往复式搬运轨道 (自立型) 使用说明书.pdf - 第30页
4. 各部分的名称和功能 INS-NXTSTCBF-3.0S 20 NXT 往复臂搬运轨道 (自立型)使用说明书 4.3 控制箱 电路板接受通道 电路板排出通道 模式设定值 动作说明 1 仅仅从通道 1 接受电路板。 2 仅仅从通道 2 接受电路板。 3 从有前道工序的指示的通道接受 电路板。 通道 1、通道 2 双方有指示的时候,交替接受。 模式设定值 动作说明 1 仅仅向通道 1 排出电路板。 2 仅仅向通道 2 排出电路板。 3 …

INS-NXTSTCBF-3.0S 4. 各部分的名称和功能
NXT 往复臂搬运轨道 (自立型)使用说明书 19
■ LANE2 L/R:(第 2 通道左右选择按钮)
·在手动指教规格中,设定位移位置 (第 2 通道位移位置)时,选择设定往复臂位
置的左或者右的选择开关。
〈正流向规格的时候〉
L: 前道工序侧的第 2 通道电路板接受侧位移位置
R: 后道工序侧的第 2 通道电路板排出侧位移位置
〈逆流向规格的时候〉
R: 前道工序侧的第 2 通道电路板接受侧位移位置
L: 后道工序侧的第 2 通道电路板排出侧位移位置
■ SET:(位移位置设定按钮)
