ServiceManual_UR5_zh_3.2.6.pdf - 第73页
保留所有权利 73 Servicemanual_UR5 _en_3.2.6 • 如图所示,将新电源线 从 SCB 插入 CB 3.1 主机板。 • 旋上新端盖。请注意, 朝向控制器外侧的螺钉可 能难以到位。 • 安装安全控制板的新端 盖。 • 根据端盖子上的标签和 下面的照片,再次安装所 有连接器。 U 盘应该插入蓝色的 USB 端口。
保留所有权利 72 Servicemanual_UR5_en_3.2.6
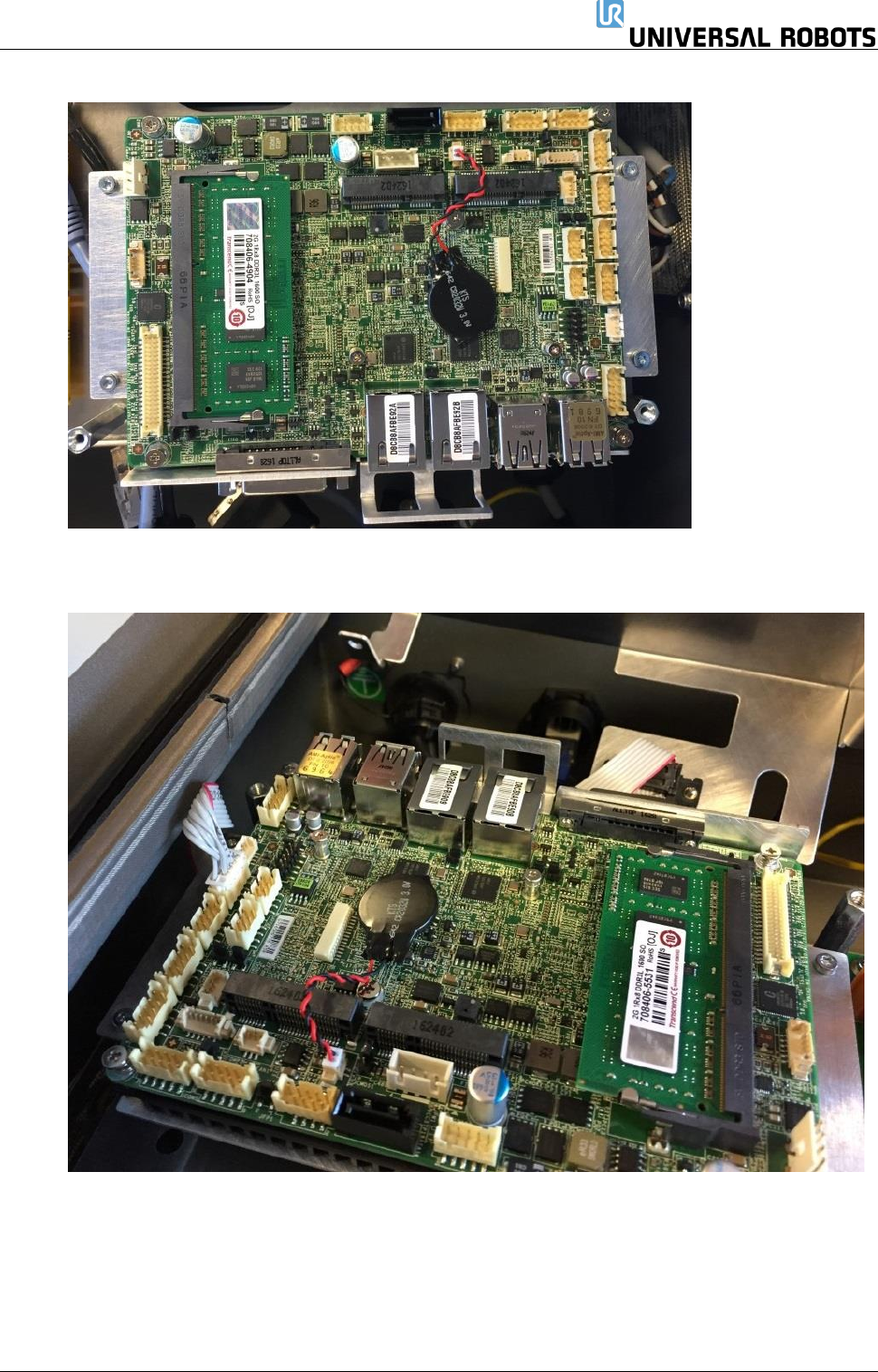
• 将主机板安装到支架上。请注意,朝向控制器外侧的两个螺钉可能很难就位。
• 现在拿起主机板的新端盖,通过主机板下面的扁型电缆找到连接器,如下图所示
保留所有权利 73 Servicemanual_UR5_en_3.2.6
