00197908-03_UM_X-Serie-S_CS.pdf - 第145页
Provozní návod SIPLACE, ř ada X 3 Technické údaje a konstruk č ní skupiny Od verze softwaru 710.0 Vydání 12/2016 3.5 Osazovací hlava 145 P ř i stanovení montážní polo hy dbe jte následujících pravide l: Výška hlavy mu …
3 Technické údaje a konstrukční skupiny Provozní návod SIPLACE, řada X
3.5 Osazovací hlava Od verze softwaru 710.0 Vydání 12/2016
144
3.5.6.1 Popis
Hlava MultiStar spojuje dvě protikladné vlastnosti, jako jsou vysoký výkon osazování a vysoká fle-
xibilita. V případě malých součástí do 27 mm x 27 mm pracuje MultiStar metodou Collect&Place,
tzn. s vysokým výkonem osazování. Přitom jsou součástky opticky centrovány pomocí integro-
vané kamery součástek. V případě velkých součástek do 50 mm x 40 mm pracuje osazovací
hlava metodou Pick&Place, při které se součástky opticky centrují pomocí stacionární kamery.
Pro kombinaci obou metod osazování C&P a P&P byl vytvořen název MultiStar. Je krátce ozna-
čovaná jako hlava CPP.
12 segmentů hlavy CPP je uspořádáno hvězdicově. Momentový motor s velkým kroutícím mo-
mentem otáčí hvězdicí okolo horizontální osy - hvězdicové osy.
Každý segment má vlastní pohon DP pro rotaci pipety. Pipety proto nemusí být již natáčeny do
správné polohy v jediné stanici hlavy. Mohou být natáčeny do správné osazovací polohy vždy a
navzájem nezávisle.
Každý segment má svou vlastní vývěvu. Časy přepnutí mezi vakuem a ofukováním lze tak značně
zkrátit. Kromě toho může být v přidržovacím okruhu provedena kontrola vakua pro každou jednot-
livou pipetu.
Pohon osy Z segmentu je realizován pomocí lineárního motoru s lineárním odměřováním a je tak
nadmíru přesný. V odebírací/osazovací pozici pohybuje pohon Z segmenty ve svislém směru dolů
nebo nahoru.
Jako u všech hlav SIPLACE Collect&Place je digitální kamera sou
částek integrována na osazo-
vací hlavě. Vynechání posuvu pro optické centrování součástek přispívá k velké rychlosti zpraco-
vání.
Senzor součástek na spodní straně osazovací hlavy měří součástky na odebírací/osazovací po-
zici. Pro každý pohyb osy Z lze provést na špičce pipety měření a zjistit, zda součástka přilnula k
pipetě a jak je součástka vysoká.
3.5.6.2 Montážní polohy hlavy SIPLACE MultiStar
Hlava CPP může být na držáku hlavy namontována ve dvou různým pozicích:
– Hlava MultiStar v horní montážní poloze
V této pozici lze zpracovávat všechny součástky do velikosti o 50 mm x 40 mm a výšky do
11,5 mm. 3
– Hlava MultiStar v dolní montážní poloze
V této pozici osazuje hlava CPP součástky do velikosti o 27 mm x 27 mm a výšky o 6 mm
metodou Collect&Place. 3
Provozní návod SIPLACE, řada X 3 Technické údaje a konstrukční skupiny
Od verze softwaru 710.0 Vydání 12/2016 3.5 Osazovací hlava
145
Při stanovení montážní polohy dbejte následujících pravidel:
Výška hlavy musí být v jedné osazovací oblasti pro všechny osazovací hlavy stejná.
