Betriebsanleitung_HF3_14_de.pdf - 第280页
Der Rahmen [ Breitenverstellung] ▪ [Übersetzung]: Das Übersetzungsverhältnis angeben. Lesen Sie hierzu das Da- tenblatt des Antriebes. ▪ [Stromgrenze]: Einen Stromgrenzwert in [mA] eingeben. Wird der angezeigte Wert über…
Der Einstellungsdialog [Motor] Breitenverstellung
In diesem Dialog können Sie die Breitenverstellung einrichten und deren Referen-
zierung vornehmen.
HINWEIS
Keine Änderungen möglich?
Für den Zugang zu diesem Dialog sind die Benutzerrechte [Sollwerteingabe] erfor-
derlich. Die Einstellungen können ohne Benutzernamen und Kennwort lediglich
angezeigt werden. Drücken Sie in diesem Fall während die Kennwortabfrage er-
scheint, die Taste [ESC] auf Ihrer Tastatur oder klicken Sie auf die Schaltfläche
[Abbrechen].
Wir beschreiben hier lediglich die Dialoge der Transportspur 1, diese gelten dann
sinngemäß für alle weiteren Transportspuren.
ü Den Einstellungsdialog [Motor] öffnen:
1. Im Eingabedialog [Breitenverstellung] im Rahmen [Breitenverstellung] die
Schaltfläche
anklicken.
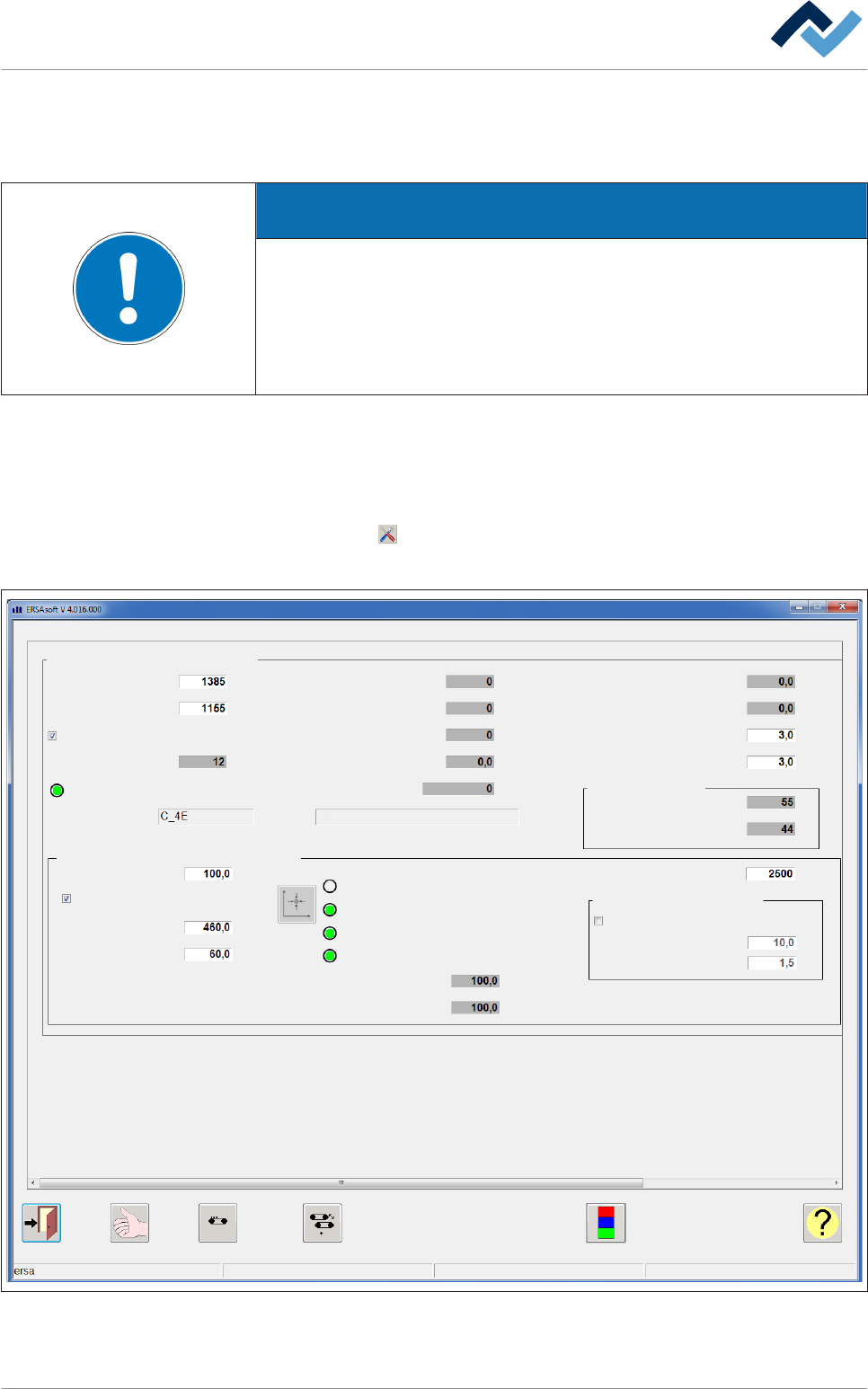
ð Der Einstellungsdialog [Motor] erscheint:
Motor
Sollgeschwindigkeit
Einrichten
Breitenverstellung Tr. 1
Übersetzung
Stromgrenze
Pos. Richtung links
CAN Knoten
Kommunikation OK
Positionierung
Istgeschwindigkeit
Sollgeschwindigkeit
Aktueller Strom
Temperatur
Statusregister
Sollgeschwindigkeit Max.