·在手动指教规格中,按下 SETUP LANE POSITION 开关时,在 LED 闪烁时无效。
·按下开关后,用 LANE2 L/R 可以变更选择的位移位置。
·位移位置得变更处理结束后 LED 熄灯。
4. 各部分的名称和功能 INS-NXTSTCBF-3.0S
20 NXT 往复臂搬运轨道 (自立型)使用说明书
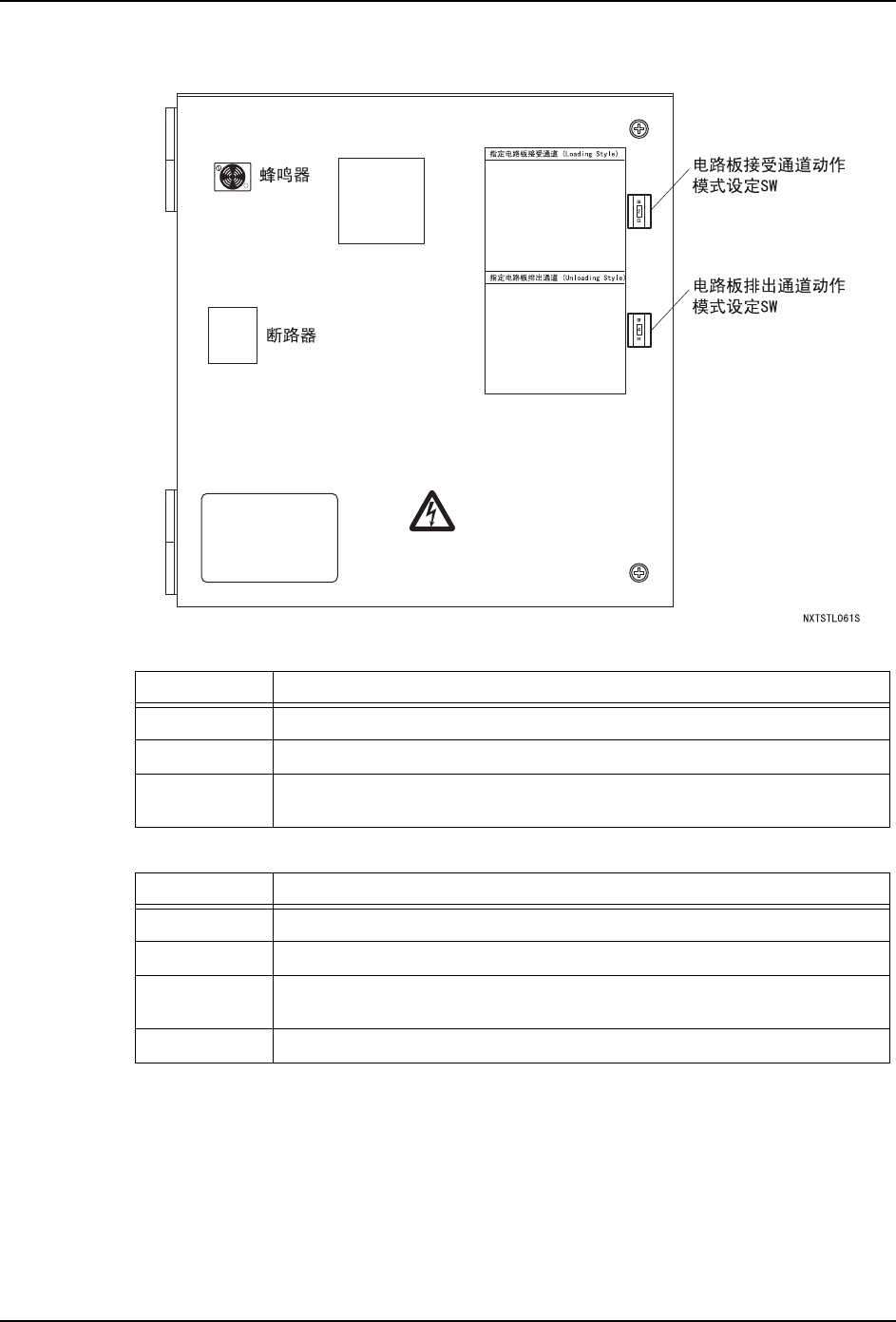
4.3 控制箱
电路板接受通道
电路板排出通道
模式设定值 动作说明
1 仅仅从通道 1 接受电路板。
2 仅仅从通道 2 接受电路板。
3 从有前道工序的指示的通道接受电路板。
通道 1、通道 2 双方有指示的时候,交替接受。
模式设定值 动作说明
1 仅仅向通道 1 排出电路板。
2 仅仅向通道 2 排出电路板。
3 向有后道工序的指示的通道排出电路板。
通道 1、通道 2 双方有要求的时候,以通道 1 为优先排出电路板。
4 与接受电路板相同的通道向后道工序排出电路板。
INS-NXTSTCBF-3.0S 4. 各部分的名称和功能
NXT 往复臂搬运轨道 (自立型)使用说明书 21
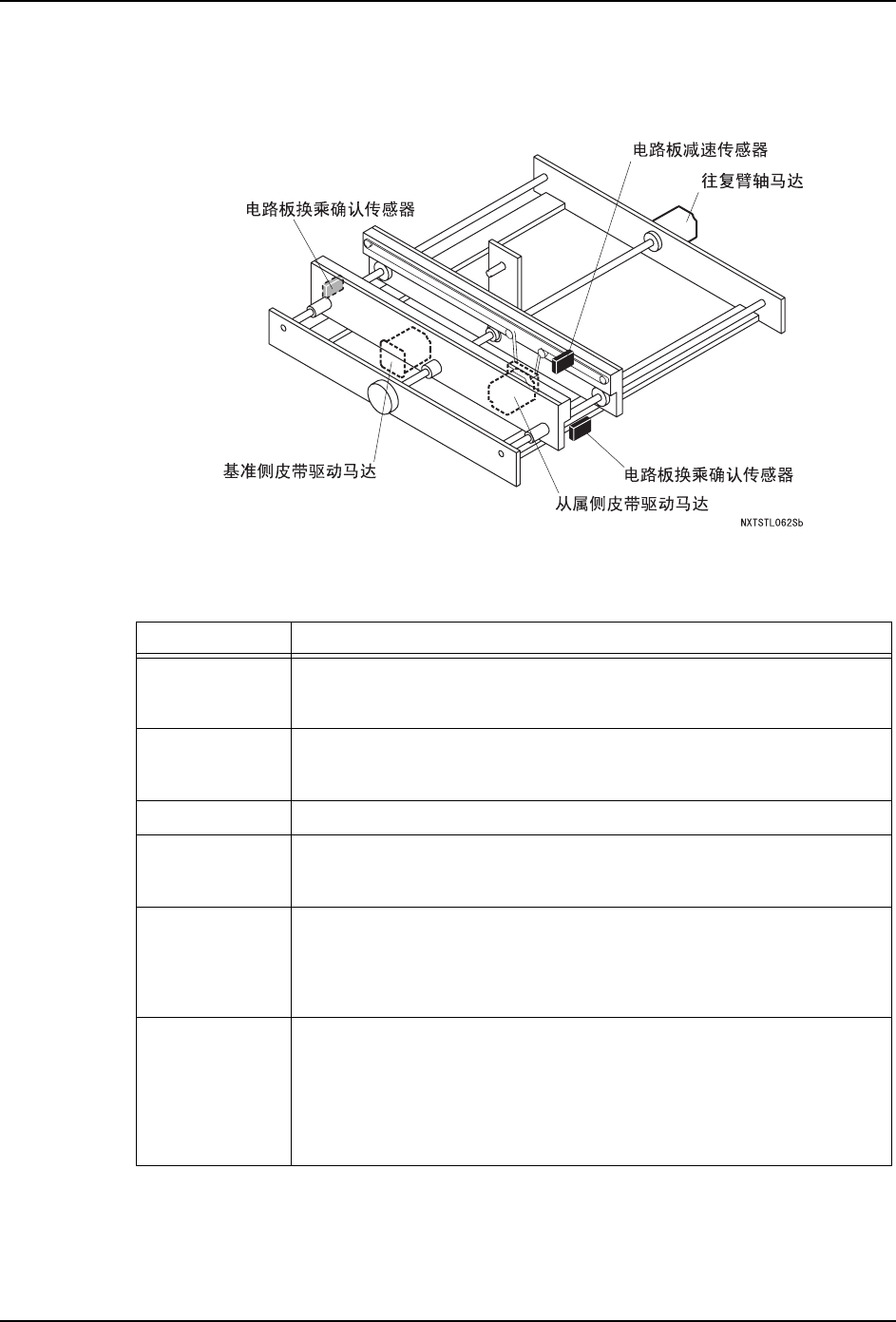
