NPM-DGS-2D检查编辑器.pdf - 第94页
NPM-DGS 2D 检查编辑器 2.4 元件检查设定 ( 检查条件数据的设定 ) Page 2-54 EJS9AC-MB-02R-08 ② LUT 的设定 元件位置检查无需设定 LUT 。 ③ 参数的设定 根据需要设定参数。 内容 说明 单位 标准值 上限值 下限值 ‘ 偏移量判定值 NG X’ 设定判定 OK/NG 的阈值。 如果超出了阈值,即为 NG 。 m 170.0 10000. 0 0.0 ‘ 偏移量判定值 NG Y’ …
NPM-DGS
2D
检查编辑器
2.4
元件检查设定
(
检查条件数据的设定
)
EJS9AC-MB-02R-08 Page 2-53
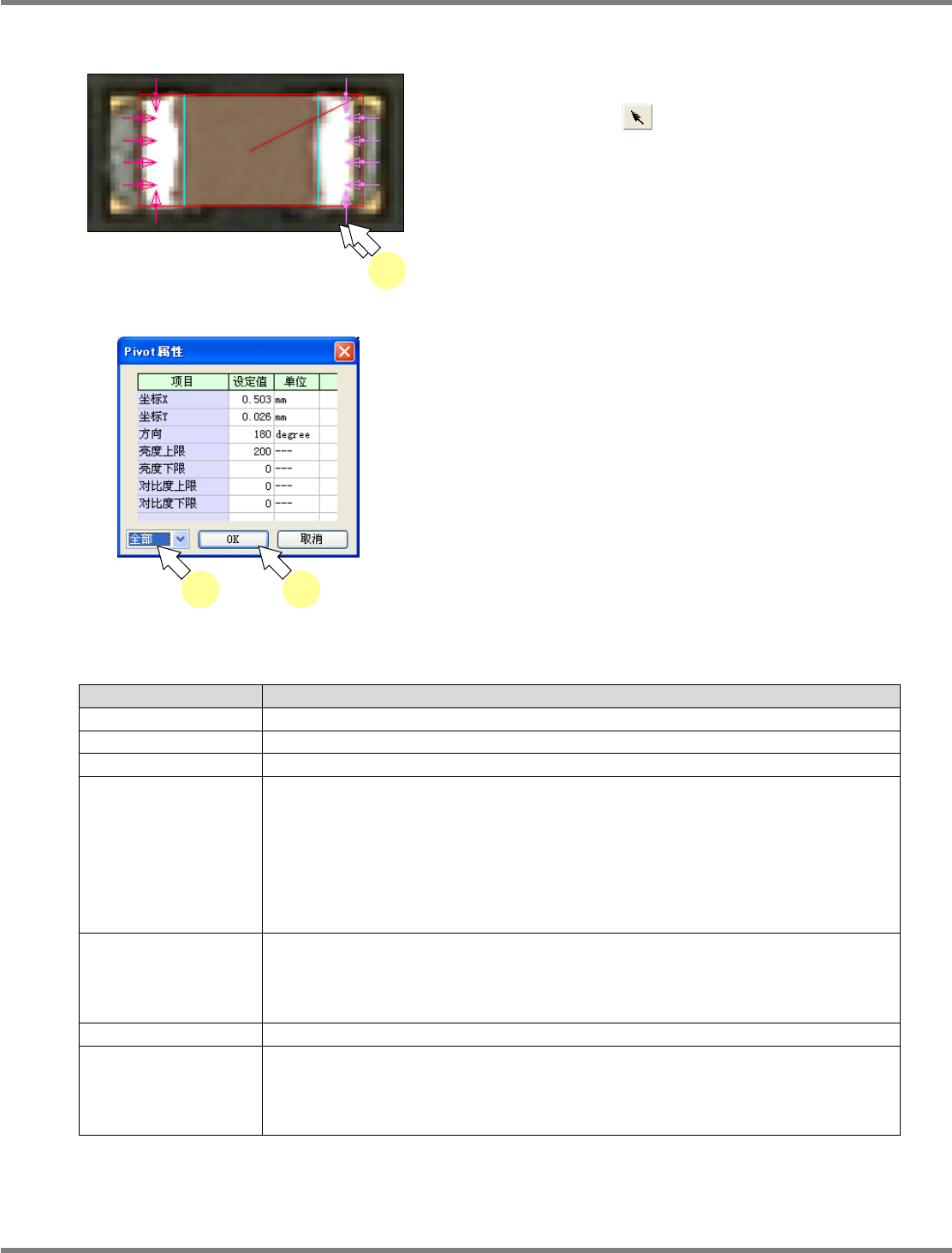
设定
Pivot
的属性。
1
双击
Pivot
。
请在
为
OFF
的状态下执行操作。
将会显示
Pivot
属性。请设定相关参数。
2
选择已反映了设定数据的
Pivot
。
‘
全部
’
设定为目前所设定的全部粗识别或精识别
Pivot
。
‘
组
’
设定为属于相同组的
Pivot
。
‘
个别
’
设定为选择中的一个
Pivot
。
3
点击
[OK]
。
Pivot
属性窗口即结束。
项目
内容
坐标
X Pivot
的
X
坐标。通常在画面上设定而无需输入。
坐标
Y Pivot
的
Y
坐标。通常在画面上设定而无需输入。
