00197908-03_UM_X-Serie-S_CS.pdf - 第129页
Provozní návod SIPLACE, ř ada X 3 Technické údaje a konstruk č ní skupiny Od verze softwaru 710.0 Vydání 12/2016 3.5 Osazovací hlava 129 3 Obr . 3.5 - 2 Hlava SIPLACE SpeedSt a r – funk č ní skupiny – č ást 2 (1) Kamera …
3 Technické údaje a konstrukční skupiny Provozní návod SIPLACE, řada X
3.5 Osazovací hlava Od verze softwaru 710.0 Vydání 12/2016
128
3.5 Osazovací hlava
3.5.1 Hlava SIPLACE SpeedStar C&P20 pro osazování v režimu High Speed
3
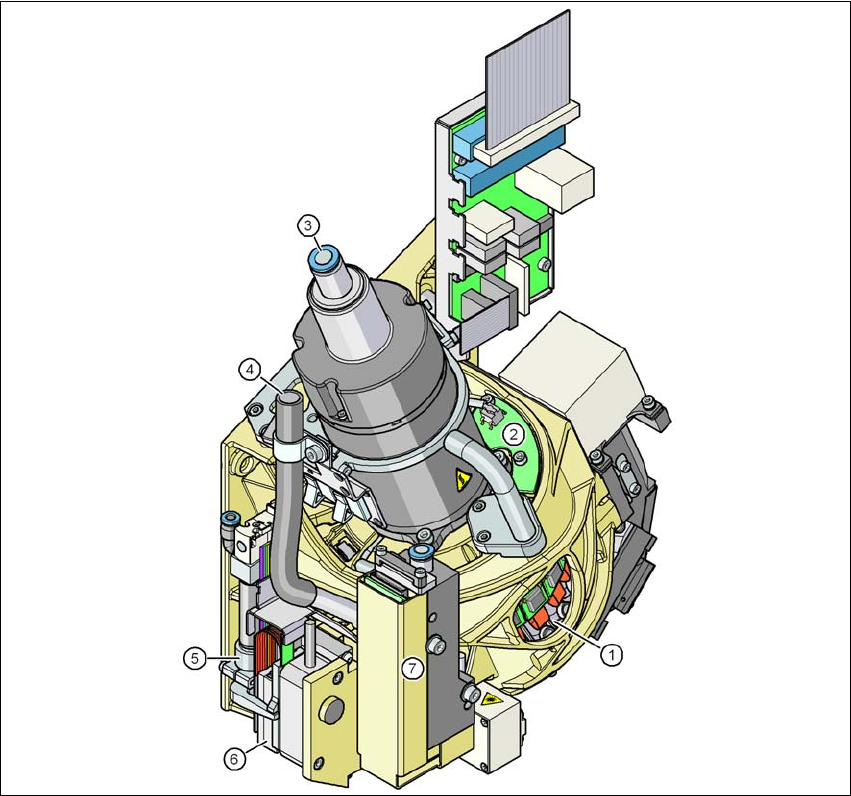
Obr. 3.5 - 1 Hlava SIPLACE SpeedStar - funkční skupiny - část 1
(1) Pohon DP, 20 pohonů
(2) Deska senzoru vakua pro přidržovací okruh
(3) Přípojka stlačeného vzduchu pro 20 Venturiho trysek odebíracího/osazovacího a přidržova-
cího obvodu
(4) Vedení odpadního vzduchu od tlakového regulačního ventilu (7)
(5) Válec vratné jednotky
(6) Motor Z (lineární motor)
(7) Tlakový regulační ventil
Provozní návod SIPLACE, řada X 3 Technické údaje a konstrukční skupiny
Od verze softwaru 710.0 Vydání 12/2016 3.5 Osazovací hlava
129
3
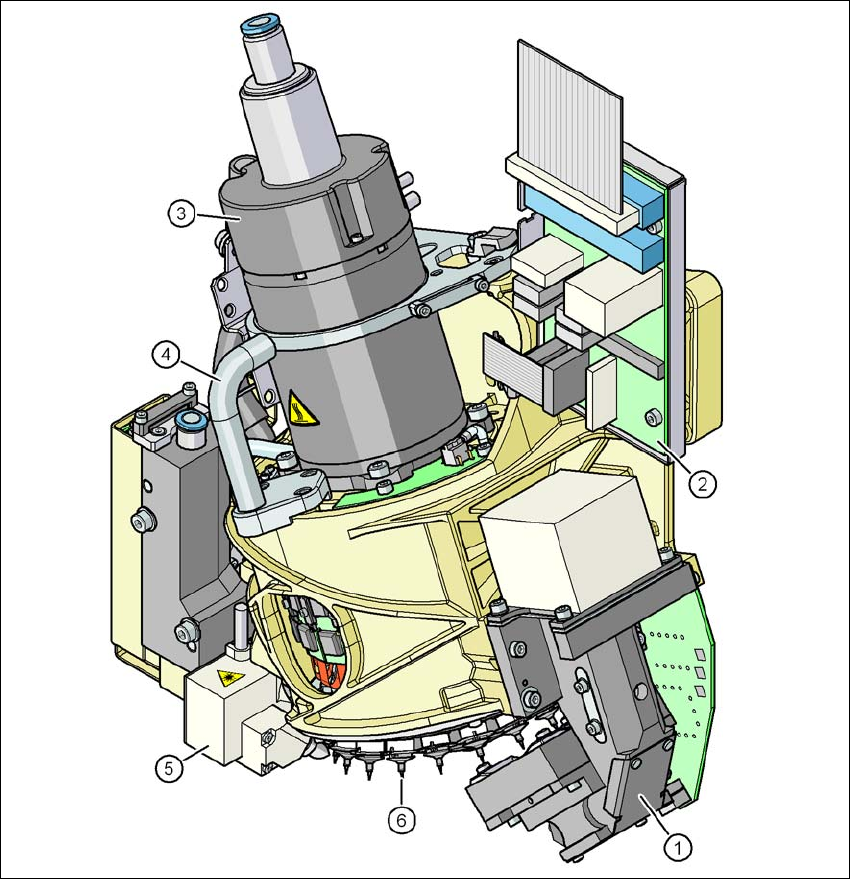
Obr. 3.5 - 2 Hlava SIPLACE SpeedStar – funkční skupiny – část 2
(1) Kamera součástek C&P, typ 23, 6 x 6, digitální
(2) Deska mezilehlého rozdělovače
(3) Hvězdicový motor
(4) Rukojeť
(5) Senzor součástek
(6) Hvězdice s 20 pipetami
3 Technické údaje a konstrukční skupiny Provozní návod SIPLACE, řada X
3.5 Osazovací hlava Od verze softwaru 710.0 Vydání 12/2016
130
3.5.1.1 Popis
