N7201A394C.pdf - 第195页
NPM-DGS 2D 检查编辑器 5.2 检查体系 EJS9AC-MB-05R-04 Page 5-5 ピボットセット Pivot 元件形状设计值 5.2.2 位置检查 位置检查是判定贴装坐标和贴装角度 是否正常的检查项目。 1. 概要 决定元件位置的方法为 : 以模板匹配为基本的元件识别处理方式 来找出画像上的元件。 所谓的模板匹配处理, 是指预先从拍摄的画像中将 需要查找对象 ( 元件 ) 数据登录为模板。 然后, 在 拍摄的画像中…
NPM-DGS
2D
检查编辑器
5.2
检查体系
Page 5-4 EJS9AC-MB-05R-04
2.
在
BOX
的
XY
坐标上,存在补正模式。
1)
补正
ON
模式
在这个模式下,将检查参数的
“BOX
坐标补正
”
设定为
“ON”
,补正模式即会转为
ON
。
在位置检查结果的基础上,通过坐标补正使元件坐标和
BOX
的位置关系转为相同后,执行检查。
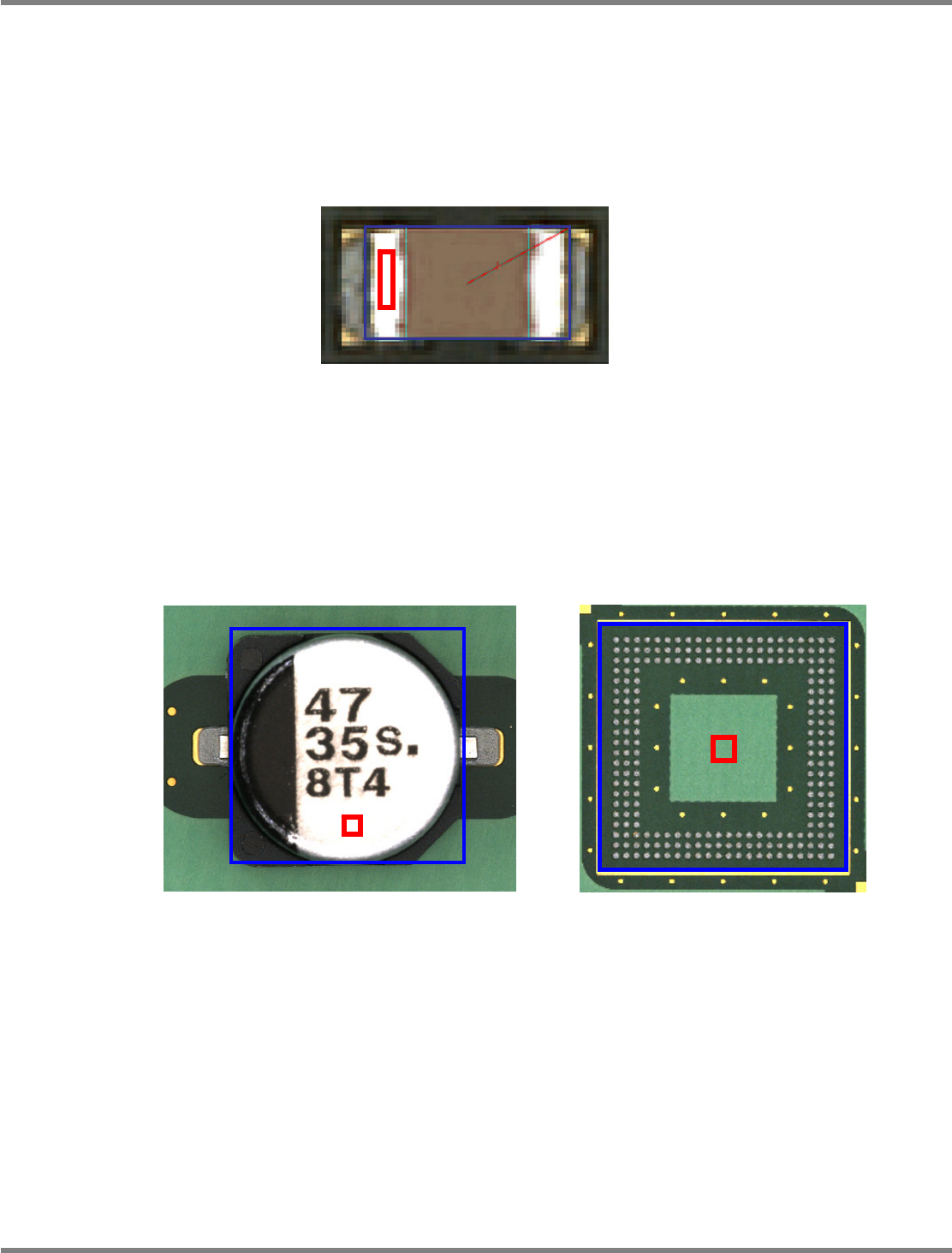
使用本模式,能够对元件上的任意领域执行颜色检查。
例如,在检查芯片元件时,如果在电极部上设定了
BOX
,那么为了防止电极不会因元件位置偏
移而偏离
BOX
,即可以将补正模式设定为
ON
