JM-100使用说明书.pdf - 第218页
第 1 部 基本篇 第 2 章 生产 2- 11 8 2- 13 生产时 的各 项处理 2- 13 - 1 ZA 轴 16 mm 高度的动作条件 以下所示是 ZA 轴在 16 mm 高度动 作的条件。 要使 ZA 轴在 16 mm 高度动作时必须 全部 满足以 下条件。 No. 条件 1 机器设置的「生 产开始时 贴装头高 度」为 16 mm 以下 2 本机贴装元件的 「元件高度 + 吸取深度」 的最大值为 16 mm 以下 3 本机贴…
第 1 部 基本篇 第 2 章 生产
2-117
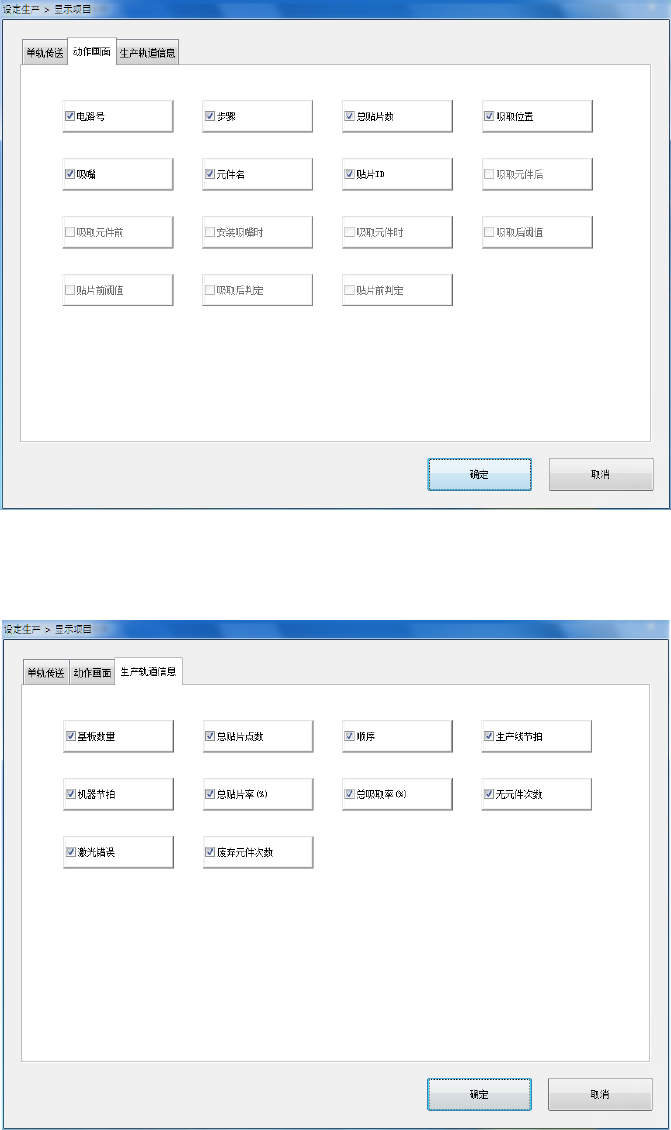
可在「动作画面」选项卡中设置动作状态画面的 Head 信息项目的显示/隐藏。
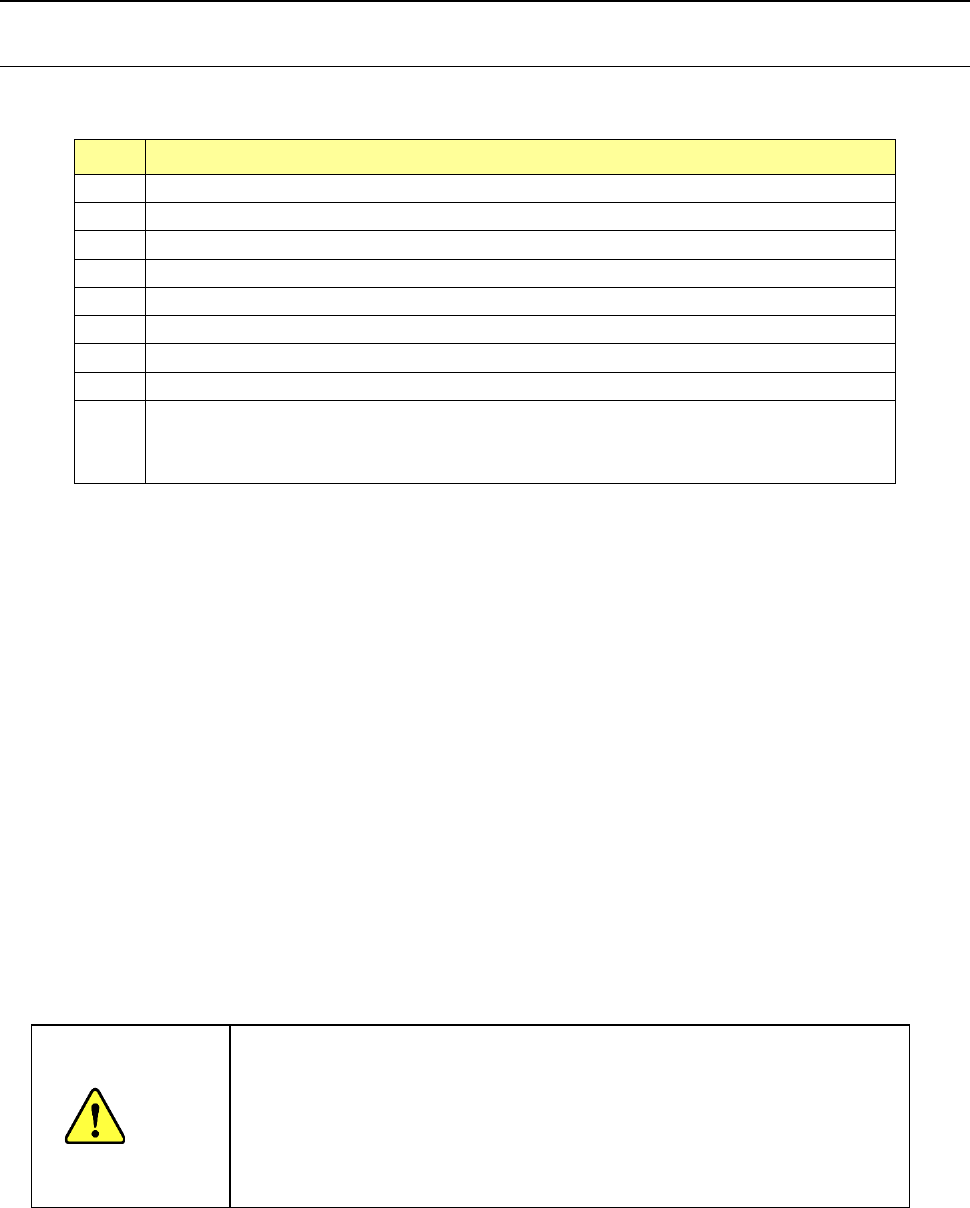
可在「生产轨道信息」选项卡中,设置图像/动作状态/生产数量画面上部的生产轨道信息的显示/隐藏。
第 1 部 基本篇 第 2 章 生产
2-118
2-13 生产时的各项处理
2-13-1 ZA 轴 16mm 高度的动作条件
以下所示是 ZA轴在 16mm高度动作的条件。要使 ZA轴在 16mm高度动作时必须全部满足以下条件。
No.
条件
1
机器设置的「生产开始时贴装头高度」为
16mm
以下
2
本机贴装元件的「元件高度
+
吸取深度」的最大值为
16mm
以下
3
本机贴装元件的对角长度最大值为
86mm
不到
4
吸取高度的最大值为
16mm
以下
5
本机贴装元件的最大元件高度
+
基板高度
(
仅限基板高度为正时
)
为
16mm
以下
6
本机贴装元件的「元件高度-贴片深度补偿
(
仅限深度补偿为负时
)
」
16mm
以下
7
未测定贴片基板面高度
8
生产程序中开始时生产贴装头高度为
16mm
以下
9
未安装径向供料器
(
后部台架
)
、轴向供料器、管状供料器
V1
(轴向供料器、管状供料器 V1 可以在机器设置中变更 ZA 高度的设定。ZA 轴高
