00195376-05_SM_D1_D1i_D2_D2i_EN.pdf - 第205页
Settings 6.2.2 Anticrash Function for the A364 Axis Card Gantries Service Manual SIPLACE D1/D1i/D2/D2i 205 6.2.2 6 . 2 . 2 A n t ic r a s h F u n c t io n f o r t h e A 3 6 4 A x is C a r d Anticrash Function for the A36…
Settings
Gantries 6.2.1 Travel Ranges and Speed Monitoring
204 Service Manual SIPLACE D1/D1i/D2/D2i
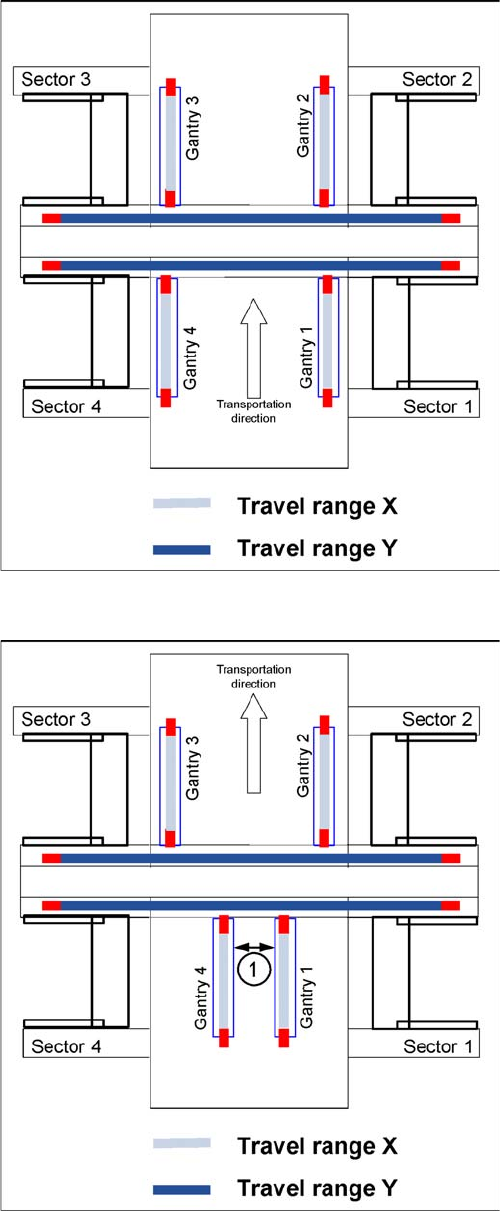
Travel range for X and Y axes (D4 shown as example)
The end of the X-axis travel range is + or - 0.5 mm before
the bumper. This safety distance to the bumper is ade-
quate, if the X-axis moves into this area with excessive
speed.
The end of the Y-axis travel range is+ or - 1.5 mm before
the bumper. Monitoring of the Y-axis travel range in a
placement area is handled by software. There is a contin-
uous communication exchange between the two Y-axes
and their positions, via the SPI Bus.
Travel range for X and Y axes (D4 shown as example)
1. During travel range calibration, the X axis moves as
far as possible towards the minimum or maximum po-
sition, until it touches the bumper.
The travel ranges are calculated, taking into account
the relevant safety gap.
2. Gantry 1 moves just to the minimum position and
gantry 2 to the maximum position, for the Y-axis in the
placement area.
3. The minimum safety distance between the gantries,
during placement: minimum 4 mm.
Settings
6.2.2 Anticrash Function for the A364 Axis Card Gantries
Service Manual SIPLACE D1/D1i/D2/D2i 205
6.2.2
6.2.2 Anticrash Function for the A364 Axis Card
Anticrash Function for the A364 Axis Card
6.2.2.1
6.2.2.1 Anticrash Function for the A364
Anticrash Function for the A364
▪ The anticrash function is no longer provided by the anticrash board but instead by the A364 software
(application 1). This means that the proximity switches used to monitor the travel range and the sen-
sor for monitoring the gantry spacing are no longer required.
▪ Tasks:
– Monitoring the X and Y axis travel ranges
Evaluation of the actual position of the respective axis in the direction of the bumper, based on
the speed.