。
2)
补正
OFF
模式
在这个模式下,即使检查参数的
“BOX
坐标补正
”
设定为
“OFF”
,补正模式也会转为
OFF
。
通过登录在检查数据中的
BOX
坐标来执行检查。在如下述①、②所示的两种情形下设定本模式。
①
元件的目标领域比
BOX
尺寸大,即使元件位置发生偏移,
BOX
也不会偏离目标领域的元件
的检查
;
②
通过抽出基板特定领域的颜色来执行检查的元件。例如,类似在包装等本体为黑色的元件,
元件的颜色与基板无护膜领域相同,由此会难以区分元件和基板。这时,通过有基板护膜的
领域或
PAD
等领域而能够明确区分元件和基板部位的基板存在。
BO
X
BO
X
例①
BO
X
例②
NPM-DGS
2D
检查编辑器
5.2
检查体系
EJS9AC-MB-05R-04 Page 5-5
ピボットセット
Pivot
元件形状设计值
5.2.2
位置检查
位置检查是判定贴装坐标和贴装角度是否正常的检查项目。
1.
概要
决定元件位置的方法为
:
以模板匹配为基本的元件识别处理方式来找出画像上的元件。
所谓的模板匹配处理,是指预先从拍摄的画像中将需要查找对象
(
元件
)
数据登录为模板。然后,在
拍摄的画像中搜索与模板相同的数据。通过评价值来决定模板是否相同。完全相同为
100%
、完全
不同为
0%
