JM-100使用说明书.pdf - 第817页
第 2 部 功能详解篇 第 11 章 选项组件 11 - 33 11 - 8 3D 传感器 11 -8- 1 概要 对插入元件进行 图像定心 的单元。 相当于以往 机型的 VC S 单元 、 DFFPVCS 。 11 -8- 2 机器设置 设置 是否使用 3D 传感器 。有关详细, 请参照「第 07 章 _ 机器设置 」的「 7- 3-1- 5 3D 传感器 」。 11 -8- 3 程序编辑 设置 3D 传感器的识 别条件 参数以及识别…
第 2 部 功能详解篇 第 11 章 选项组件
11-32
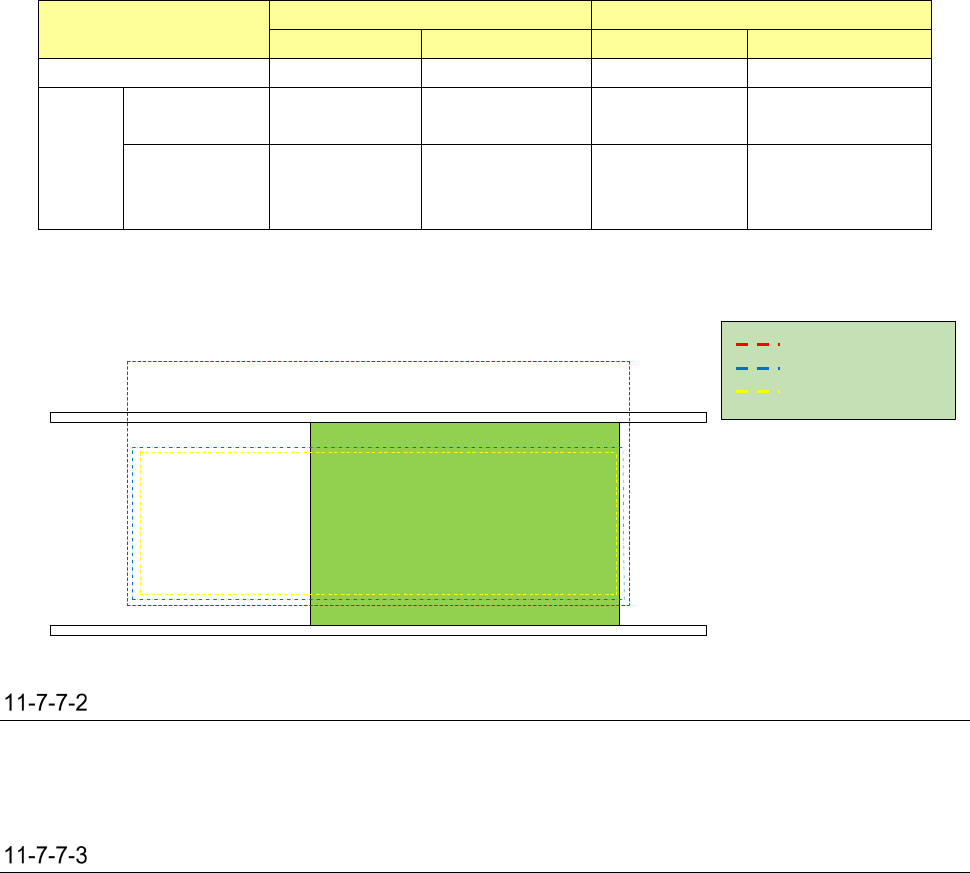
11-7-7-1-2 弯脚固定可能尺寸(基板 Y 方向尺寸较小时)
基板 Y 方向尺寸较小时如下表所示。
XY
方向
0°
/
180°
0°
/
180°
以外
负向方向
正向方向
负向方向
正向方向
X
方向
1mm
以上
409mm
以下
1mm
以上
409mm
以下
Y 方向
无 3D 传感器 16mm 以上
基板 Y 尺寸在
19mm
以下
29.5mm 以上
基板 Y 尺寸在
29mm
以下
有 3D 传感器 16mm 以上
基板
Y
尺寸在
19mm 以下
(301mm
以下
)
29.5mm 以上
基板
Y
尺寸在
29mm 以下
(301mm
以下
)
※ 基板左下端为基准时
※ 括号内为 Y 方向的最大坐标
メカリミット
ソフトリミット
クリンチ可能範囲
可传送的基板尺寸
安装了弯脚固定单元时,可传送的基板尺寸改变。
有关详细,请参照「第 01 章_装置概要」的「1-6 印刷基板规格」。