– Monitoring the distance of both Y axes in a placement area
Evaluation of the actual position of the own gantry and the partner gantry at gantry crash moni-
toring.
– Count error monitoring of the gantry axis
Monitoring incoming count pulses (edge control) over time.
6.2.2.2
6.2.2.2 Anticrash Monitoring for the A364
Anticrash Monitoring for the A364
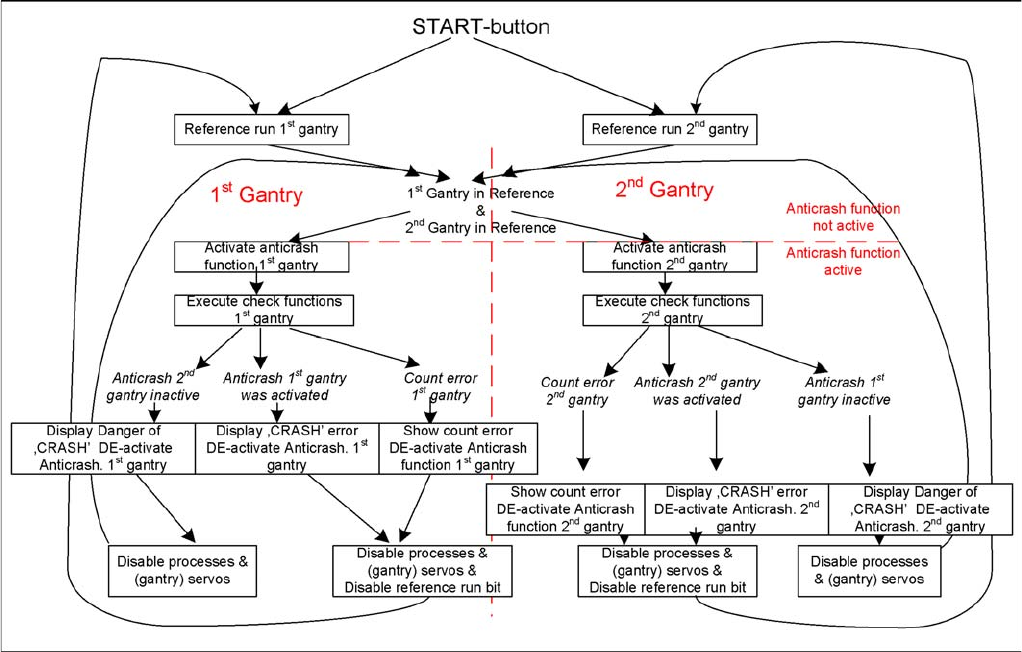
The anticrash function is activated after the X/Y axes have been referenced. When the gantry axes are
referenced for the first time, anticrash monitoring is not active, which does not matter, due to the low ref-
erence speed.
After this, the bit is set for the anticrash monitoring function and the actual position for the relevant part-
ner gantry is continuously communicated via the SPI Bus.
The following information is exchanged between the Y axes:
▪ Actual position and speed of the own gantry
▪ Status information (reference state, anticrash monitoring state ).
6.2.2.3
6.2.2.3 Error "Gantry Crash"
Error "Gantry Crash"
A “gantry crash” error is established by calculating the position difference and speed difference for both
axes. A gantry crash error is signaled via the axis card and the CAN Bus. The servo is released for both
axes and both need to be referenced again.
6.2.2.4
6.2.2.4 Count Error:
Count Error:
If the axis board detects a "fatal count error", the axis concerned will be released and the anticrash func-
tion disabled. The other axis is informed of this in the status information and will also disable the ant-
icrash function. The released axis now needs to be referenced again.
after which the anticrash function will be re-enabled for both axes.
Settings
Gantries 6.2.3 PCB Boards on the Gantry
206 Service Manual SIPLACE D1/D1i/D2/D2i
6.2.2.5
6.2.2.5 Anticrash Function
Anticrash Function
6.2.3
6.2.3 PCB Boards on the Gantry
PCB Boards on the Gantry
The boards on the gantry, as described below, are basically identical and do not depend on the head
configuration of D1, D2 and D4 machines. The CAN bus terminating resistor is fixed onto the gantry head
distributor.