N7201A394C.pdf - 第199页
NPM-DGS 2D 检查编辑器 5.2 检查体系 EJS9AC-MB-05R-04 Page 5-9 5.2.3 正反反转检查 正反反转检查是判定元件正反是否正 确的检查项目。 正反反转检查,通过确认预先登录在 检查参数中的 BOX( 矩形 ) 内的颜色来判定元件的正反状态。 在检查参数的 LUT 中设定元件背面的颜色。 通过个别 LUT 来编制并设定 LUT 。 在 BOX 内,通过抽出元件的背面颜色领 域的计数,来执行判定。 判定…
NPM-DGS
2D
检查编辑器
5.2
检查体系
Page 5-8 EJS9AC-MB-05R-04
7.
编制
Pivot
的详细方法
1) Pivot
组由设定复数个被称为
Pivot
的箭头形状的线编制而成。
2) Pivot
被分为两个组。所设定的
Pivot
必须从属于组。
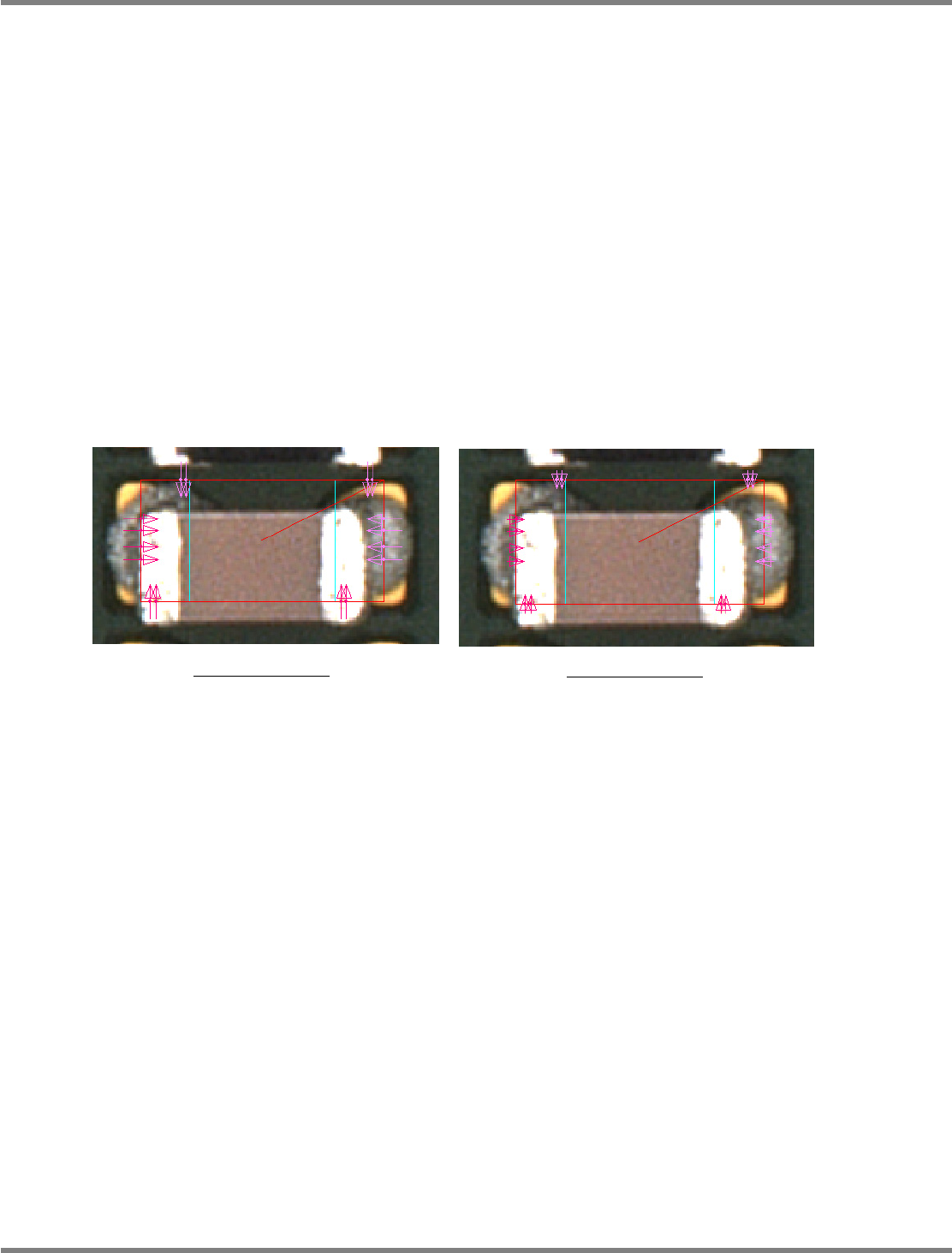
3)
在画像上的明亮度变化明显的部位上设定
Pivot
。
标准设定为
:
设定到元件尺寸设计值的元件境界位置上,这时
Pivot
中心对准元件境界。
4)
能够在画像上确认引线部
(
电极
)
的元件,将
Pivot
设定到引线上。
这是因为引线部
(
电极
)
比其他部分明亮,而周围的焊膏显得较暗。这一特点比较适合用来进行识