方向
Pivot
的角度。通常在画面上设定而无需输入。
亮度上限
在演算
Pivot
和画像的评价值之际,如果没有满足条件,即跳过这项操作。
条件
:
组内的全部
Pivot
,从中央到尖端的位置为
像素值的平均
>
设定参数
(0 ~ 225)
例如
:
在设定了芯片元件电极的
Pivot
的情形下,将本参数设定为
‘200’
。这样,即能够
减少电极周围的焊膏和基板境界的识别错误。
亮度下限
与上述相同,但条件不痛。
条件
:
从组内的全部
Pivot
末端起到中间点位置的画像上,
像素值的平均
>
设定参数
(0 ~ 225)
对比度上限
不使用。
对比度下限
在演算
Pivot
和画像的评价值之际,如果没有满足条件,即跳过这项操作。
条件
:
组内的全部
Pivot
,从末端到尖端的位置为
像素值的分散
>
设定参数
(0 ~ 225)
1
2 3
NPM-DGS
2D
检查编辑器
2.4
元件检查设定
(
检查条件数据的设定
)
Page 2-54 EJS9AC-MB-02R-08
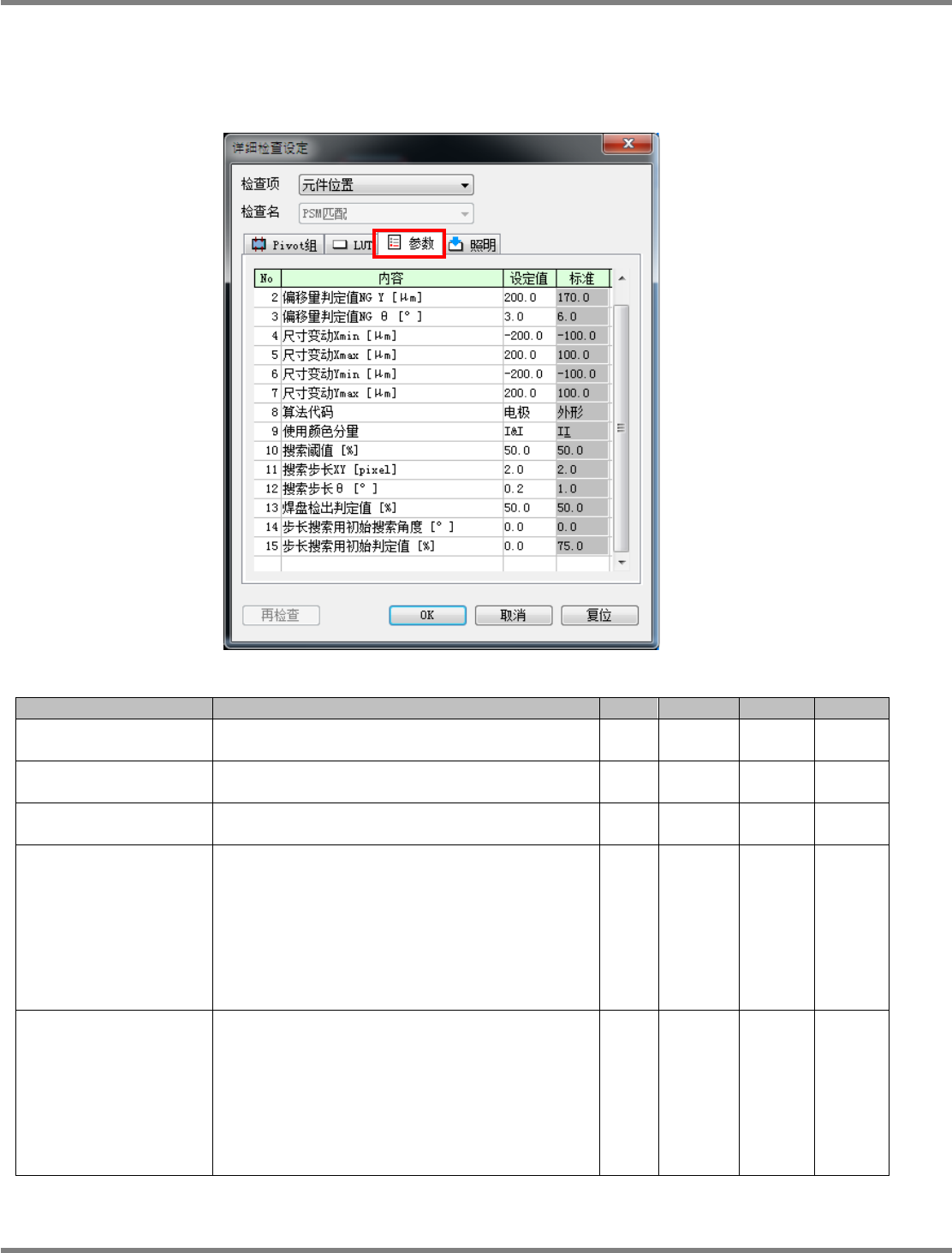
②
LUT
的设定
元件位置检查无需设定
LUT
。
③ 参数的设定
根据需要设定参数。
内容
说明
单位 标准值
上限值
下限值
‘
偏移量判定值
NG X’
设定判定
OK/NG
的阈值。
如果超出了阈值,即为
NG
。
m 170.0 10000.