插入异常检测
因为弯脚固定元件不支撑基板,所以有时不能正确进行插入异常检测。
机械极限
软极限
弯脚固定可能范围
第 2 部 功能详解篇 第 11 章 选项组件
11-33
11-8 3D 传感器
11-8-1 概要
对插入元件进行图像定心的单元。
相当于以往机型的 VCS 单元、DFFPVCS。
11-8-2 机器设置
设置是否使用 3D 传感器。有关详细,请参照「第 07 章_机器设置」的「7-3-1-5 3D 传感器」。
11-8-3 程序编辑
设置 3D 传感器的识别条件参数以及识别元件的参数。有关参数设置,请参照「第 04 章_制作生产程
序」的「4-3-5 元件数据」。
是检查图像识别中是否能够执行元件定心的功能。有关详细,请参照「第 04 章_制作生产程序」的
「4-5-7 测量、检查」。
11-8-4 生产
执行使用 3D 传感器的图像识别动作。有关详细,请参照「第 02 章_生产」。
11-8-5 手动控制
可执行 3D 传感器的个别动作。有关详细,请参照「第 08 章_手动控制」的「8-6-7 3D 传感器控制」。
11-8-6 设备运行信息
可参照 3D 传感器的运行信息。有关详细,请参照「第 09 章_设备运行信息」的「9-4-4 3D 传感器运
行信息」。
11-8-7 自己诊断功能
可执行 3D 传感器的自己诊断动作。有关详细,请参照「第 10 章_自己诊断功能」的「10-3-3-3 3D
传感器沾污检查」、「 10-3-3-7 3D 传感器偏差」。
第 2 部 功能详解篇 第 11 章 选项组件
11-34
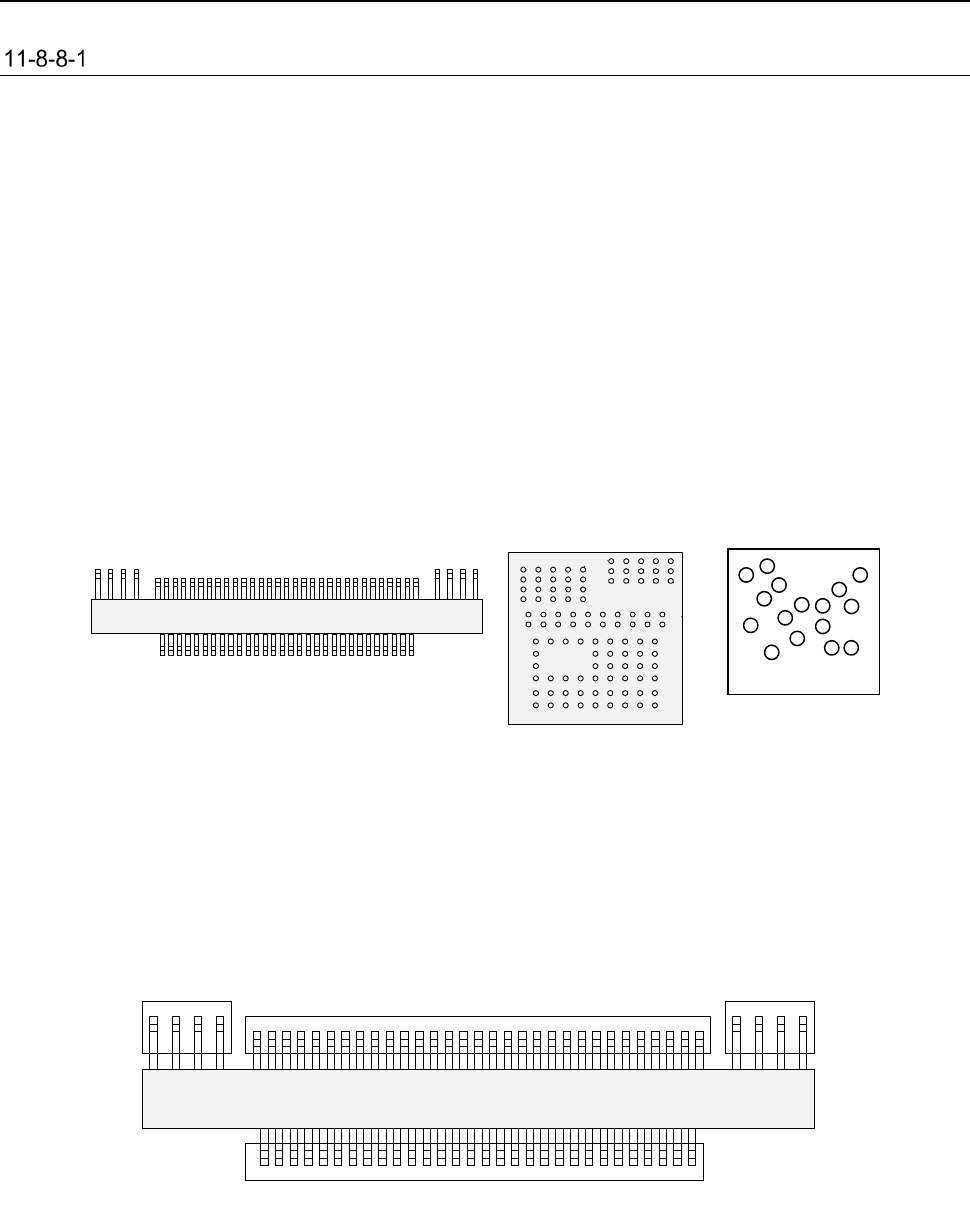