。在搜索范围下,将评价值最高的模板坐标视为元件存在的坐标。
在执行
2D
元件检查之际,模板匹配同时顾虑到元件的旋转,然后再决定元件的贴装位置和贴装角
度。
2.
模板
NPM
元件检查采取了独自的模板匹配算法
(PSM:Parts
Shape Matching)
。在模板数据上体现了
PSM
的这一特征。
一般的模板匹配方式是将所拍摄的画像数据原封不动地登录
为模板,然后通过之后所拍摄的画像进行匹配处理。
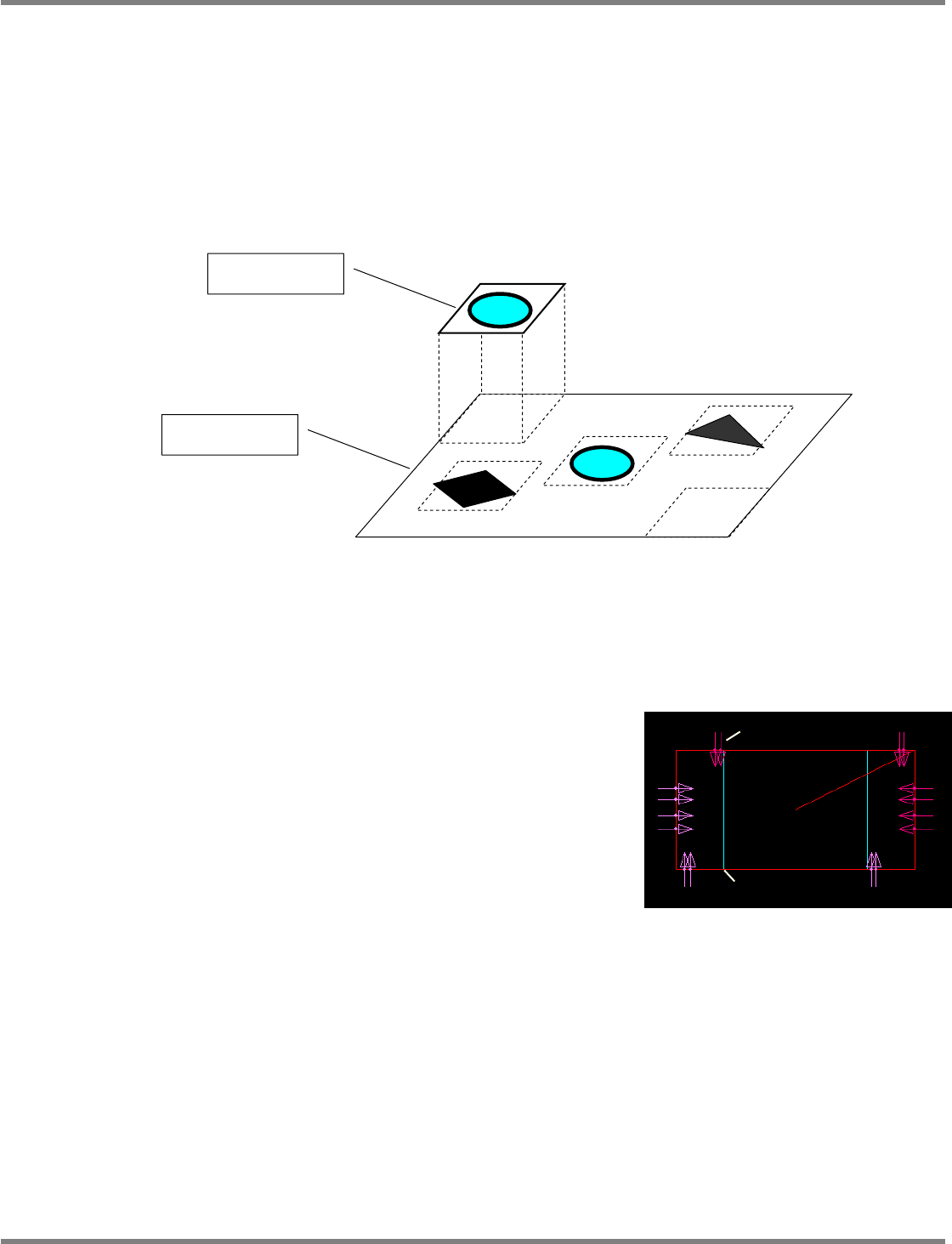
PSM
则通过复数的箭头状
Pivot
组来编制模板。这样可以达
到强化识别精度和识别处理时间的效果。
3. Pivot
Pivot
拥有长度和方向。
Pivot
由尖端到中间点明亮、中间点到末尾较暗这两种数据值所构成。将这
个
Pivot
设置到元件和基板境界领域,且明亮度变化明显的部位
(
边缘领域
)
,即能够编制识别元件
所需的
Pivot
组。
例如,在芯片元件的模板下,拍摄贴装在基板上的芯片元件时,因电极较亮,而其下的焊膏领域相
对电极来讲显得过暗,因此需要将
Pivot
配置到电极领域上。
模板
拍摄的画像
NPM-DGS
2D
检查编辑器
5.2
检查体系
Page 5-6 EJS9AC-MB-05R-04
4.