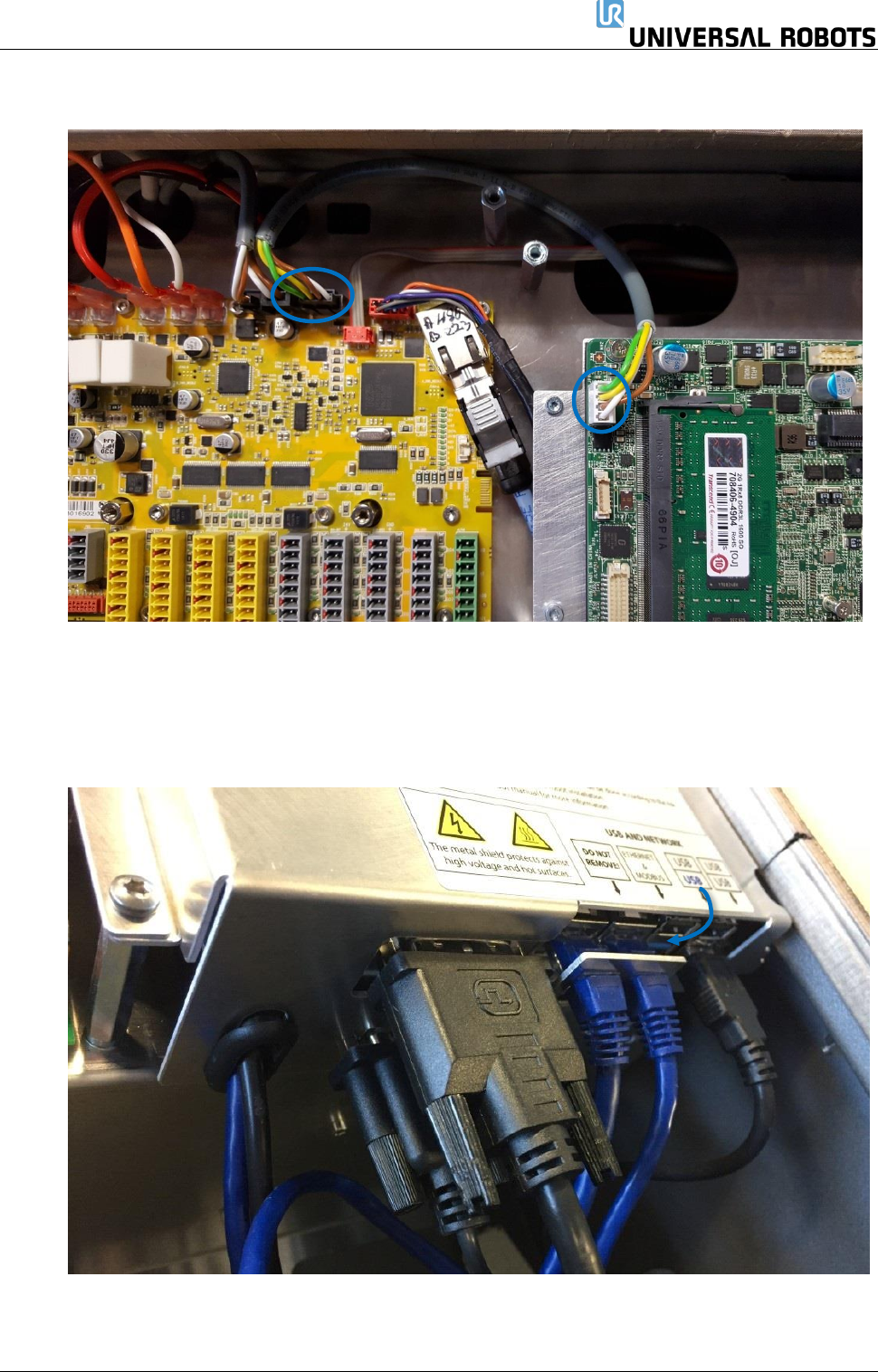
• 如图所示,将新电源线从 SCB 插入 CB 3.1 主机板。
• 旋上新端盖。请注意,朝向控制器外侧的螺钉可能难以到位。
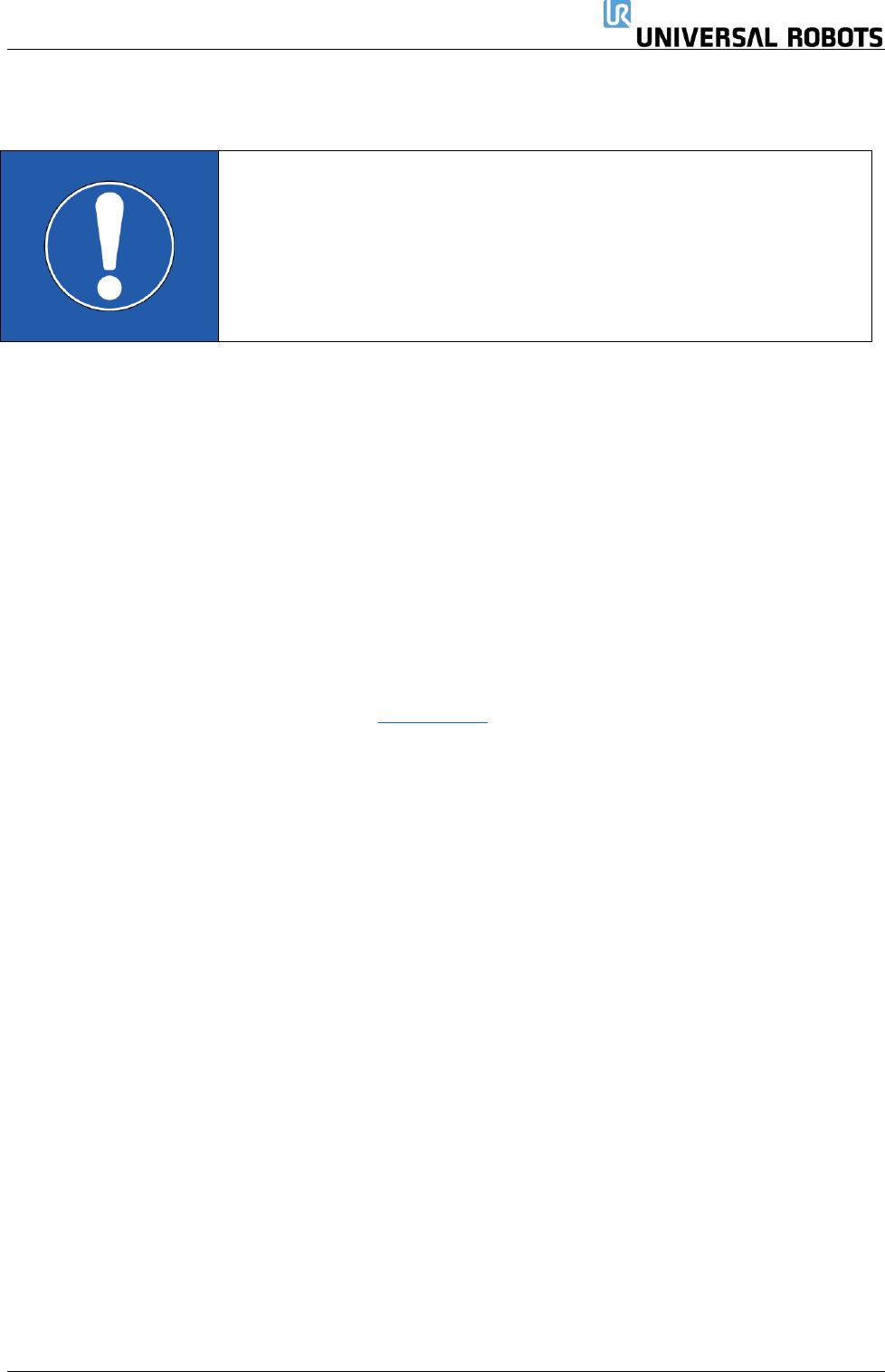
• 安装安全控制板的新端盖。
• 根据端盖子上的标签和下面的照片,再次安装所有连接器。
U 盘应该插入蓝色的 USB 端口。
保留所有权利 74 Servicemanual_UR5_en_3.2.6
3.2.3.2 软件
注意:
1. 请勿将带有 CB3.1 主机板的机器人降级到低于 3.1.1.7336 的软件版
本。否则,可能导致机器人出现意外的行为。
2. 优傲机器人对这一过程的结果不承担任何责任。
3. 本文件中的说明应被视为一般指引。假设集成商具有高水平的技
术知识
• 需要将以下文件从现有的小型闪存卡复制到新的 U 盘。
o root/ur-serial
o root/log_history.txt
o root/histogram.properties
o root/.urcontrol/urcontrol.conf
o root/.urcontrol/calibration.conf
o root/.urcontrol/calibration.log
o root/.urcontrol/robot_calibration_summary.txt
o 程序/[以下所有文件:.urp、.txt、.script、.installation、.variable,.old]
• 有关数据备份的详细描述,请参见 4.4 数据备份
• 如果旧的 CB 3.0 主机板有缺陷,请使用闪存卡读卡器,并安装 Linux 分区读取器,用于
Windows 读取闪存卡上的 Linux 分区。
• Polyscope 必须是最低软件版本 3.1.1.7336