11-8-8 插入元件(扩展配列)
概要
记载了对元件种类为「插入元件」的图像元件的说明。
插入元件的图像元件沿用了以往机型的「通用图像元件」的「扩展配列元件」,所以对部分「通用图
像元件」进行说明。
将有多个间距的引脚元件、有多个尺寸引脚的元件、在任意位置有引脚的元件(称为
多引脚元件),
以及有多个配列的区域配列元件(称为
扩展配列元件)、在任意位置配置了球・小岛的元件(称为随
机配置元件)、 外形有角和边的元件(外形元件)这些元件种类,统称为通用图像元件。
● 将这些分别分类为副元件种类。
・多引脚元件 → 引脚元件类
・扩展配列元件、随机配置元件、插入元件(*1) → 球形元件类
・外形元件 → 外形元件类
相同识别要素(element)的集合称为 “要素组”。
所谓
要素,就是指一个引脚或者球,所谓要素组,就是指同样大小的要素(引脚或者球)的集合。
为通用图像元件时,排列相同的组作为 1 个要素组,根据相关各个要素组的定义,可以求出元件的中
心。
下图由 4 个要素组构成。
トップビュー
第 4エレメントグループ
第 3エレメントグループ
第 2エレメントグループ
第 1エレメントグループ
(*1) JM-100 所使用的「插入元件」为扩展配列元件。因此,不对应多引脚元件和外形识别元件。
在此,是为了说明通用图像才予以记载。
トップビュー
ランダム配置部品
リード部品類(マルチリード部品)
ボール部品類
(拡張アレイ部品)
ボトムビュー
第 4 要素组
第 3 要素组
第 2 要素组
第 1 要素组
俯视图
引脚元件类(多引脚元件)
球形元件类
(扩展配列元件)
随机配置元件
俯视图
仰视图