ServiceManual_UR5_zh_3.2.6.pdf - 第43页
保留所有权利 43 Servicemanual_UR5 _en_3.2.6 3. 输入密码 lightbot ,并 按下 OK (确定) 。 4. 现在,您进入 E xpert Mode (专家模式) ,请按下 Low Level Cont rol (低级控 制)。 警告: 在 Low Level Control (低级控制)中,只有 Polyscope 装置选项卡中 的安全设置活动。 保护性停止 停用。 移动机器人前 ,将所有安全设 …

保留所有权利 43 Servicemanual_UR5_en_3.2.6
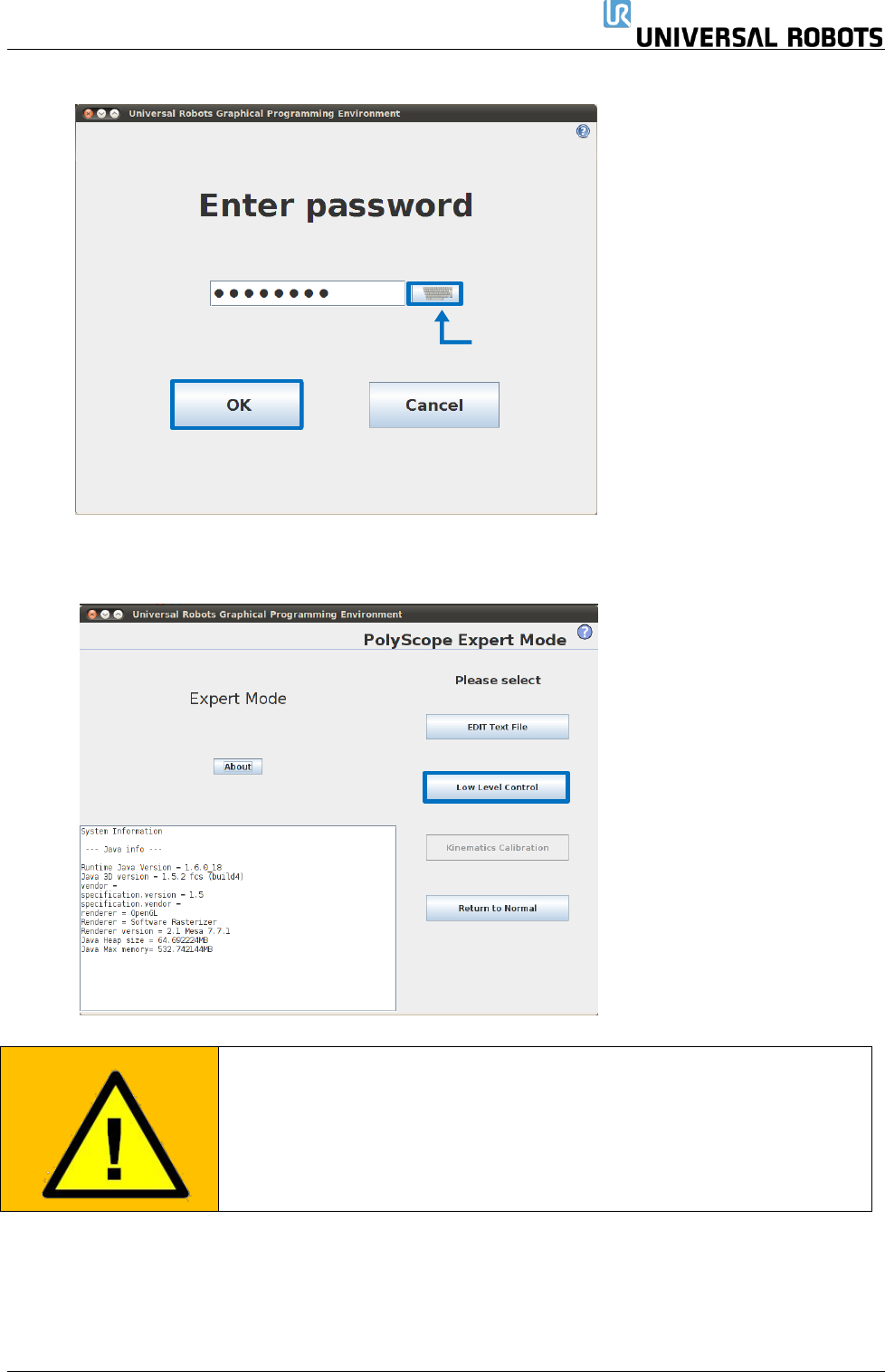
3. 输入密码 lightbot,并按下 OK
(确定)。
4. 现在,您进入 Expert Mode
(专家模式),请按下
Low Level Control
(低级控制)。
警告:
在 Low Level Control(低级控制)中,只有 Polyscope 装置选项卡中
的安全设置活动。 保护性停止停用。
移动机器人前,将所有安全设置置于最低设置。
lightbot

保留所有权利 44 Servicemanual_UR5_en_3.2.6
5. 按下 Turn power on (接通电源),为关节通电。
6. 按下 Go to Idle (进入闲置),将关节置于准备模式。