搜索范围
移动模板,来搜索元件的范围
(
搜索范围
)
,这个范围在检查参数的
“
元件偏移判定值
”
和
“
识别区域补
偿值
”
加上元件外形领域后的尺寸范围内。这时的元件偏移判定值有警告值和
NG
值两种,适用设
定较小的值。
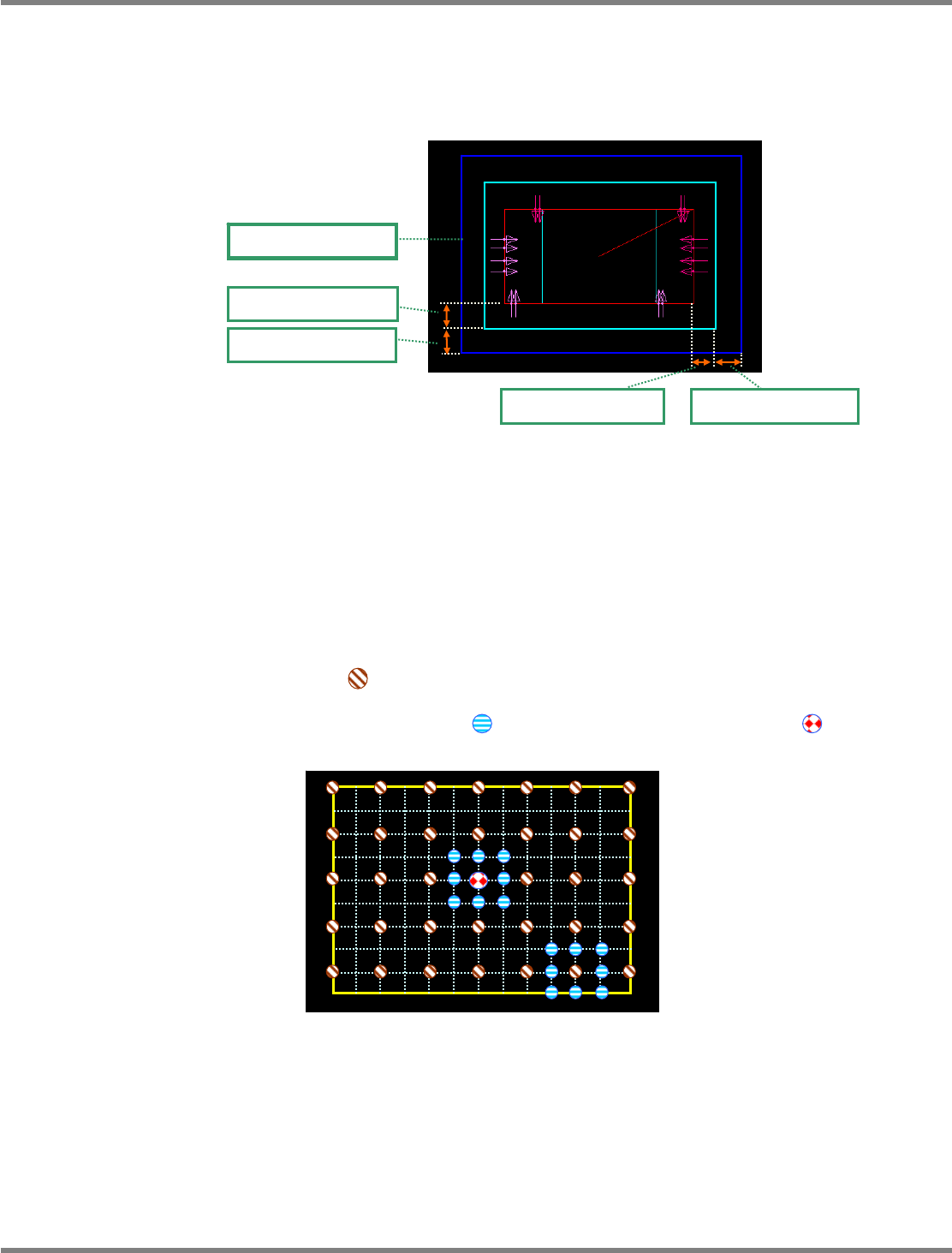
5.
搜索步骤
通过阶段性变更来执行模板移动步骤
(
搜索步骤
)
。
首先,通过在检查参数的
“
搜索步骤
XY”
所设定的值来移动
Pivot
组,同时计算各坐标的评价值。
接着,在搜索范围内,判定高评价值坐标,然后决定下一个执行搜索的坐标的复数搜索基点。
然后,将搜索步骤变更为上一次的
1/2
,在上述的复数搜索基点的基础上,计算周围
9
点的评价值,
并从全部评价值中判断出高评价值的坐标,以此决定下一个复数的搜索基点。一直执行本处理直到
搜索步骤转为
1
。并将在搜索步骤
1
中的最高评价值坐标
(
包含角度
)
判定为元件坐标。
在这里对搜索步骤从
“2”
开始之际的处理概要进行说明。
首先,在搜索步骤
2
,通过
的点数计算评价值,并判定评价值较高的坐标,然后决定下一个
搜索基点。
接着,在决定的搜索基点下,求算周围
9
点
的坐标评价值,并决定评价值最高坐标
的元
件贴装位置和角度。
元件偏移判定值 Y
识别区域补偿值
搜索范围
元件偏移判定值 X 识别区域补偿值