别处理。如果属于看不到引线的元件,将
Pivot
设定到元件本体和基板明暗有差别的部位。
5)
至于
Pivot
的朝向,请将箭头设定为由暗处指向明亮处。这时,箭头的前方意味着明亮。请注意
:
如果按照相反方向设定箭头,有可能会导致识别失败。
6)
针对一个元件,需要设定粗识别和精识别所需的
2
个
Pivot
组。粗识别和精识别的数据差异基本
上在于
Pivot
长度。通常,复制在粗识别所编制的
Pivot
来用于粗识别,并将
Pivot
尺寸设定为
粗识别中
(M)
尺寸、精识别小
(S)
尺寸。
7) Pivot
组最多能够登录
3
组粗识别和精识别
Pivot
。当元件尺寸的变动过大,无法以一个形状来对
应之际,执行登录。最初以主登录形状执行识别动作,如果评价值比阈值低,即用副
1
或副
2
的形状来执行识别。请注意
:
如果频繁使用副
1
和副
2
的数据,识别处理时间会变长,从而导致
TACT TIME
的延迟。
8)
数据示例
(1005C)
8.
步长搜索
在步长搜索下,通过两个阶段的搜索处理对元件进行识别。
在第一个步骤下,限定搜索角度后搜索元件。限定搜索角度所需的参数为
‘
步长搜索用初始搜索角
度
’
。当通过第一个步骤判断到元件的贴装正确时,将结束搜索处理。被判断为正确贴装的参数即
为
‘