度的默认设定不能为
16mm
。
)
※ 前侧和后侧要分别判断是否能以 ZA 轴 16mm 高度动作。
如果前侧供给可以是 16mm,而 后 侧供给不可以是 16mm,则仅在前侧供给时 ZA 轴以 16mm 高
度动作。
径向供料器吸取错误时通过 HMS 检查有无元件,因此时超过了后侧第 1 段的 Y 界限,可能与供
给装置发生冲突,所以在后侧使用时 ZA 轴在 20mm 高度下动作。而前部不会发生冲突,ZA 轴
在 16mm 高度下动作。
◆ ZA 轴高度的动作因传送缓冲数而不同。
1) 3 缓冲模式下,「 3 缓冲对应基板尺寸的 ZA 轴动作」为无效时,ZA 轴高度根据全部贴片点
中最高的高度动作。
2) 3 缓冲模式下,「 3 缓冲对应基板尺寸的 ZA 轴动作」为有效时
※
,ZA 轴高度根据已贴片点中
最高的高度动作。
3) 1 缓冲模式下,ZA 轴高度根据已贴片点中最高的高度动作。
※ 基板尺寸不同动作不同,具体情况请参照「11-4-4 3 缓冲对应基板尺寸的 ZA 轴动作」。
注意
如上述的值被错误设定时,有可能与贴装头发生冲突。
请务必输入正确的设定值。
另外,当台架上配置了生产不使用的供给装置时,可能会发生贴片头冲
突。请在生产前取下不使用的供给装置,若仍保持配置则请将 ZA 轴高度
设定为不会与供给装置发生冲突的高度。
第 1 部 基本篇 第 2 章 生产
2-119
2-13-2 继续返回原点
在可以进行继续返回原点的状态下,按〈START〉按钮,即显示带有[伺服锁]按钮的画面。
要显示继续返回原点画面,前提是必须先完成一次全轴返回原点。
◇ 出现切断伺服电源的异步事项时能否进行继续返回原点列表如下。
No.
异步事项
继续返回原点
1
主机异常停止
○
2
供料器悬浮瞬间停止
○
3
各轴限位传感器检测
○
4
各轴报警
○
5
基准领域传感器检测
○
6
POWER OFF(CE
机
)
○
◆ 发生下述情况时,不能进行继续返回原点。
1) 全轴返回原点未完成时
2) 已执行了继续返回原点,但未完成时