Sollgeschwindigkeit Min.
Toleranz minus
Toleranz plus
Betriebsdauer
Freigabedauer
Aktuelle Position
Einrichten
Version:
Dauern
U/min
U/minmA
°C
U/min
U/min
mm
in mm
Kein Fehler
Referenzposition
Position maximal
Position minimal
mA
mm
U/min
Stabtransport
Stabdicke Einlauf
Stabdicke Auslauf
Stäbe eingebaut
mm
mm
mm
mm
Motor ist referenziert
in mm
in mm
Einstellungen
Absolute Position
h
h
Breitenverstellung
Ref. Richtung neg.
HW-Referenzschalter (grau=frei)
HW-Endschalter pos. (grün=frei)
HW-Endschalter neg. (grün=frei)
Abb. 100: Der Einstellungsdialog [Motor]
6.17.13
Funktionsbeschreibung | 6
Ersa GmbH Betriebsanleitung_HF3_14_de | 28.10.2014 279 / 0

Der Rahmen [Breitenverstellung]
▪ [Übersetzung]: Das Übersetzungsverhältnis angeben. Lesen Sie hierzu das Da-
tenblatt des Antriebes.
▪ [Stromgrenze]: Einen Stromgrenzwert in [mA] eingeben. Wird der angezeigte
Wert überschritten, wird eine Meldung angezeigt.
▪ [Pos. Richtung links]: Die Checkbox aktivieren, wenn die Positionierung bei
linksdrehender Motorachse vorwärts läuft.
▪ [CAN Knoten]: Zeigt die CAN Knotennummer des Antriebes an.
▪ [Kommunikation OK] Zeigt den Status der Kommunikation zwischen Motor und
SPS an. Ist die Kommunikation OK, wird die LED grün dargestellt.
▪ [Version:] Anzeige der Firmwareversion des Motors.
▪ Istgeschwindigkeit]: Zeigt die aktuelle Motordrehzahl in [U/min] an.
▪ [Sollgeschwindigkeit]: Zeigt den eingestellten Wert der Soll-Motordrehzahl an.
▪ [Aktueller Strom]: Zeigt den aktuellen Motorstrom in [mA] an.
▪ [Temperatur]: Zeigt die aktuelle Motortemperatur in [°C] an.
▪ [Statusregister]: Anzeige zu Service- und Diagnosezwecken.
▪ [Fehlercode:]: Anzeige zu Service- und Diagnosezwecken.
▪ [Sollgeschwindigkeit Max.]: Anzeige der maximal eingestellten Motor-Solldreh-
zahl in [U/min]
▪ [Sollgeschwindigkeit Min.]: Anzeige der minimal eingestellten Motor-Solldreh-
zahl in [U/min].
▪ [Toleranz minus]: Einen Wert für die untere Toleranzgrenze in [cm/min] einge-
ben. Bei Unterschreitung der unteren Toleranzgrenze erfolgt eine Fehlermel-
dung.
▪ [Toleranz plus]: Einen Wert für die obere Toleranzgrenze in [cm/min] eingeben.
Bei Überschreitung der oberen Toleranzgrenze erfolgt eine Fehlermeldung.