步长搜索用初始搜索判定值
’
。需要对初始搜索判定值设定较高的值。如果在这里设定了较小的
阈值,那么当贴装不正确时也将被判断为
OK
,因此在设定之际需要加以注意。
因为大多数元件都被贴装到正确的位置,因此通过本步长搜索的处理,可缩短检查时间。
只有在第一个步骤下没有找到元件时,实施第二个步骤的全部角度搜索,并进行与以往相同的检查。
粗识别用 Pivot 组
(
Pivot 尺寸: 中
(
M
))
精识别用 Pivot 组
(
Pivot 尺寸: 小
(
S
))
NPM-DGS
2D
检查编辑器
5.2
检查体系
EJS9AC-MB-05R-04 Page 5-9
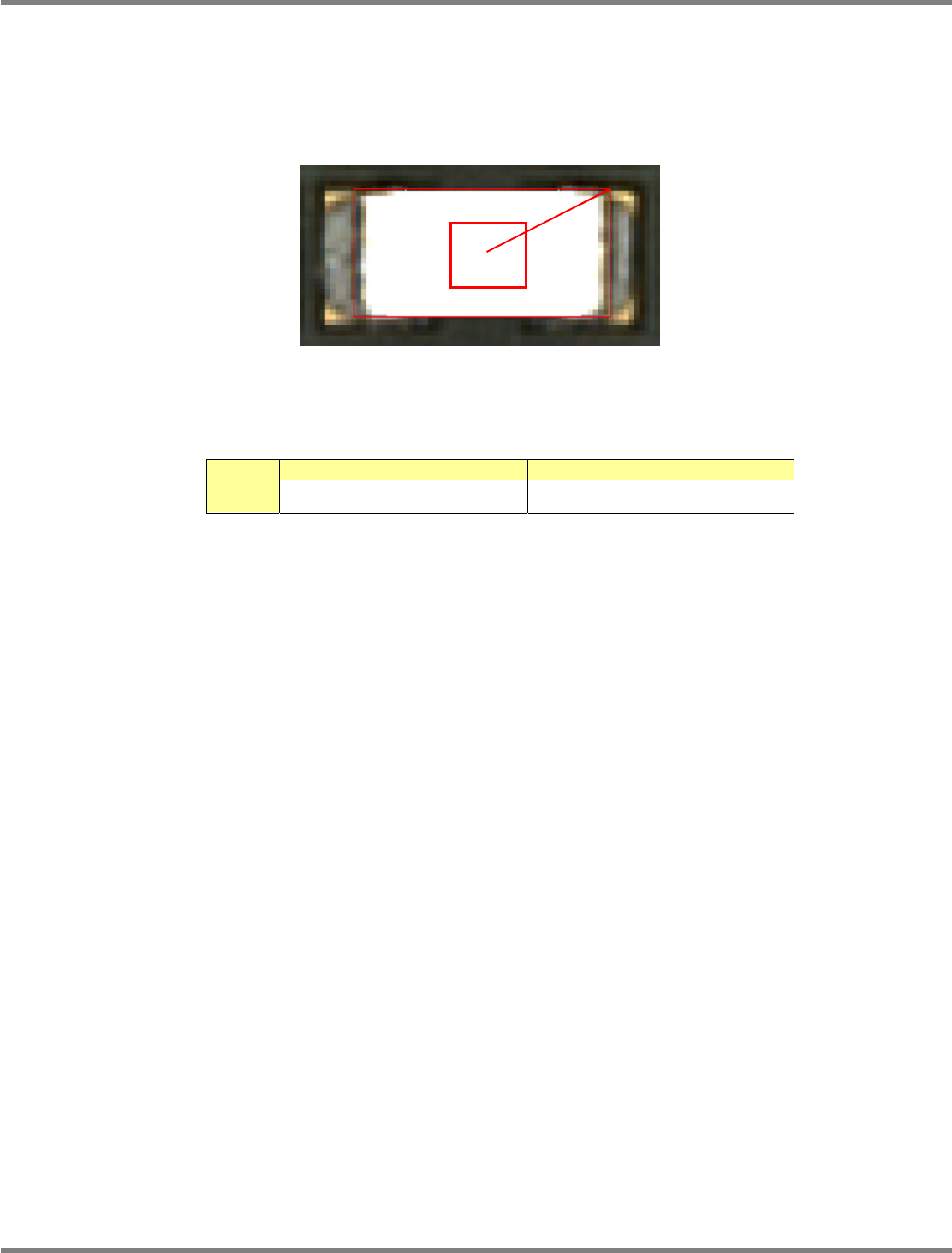
5.2.3
正反反转检查
正反反转检查是判定元件正反是否正确的检查项目。
正反反转检查,通过确认预先登录在检查参数中的
BOX(
矩形
)
内的颜色来判定元件的正反状态。
在检查参数的
LUT
中设定元件背面的颜色。
通过个别
LUT
来编制并设定
LUT
。
在
BOX
内,通过抽出元件的背面颜色领域的计数,来执行判定。
判定
OK NG
元件背面面积
<
阈值
元件背面面积
≧
阈值
为了能够经常保持与元件坐标相同的位置关系,在位置检查结果的基础上,补正
BOX
坐标,并使用补正
后的
BOX
坐标来执行颜色检查。
