TCM-X110_X210_X300(D) 3_Programming and Machine Data.pdf - 第273页
* 3 * 3 * 3 * 3 * 3 自 动 运 行 停 止 机 能 自 动 运 行 停 止 机 能 自 动 运 行 停 止 机 能 自 动 运 行 停 止 机 能 自 动 运 行 停 止 机 能 设 定 自 动 运 行 停 止 机 能 为 “ 不 使 用 ” , “ 使 用 ” 的 数 据 。 设 定 自 动 运 行 停 止 机 能 为 设 定 自 动 运 行 停 止 机 能 为 设 定 自 动 运 行 停 止 机 能 为 设 定 …
页 面 构 成页 面 构 成
页 面 构 成页 面 构 成
页 面 构 成
* 1* 1
* 1* 1
* 1
线 路 板 搬 运线 路 板 搬 运
线 路 板 搬 运线 路 板 搬 运
线 路 板 搬 运
设定线路 板的搬运方向。
“
LL
LL
L →
RR
RR
R ”
线路板从左向右流动。
“
RR
RR
R →
LL
LL
L ”
线路板从右向左流动。
变更设定时,需要再做一次原点复位操 作。
* 2* 2
* 2* 2
* 2
排 出 优 先 机 能排 出 优 先 机 能
排 出 优 先 机 能排 出 优 先 机 能
排 出 优 先 机 能
设定线路板排出动作的优先排出机能为 “ 不使用 ” ,“ 使用 ”
的数据 。
设 定 排 出 优 先 机 能 为设 定 排 出 优 先 机 能 为
设 定 排 出 优 先 机 能 为设 定 排 出 优 先 机 能 为
设 定 排 出 优 先 机 能 为 “
不 使 用不 使 用
不 使 用不 使 用
不 使 用 ”
时时
时时
时
((
((
(
标 准标 准
标 准标 准
标 准
))
))
)
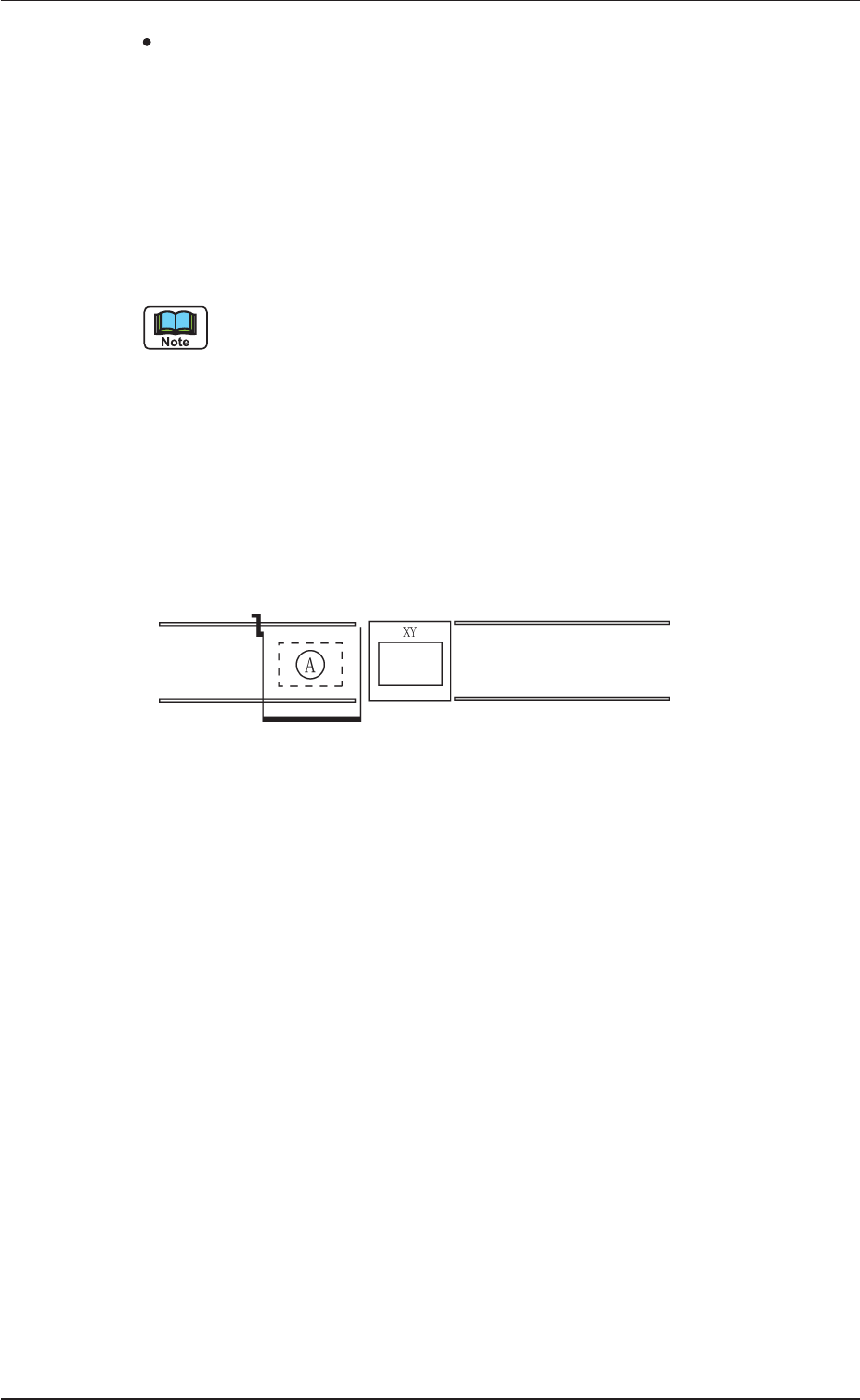
X Y 工作台上贴装完成加工完结线路板的排出,与如下线路板
的向 X Y 工作台部的搬送操作同时进行。
下一个线路板尚到之前,图中 A 部的 X Y 工作台上的安装结束