4.4 往复臂搬运轨道内部
4.4.1 传感器、马达
4.5 往复臂搬运轨道的动作说明
项目 动作说明
搬入侧位移间距 用传感器跟踪在前道工序上安装的 Dog,与数值控制互动定位。(选
项)
< 自动变更轨道宽度机 - 合流规格 >
搬运轨道宽度 用传感器跟踪在前道工序上安装的 Dog,与数值控制互动决定宽度。
(选项)
< 自动变更轨道宽度机 >
电路板搬运方向 使用 PLC 的 Input 的切换。
搬出侧位移间距 用传感器跟踪在后道工序上安装的 Dog,与数值控制互动定位。(选
项)
< 自动变更轨道宽度机 - 分流规格 >
接受通道动作 用控制箱门部分的切换开关选择动作模式。
模式的设定值 1:仅仅从通道 1 接受电路板。
2:仅仅从通道 2 接受电路板。
3:从有前道工序的指示的通道接受电路板。通道 1、
通道 2 双方有指示的时候,交替接受。
排出通道动作 用控制箱门部分的切换开关选择动作模式。
模式的设定值 1:仅仅向通道 1 排出电路板。
2:仅仅向通道 2 排出电路板。
3:向有后道工序的指示的通道排出电路板。通道 1、
通道 2 双方有要求的时候,以通道 1 为优先排出电路板。
4:与接受电路板相同的通道向后道工序排出电路板。