Hlava SIPLACE SpeedStar (C&P20) pracuje na principu Collect&Place, tzn., že během jednoho
cyklu je z osazovací hlavy odebráno 20 součástek. Senzor součástek kontroluje na osazovací/
odebírací pozici, zda byla pipetou zachycena součástka. Na cestě k osazovací pozici jsou sou-
částky opticky centrovány a natočeny do potřebné osazovací polohy. Potom součástku za pomoci
ofukovacího vzduchu osadí jemně a přesně na desku tištěných spojů.
Pomocí osazovací hlavy C&P20 se podařilo značně zvýšit výkon osazovací hlavy a tím současně
osazovacího automatu. Kompaktní konstrukce hlavy C&P20 umožňuje velmi krátké časy cyklu.
Při tom je hvězdicová osa šikmo vzhledem k rovině desek. Pomocí takové geometrie lze uspořá-
dat segmenty v nejmenším prostoru.
Kamera součástek je ovšem v hlavě C&P20 i nadále integrována. To umožňuje úsporu pojezdů
k externí centrovací kameře. Mimo to má každý segment vlastní pohon DP pro rotaci pipety. Pi-
pety proto nemusí být již natáčeny do správné polohy v jediné stanici hlavy. Mohou být natáčeny
do správné osazovací polohy vždy a navzájem nezávisle.
Každý segment má svou vlastní vývěvu. Časy přepnutí mezi vakuem a ofukováním lze tak
značně zkrátit. Kromě toho může být v p
řidržovacím okruhu provedena kontrola vakua pro každou
jednotlivou pipetu.
Pohon osy Z segmentu je realizován pomocí lineárního motoru s lineárním odměřováním a je tak
nadmíru přesný. V odebírací/osazovací pozici pohybuje pohon Z segmenty ve svislém směru dolů
nebo nahoru.