的线路板 处于待机状态。
设 定 排 出 优 先 机 能 为设 定 排 出 优 先 机 能 为
设 定 排 出 优 先 机 能 为设 定 排 出 优 先 机 能 为
设 定 排 出 优 先 机 能 为 “
使 用使 用
使 用使 用
使 用 ”
时时
时时
时
完成 X Y 工作台上线路板的贴装,X Y 工作台返回到原点,A 部
无线路板 ,也没启动传送带传送时,按优先排出机能启动线
路板搬送实行后工序的线路板( 贴装线路板) 排出。
与前工序 装置的流水作业不均一,避开完成线路板的滞留
( X Y 工作台上) 的情况,此方式为有效。
F i g . 3 E 4 9F i g . 3 E 4 9
F i g . 3 E 4 9F i g . 3 E 4 9
F i g . 3 E 4 9
0308-001 5-55
3 . 33 . 3
3 . 33 . 3
3 . 3 “
运行参数运行参 数
运行参数运行参 数
运行参数 ”
T a bT a b
T a bT a b
T a b
* 3* 3
* 3* 3
* 3
自 动 运 行 停 止 机 能自 动 运 行 停 止 机 能
自 动 运 行 停 止 机 能自 动 运 行 停 止 机 能
自 动 运 行 停 止 机 能
设定自动运行停止机能为 “ 不使用 ”,“ 使用 ” 的数据。
设 定 自动运 行 停止 机能为设定 自 动运 行停 止 机 能为
设 定 自动运 行 停止 机能为设定 自 动运 行停 止 机 能为
设 定 自 动运 行 停 止 机能 为 “
使 用使 用
使 用使 用
使 用 ”
时时
时时
时
((
((
(
标准标 准
标准标 准
标 准
))
))
)
装置上一块线路板也没有的预置状态下,点击 “ 启动 ” 按钮
“O N ” 进入自动运作,前工序的线路板传送为 “ 待机中 ” 时,
检测前工序运作信号的 O F F ,该状态维持 2 秒时,停止运作。
装置上无 线路板,前工序没有自动运行时,线路板不可能被
送来,可 以判断没有必要继续自动运行。