BOX
NPM-DGS
2D
检查编辑器
5.2
检查体系
Page 5-10 EJS9AC-MB-05R-04
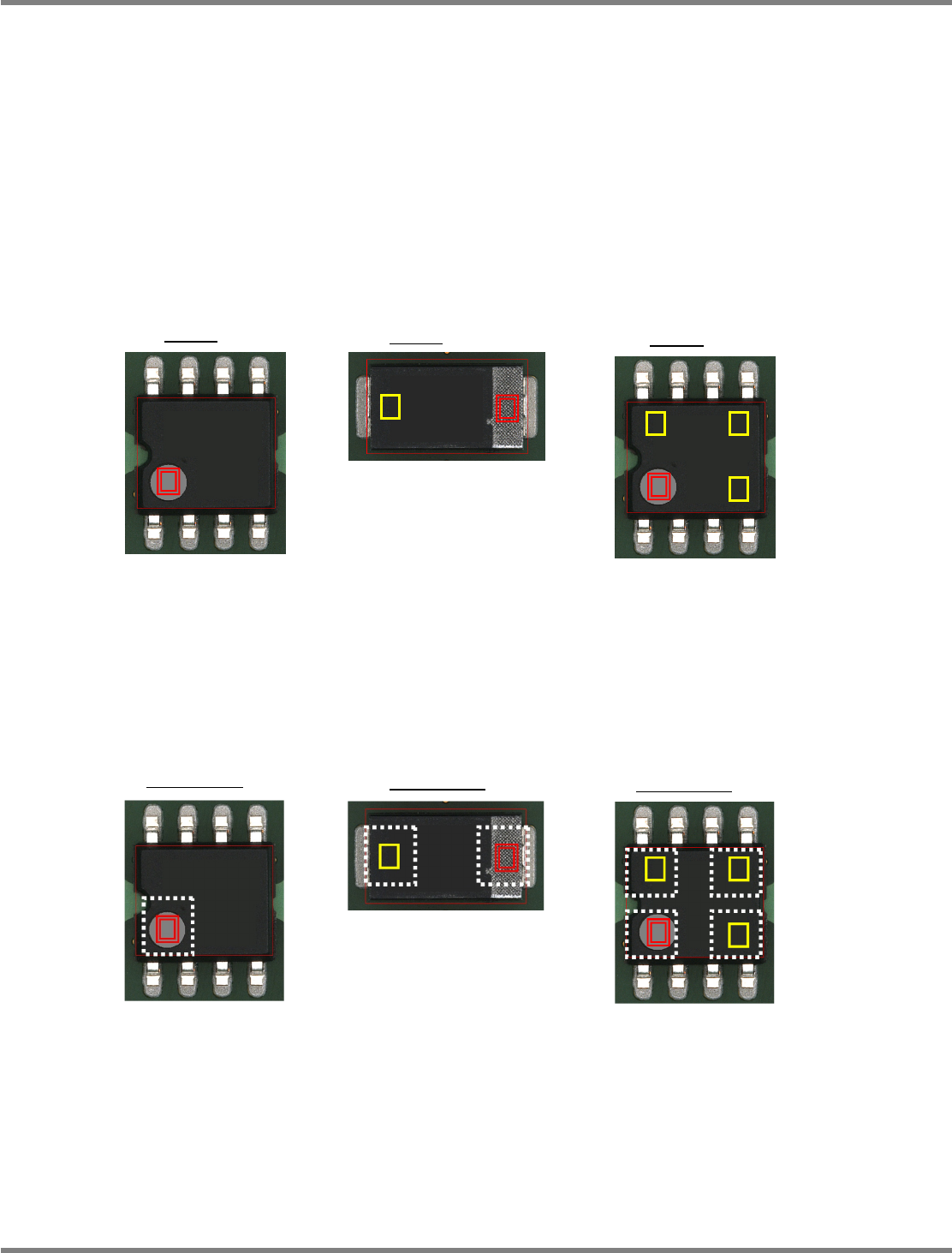
5.2.4
极性检查
极性检查是判定极性状态是否正确的检查项目。
1.
种类
极性检查有两种检查方式。
1)
极性检查
(
标准模式
)
2)
极性检查
(
搜索模式
)
1)
极性检查
(
标准模式
)
通过确认事先登录在检查参数中
BOX (
矩形
)
内的颜色判定元件的极性状态。
存在
BOX
数量为
1
个的
BOX
、
2
个的
2BOX
和
4
个的
4BOX
三种类型。
以设定在极性领域中的
BOX
为基准而设定。在基准
BOX
内,如果抽出了极性领域,即判断为合格。
2)
极性检查
(
搜索模式
)
搜索模式是在搜索范围内反复执行标准模式检查,然后通过最大值来判定元件的极性。在
2BOX
和
4BOX
的情形下,通过移动使各
BOX
的相对位置关系转为相同。
BOX
数量分为一个的
1BOX (
搜索
)
、两个的
2BOX (
搜索
)
、
4
个的
4BOX (
搜索
)
等三种类型。
(
下图中
的虚线即为搜索范围
)
1BOX
基准
2BOX
基准
4BOX
基准
1BOX (搜索)
2BOX (搜索)
4BOX (搜索)