安全控制板上: 处理器 B = B uP = SafetySys2
故障排除章节中的缩写
PSU = 电源
PC = 控制器
使用支持日志阅读器 (SLR) 打开日志文件。
进入 www.universal-robots.com/support 下载支持日志读取器
5.1 错误代码
代码
错误描述
说明
如何修复
C0
无错误
C1
输出缓冲器过流错误
C1A1
存储警告的缓冲器过流
C1A2
RS485 的输出缓冲器过流(PC
消息出现问题)
C2
输入缓冲器过流错误
C3
处理器过载错误
任何部分的处理器都可能产生这个错
误。
C4
通信中断
a) 检查安全控制板与主机板之间的以太网电缆,检查脚
本或 UR+ 软件是否使安全控制板与主机板之间的通信过
载。
b)按照第 5.3.7 节执行完整的重启程序
c) 更新软件