处理装置 上的线路板,无其他未处理的线路板状态下,完结
线路板的 后工序排出结束后,前工序为运作停止状态时自动
停止 。
在与别家公司的装 置连接时,有时无 法运作。
* 4* 4
* 4* 4
* 4
前 工 序 的 排 出 方 式前 工 序 的 排 出 方 式
前 工 序 的 排 出 方 式前 工 序 的 排 出 方 式
前 工 序 的 排 出 方 式
设定适当 的前工序线路板排出方式。
传 送 带传 送 带
传 送 带传 送 带
传 送 带
连接到通 过传送带的线路板接受中前工序元件搬运信号,运
行供给传 送带。
若元件传 送信号中断,供给传送带则停止。
推 杆推 杆
推 杆推 杆
推 杆
用推杆强 制性地从前工序传送到供给传送带上的一种线路板
接受对应 方式。
供给传送带入口处无线路板检测传感器( 推杆用) 时,不设定
“ 推杆 ”。
S M E M A (S M E M A (
S M E M A (S M E M A (
S M E M A (
未被激活未被激活
未被激活未被激活
未被激活
))
))
)
进行按 S M E M A 规定的传送 I / F 。
传 送 带传 送 带
传 送 带传 送 带
传 送 带
22
22
2
具有传送带的线路板接受只在 “ 元件要求信号 ” 中操作。
传 送 带传 送 带
传 送 带传 送 带
传 送 带
33
33
3
连接到通 过传送带的线路板接受中前工序元件搬运信号,运
行供给传 送带。
即使元件 搬运信号中断一定时间,供给传送带也继续运行。
0308-001 5-56
3 . 33 . 3
3 . 33 . 3
3 . 3 “
运行参数运行参 数
运行参数运行参 数
运行参数 ”
T a bT a b
T a bT a b
T a b
* 5* 5
* 5* 5
* 5
供 给 传 送 带供 给 传 送 带
供 给 传 送 带供 给 传 送 带
供 给 传 送 带
时间时间
时间时间
时间
1 [1 [
1 [1 [
1 [
秒秒
秒秒
秒
]]
]]
]
、、
、、
、
时间时间
时间时间
时间