Instalujte hlavu CPP vždy do horní montážní polohy, pokud je kombinovaná s následujícími
konstrukčními skupinami:
– Stacionární kamera součástek
– Matrix Tray Changer
– Hlava TwinStar
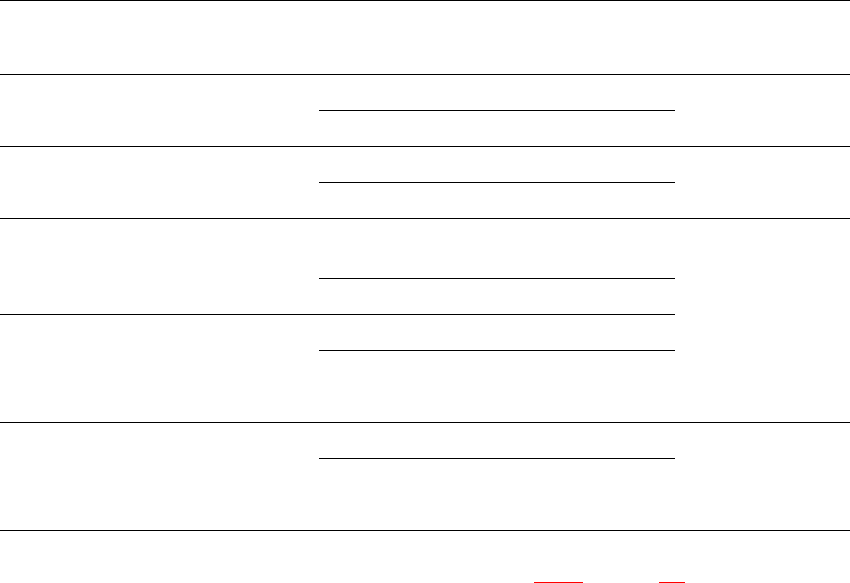
3.5.6.3 Klasifikace spektra zpracovávaných součástek
3
Třída
součástek
Velikost
součástek
Montážní poloha
*a
hlavy CPP
Výška
součástek
Typ kamery
součástek
Malá součástka
K_BE
01005-
27 mm x 27 mm
Nahoře Do 8,5 mm
Kamera hlavy,
typ 30
Dole Do 6,0 mm
Malá součástka
K_BE
01005 -
16 mm x 16 mm
Nahoře Do 8,5 mm
Kamera hlavy,
typ 38
Dole Do 6,0 mm
Středně velká
součástka, typ
M_BE_1
< 27 x 27 mm
Nahoře
Mezi 8,5 a
11,5 mm
Stacionární kame-
ra součástek,
typ 33
Dole Není možné
Středně velká
součástka, typ
M_BE_2
Mezi
27 mm x 27 mm
a
32 mm x 32 mm
Nahoře 11,5 mm
Dole Není možné
Velká součástka
G_BE
Mezi
32 mm x 32 mm
a 50 mm x
40 mm
Nahoře Do 11,5 mm
Stacionární kame-
ra součástek,
typ 33
Dole Není možné
Tab. 3.5 - 1Klasifikace spektra zpracovávaných součástek
*)a Dodržujte pravidla pro výšku montážních pozicích uvedená v části 3.5.6.2
na straně 144.
3 Technické údaje a konstrukční skupiny Provozní návod SIPLACE, řada X
3.5 Osazovací hlava Od verze softwaru 710.0 Vydání 12/2016
146
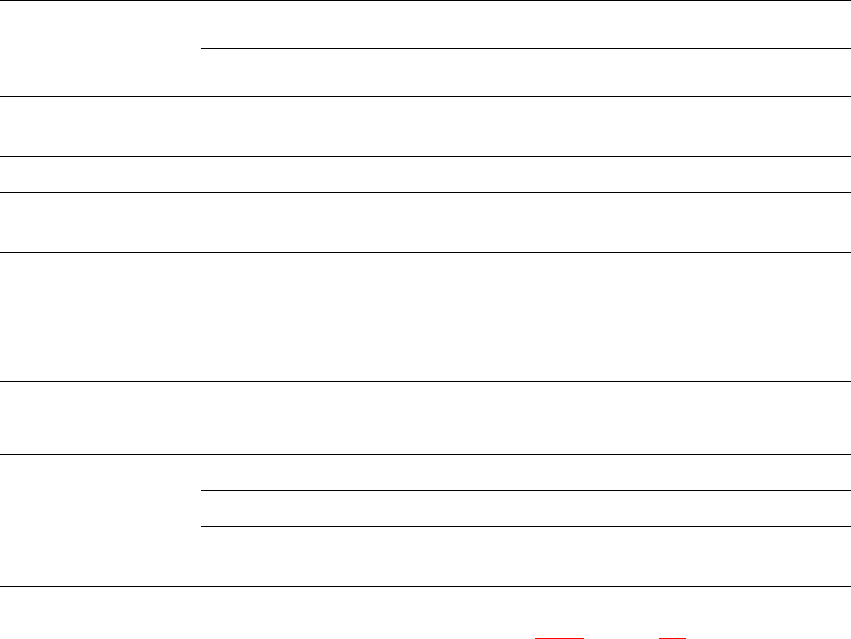
3.5.6.4 Osazovací režimy hlavy MultiStar
Podle třídy součástky pracuje hlava CPP v různých osazovacích režimech. Optimalizace vyba-
vení vybere osazovací režim s minimálním časem taktu. Následující tabulka ukazuje souvislost
mezi třídou součástky a osazovacím režimem.
Tab. 3.5 - 2 Vztahy mezi třídou součástky a osazovacím režimem
3.5.6.5 Montážní polohy hlavy MultiStar na automatech
Osazovací režim Třída součástek
Malá součástka Středně velká součástka Velká součástka
Režim
Collect&Place
Ano Ne Ne
Smíšený režim Ano Ano Ne
Rozšířený režim
Pick&Place
Ano Ano Ano
Osazovací automat Montážní poloha
*a
hlavy CPP
Maximální výška
součástek
Rozpoznávací kamera
Vision
SIPLACE, řada X S Dole 6,0 mm Kamera hlavy
Nahoře 8,5 mm Kamera hlavy
Jen nahoře 11,5 mm
Stacionární kamera sou-
částek
Tab. 3.5 - 3Montážní polohy hlavy CPP na automatech
*)a Dodržujte pravidla pro výšku montážních pozicích uvedená v části 3.5.6.2
na straně 144.