Der Rahmen [Dauern]
▪ [Betriebsdauer]: Zeigt an, wie lange der Antrieb seit der Inbetriebnahme mit
Strom versorgt wurde, in [h].
▪ [Freigabedauer]: Zeigt an, wie lange der Antrieb seit der Inbetriebnahme gelau-
fen ist, während sich die Maschine in der Betriebsart [Freigabe] befand.
Der Rahmen [Positionierung]
In das Eingabefeld [Referenzposition] können Sie die ermittelte Referenzposition
eingeben. Beachten Sie hierzu auch die die Anwendungsbeispiele am Ende dieses
Abschnittes.
ü Den [Hardware-Endschalter neg] als Referenzpunkt bestimmen:
1. Die Checkbox [Ref. Richtung neg.] aktivieren.
ð Der [Hardware-Endschalter neg] ist nun Referenzpunkt. Ist die Checkbox nicht
aktiviert, wird der [Hardware-Endschalter Pos] als Referenzpunkt bestimmt.
ü Die minimal/maximal mögliche Transportbreite einstellen:
1. In das Eingabefeld [Position minimal] / [Position maximal] die minimal und die
maximal mögliche Transportbreite eingeben.
ð Hiermit ist der Vorgang abgeschlossen.
Funktionsbeschreibung | 6
Ersa GmbH Betriebsanleitung_HF3_14_de | 28.10.2014 280 / 0

ü Die Sollgeschwindigkeit Des Antriebes einstellen:
1. In das Eingabefeld [Sollgeschwindigkeit] einen Wert in [U/min] eingeben.
ð Mit dieser Drehzahl wird der Motor während der Positionierung betrieben.
ü Die Referenzierung starten:
1. Die Schaltfläche
anklicken.
ð Die Referenzierung wird gestartet.
Die Statusanzeigen im Rahmen [Positionierung]
▪ [HW-Referenzschalter (grau=frei)] Zeigt den Status des Hardware-Referenz-
schalters an. Ist der Schalter nicht belegt, wird die LED grün dargestellt. Ist der
Schalter belegt, wird die LED grau dargestellt.
▪ [HW-Endschalter pos. (grün=frei)] Zeigt den Status des Hardware-Endschalters
in positiver Richtung der Achse an. Ist der Endschalter nicht belegt, wird die
LED grün dargestellt. Ist der Endschalter belegt, wird eine Meldung angezeigt.
▪ [HW-Endschalter neg. (grün=frei)] Zeigt den Status in negativer Richtung der
Achse an. Ist der Endschalter nicht belegt, wird die LED grün dargestellt. Ist der
Endschalter belegt, wird eine Meldung angezeigt.
▪ [Motor ist referenziert] Zeigt den Status der Referenzierung an. Ist eine Refe-
renzierung notwendig, wird die LED grau dargestellt. Ist keine Referenzierung
notwendig, wird die LED grün dargestellt.
▪ [Aktuelle Position] Zeigt die relative Position des beweglichen Transportholmes
zum feststehenden Transportholm in [mm] an.
▪ [Absolute Position] Zeigt die absolute Position der Achse in [mm] an.
Der Rahmen [Stabtransport]
Die Checkbox [Stäbe eingebaut] aktivieren. Nun können Sie in die Eingabefelder
[Stabdicke Einlauf] und [Stabdicke Auslauf] Werte in [mm] eingeben. Dies dient der
Ausblendung der Stäbe während der Erfassung des Lötgutes über die Einlauf- bzw.
Auslaufsensoren. Durch Ändern dieser Parameter können Sie die Empfindlichkeit
der Sensoren beeinflussen.
Der Rahmen [Statusfehler]
Dieser Rahmen wird sichtbar, wenn Sie den waagerechten Scrollbalken nach rechts
verschieben. Liegt ein Statusfehler vor, wird die entsprechende LED grün darge-
stellt. Folgende Statusfehler werden angezeigt:
▪ [Allgemeiner Fehler]
▪ [Stromfehler]
▪ [Spannungsfehler]
▪ [Temperaturfehler]
▪ [Kommunikationsfehler]
▪ [Motorspezifischer Fehler]
▪ [Reserviert]
▪ [Herstellerspezifischer Fehler].
ü Einstellungen übernehmen, Dialog schließen
1. Die Einstellung durch Anklicken der Schaltfläche
übernehmen.
Funktionsbeschreibung | 6
Ersa GmbH Betriebsanleitung_HF3_14_de | 28.10.2014 281 / 0