2 [2 [
2 [2 [
2 [
秒秒
秒秒
秒
]]
]]
]
、、
、、
、
停止时间停止时间
停止时间停止时间
停止时间
((
((
(
存储存储
存储存储
存储
) [) [
) [) [
) [
秒秒
秒秒
秒
]]
]]
]
设定供给 传送带。
时间时间
时间时间
时间
1 [1 [
1 [1 [
1 [
秒秒
秒秒
秒
]]
]]
]
设定与前 工序的线路板接受中供给传送带的动作限定时间。
记录供给 传送带运作的时间,监视线路板的碰撞异常。
(a) 设定用于与前 工序装置的线路板接受传送的 时间
上增加 2 秒的数据。
(b) 数据输入范围为 “ 0 ~9 9 秒 ”。
时间时间
时间时间
时间
2 [2 [
2 [2 [
2 [
秒秒
秒秒
秒
]]
]]
]
设定随着 供给传送带在装置内传送线路板的供给传送带的动
作限定时 间。
记录供给 传送带运作的时间,监视线路板的碰撞异常。
数据输入范围为 “0 ~9 9 秒 ”。
停止时 间停止时 间
停止时 间停止时 间
停止 时 间
[[
[[
[
秒秒
秒秒
秒
]]
]]
]
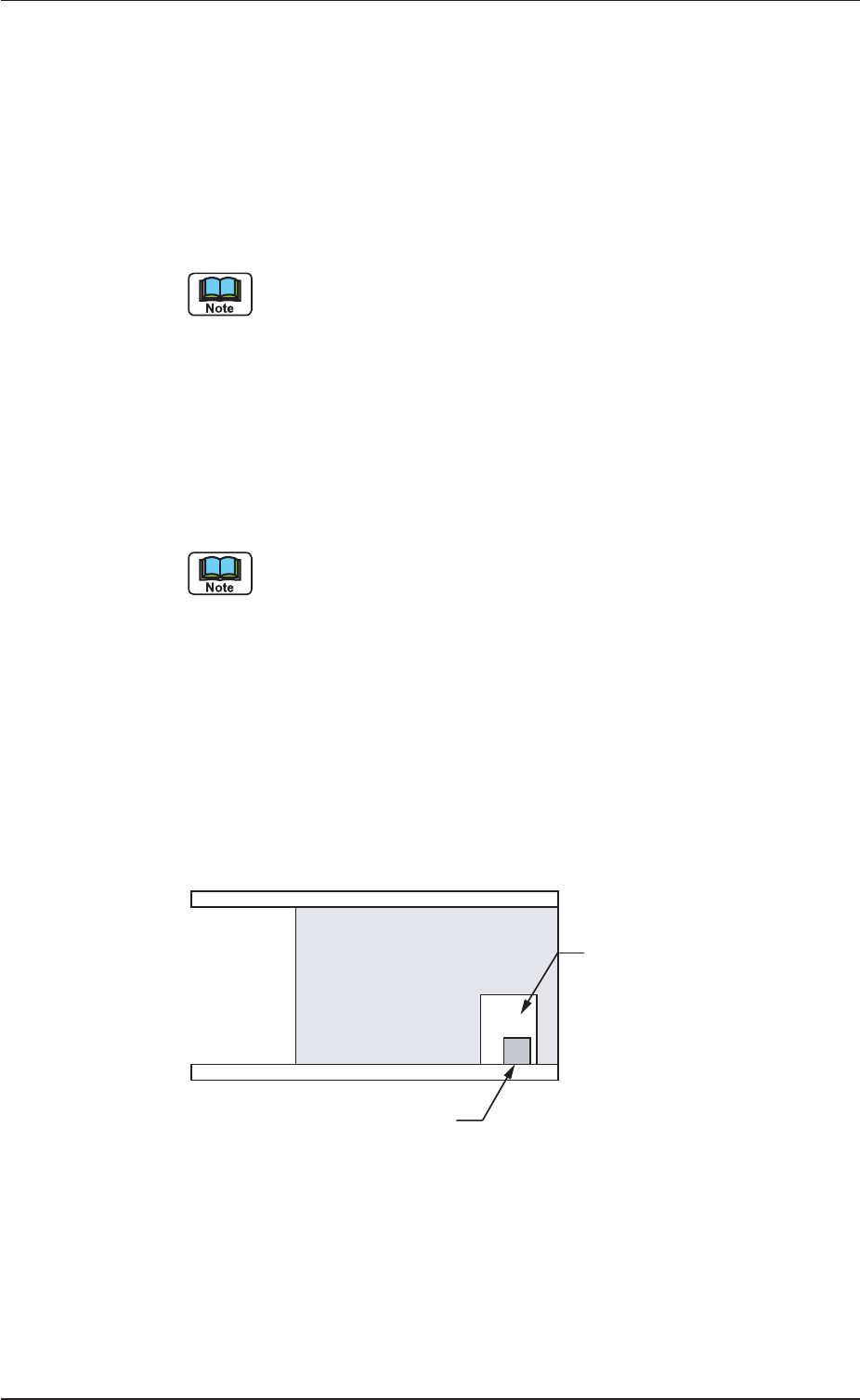
设定检测供 给传送带的缓冲位置传感器后,到传送带停止的
延迟时 间。
如下图中的 线路板,光传感器检测线路板后停止时,线路板
刚好在线路 板样品的间隙中停止的情况,容易判定为无线路
板,因此设定延 迟时间。
F i g . 3 E 5 0F i g . 3 E 5 0
F i g . 3 E 5 0F i g . 3 E 5 0
F i g . 3 E 5 0
0308-001 5-57
3 . 33 . 3
3 . 33 . 3
3 . 3 “
运行参数运行参 数
运行参数运行参 数
运行参数 ”
T a bT a b
T a bT a b
T a b
线 路线 路
线 路线 路
线 路
板板
板板
板
剪 切 块剪 切 块
剪 切 块剪 切 块
剪 切 块
光 传 感 器光 传 感 器
光 传 感 器光 传 感 器
光 传 感 器