0
0.0
‘
偏移量判定值
NG Y’
设定判定
OK/NG
的阈值。
如果超出了阈值,即为
NG
。
m 170.0 10000.
0
0.0
‘
偏移量判定值
NG
’
设定判定
OK/NG
的阈值。
如果超出了阈值,即为
NG
。
6.0 45.0 0.0
‘
尺寸变动
X min’
设定使
Pivot
组的
X
尺寸缩小的值。
通常,在
Xmin
设定负
(
缩小
)
值,在
Xmax
设定正
(
扩
大
)
值,然后扩大或缩小
Pivot
组的形状来进行识
别。
如果设定了过大值,会增加识别处理时间。因此请
不要设定比公差大的值。
在只需要变动
1
个轴的情形下,请将无需变动的
方向设定为
0
。
m -100 500.0 -500.0
‘
尺寸变动
X max’
设定使
Pivot
组的
X
尺寸扩大的值。
通常,在
Xmin
设定负
(
缩小
)
值,在
Xmax
设定正
(
扩
大
)
值,然后扩大或缩小
Pivot
组的形状来进行识
别。
如果设定了过大值,会增加识别处理时间。因此请
不要设定比公差大的值。
在只需要变动
1
个轴的情形下,请将无需变动的
方向设定为
0
。
m 100 500.0 -500.0
page2-43-1
NPM-DGS
2D
检查编辑器
2.4
元件检查设定
(
检查条件数据的设定
)
EJS9AC-MB-02R-08 Page 2-55
内容
说明
单位
标准值
上限值 下限值
‘
尺寸变动
Ymin’
设定使
Pivot
组的
Y
尺寸缩小的值。
通常,在
Ymin
设定负
(
缩小
)
值,在
Ymax
设定正
(
扩
大
)
值,然后扩大或缩小
Pivot
组的形状来进行识别。
如果设定了过大值,会增加识别处理时间。因此请
不要设定比公差大的值。
在只需要变动
1
个轴的情形下,请将无需变动的方
向设定为
0
。
m -100 500.0 -500.0
‘
尺寸变动
Ymax’
设定使
Pivot
组的
Y
尺寸扩大的值。
通常,在
Ymin
设定负
(
缩小
)
值,在
Ymax
设定正
(
扩
大
)
值,然后扩大或缩小
Pivot
组的形状来进行识别。
如果设定了过大值,会增加识别处理时间。因此请
不要设定比公差大的值。
在只需要变动
1
个轴的情形下,请将无需变动的方
向设定为
0
。
m 100 500.0 -500.0
‘
算法代码
’
①电极
/
外形
:
识别元件的基本方法。
②
**2:
电极
2/
外形
2
为使处理速度高速化而采用的阶段式搜索方法。
③
**
双方向
:
外形
(
双方向
)/
外形
2(
双方向
)
不依存于
Pivot
的方向
(
明暗
)
而执行元件识别的
方法。
④
(PAD):
电极
(PAD)/
电极
2(PAD)
未使用
选择
电极
-
-
‘
使用颜色分量
’
这是粗识别和精识别所使用的颜色空间信息。
显示
:
◇
&
△
◇
:
指定粗识别所使用的颜色画像
△
:
指定精识别所使用的颜色画像
◇和△显示为:“H”、“S”和“|”。
H: HIS 画像的 H 成份画像
S: HIS画像的 S 成份画像
I: HIS 画像的 I 成份画像
请务必选择“|&|”。
选择
I&I I&I I&I
‘
搜索阈值
’
在检查元件位置之际,通过确切的评价值算出元件
的存在,并根据最高的评价值信息来决定元件位置。
如果这时的最高评价值小于指定阈值,即会判断为
元件不存在,且检查为
NG
。
% 50.0 100.0 0.0
‘
搜索步长
XY’
请务必设定
“2”
。
dot 2.0 2.0 2.0
‘
搜索步长
’
这是搜索角度的步进单位
1.0 45.0 0.0
‘
焊盘检出判定值
’
未使用
% 50 50.0 50.0
‘
步长搜索用
初始搜索角度
’
当在算法代码下指定了步长搜索时适用的参数。
(
初始搜索的
“
搜索角度
”)
0 3.0
0.0
‘
步长搜索用
初始判定值
’
当在算法代码下指定了步长搜索时适用的参数。
(
初始搜索的
“
阈值
”)
% 75 100.0 0.0