SM471PLUS_Admin(Chi_Ver2.3).pdf - 第103页
4-21 Tools 简化操作 (shortcut) 菜单 设备配置合理 : 指定设备的原点为基准原点。 前面喂料器座 ( 1 ) : 指定前置工序的喂料器组的原点为基准原点。 后面喂料器座 ( 2 ) : 指定后置工序的喂料器组的原点为基准原点。 状态表示领域 显示手动操作时发生的信息。 4.7.2. 头 TAP 对话框 利用 V ision System 手动 识 别部件, 设 定 Camera 的照明或 检查头部动作。 图 4…

4-20
Fast Chip Shooter SM471 PLUS Administrator’s Guide
宽度: 指定传送装置(Conveyor)的宽度驱动轴。
<头部装置> 组合框
利用<轴>组合框中选择的驱动电动机,移动到<位置>领域中设定的位置时,
选择该位置坐标基准的对象。可选择的对象如下。
基准相机1: 设定基于所述基准点照相机的位置的坐标。
头1 ~ 头10: 相对于1至10倍的位置头设置的位置坐标。
(SM421仅设置位置坐标根据1号?4头的位置。)
<速度水平> 领域
选择所选驱动电动机运行时的Speed Level。
可选择的速度级别如下。
1: 最快的速度驱动所选电动机。 (Fastest)
2: 快速驱动所选电动机。 (Fast)
3: 中速驱动所选电动机。 (Middle)
4: 慢速驱动所选电动机。(Slow)
5: 最慢的速度驱动所选电动机。 (Slowest)
<位置> 领域
用于输入所要移动位置的坐标或以所选装置为基准把对象移动到输入坐标位置
并获取该对象的当前坐标。 编辑框中输入的值如下。
X: X轴的坐标值
Y: Y 轴的坐标值
如果被选对象为输送机宽度调节电动机,应输入的不是Y坐标,是输送机宽
度。
Z: Z 轴坐标
R: Theta 轴角度
<移动> 按钮
以所选装置为基准把对象移动到输入坐标位置时使用。
<得到> 按钮
获取被选对象的当前位置(坐标或角度)其结果显示在状态表示领域。
<移到固定相机> 按钮
选择的对象移动到固定相机位置。
<装置> 组合框
选择基准原点的方式。 可选择的基准原点如下。
4-21
Tools
简化操作
(shortcut)
菜单
设备配置合理: 指定设备的原点为基准原点。
前面喂料器座(1): 指定前置工序的喂料器组的原点为基准原点。
后面喂料器座(2): 指定后置工序的喂料器组的原点为基准原点。
状态表示领域
显示手动操作时发生的信息。
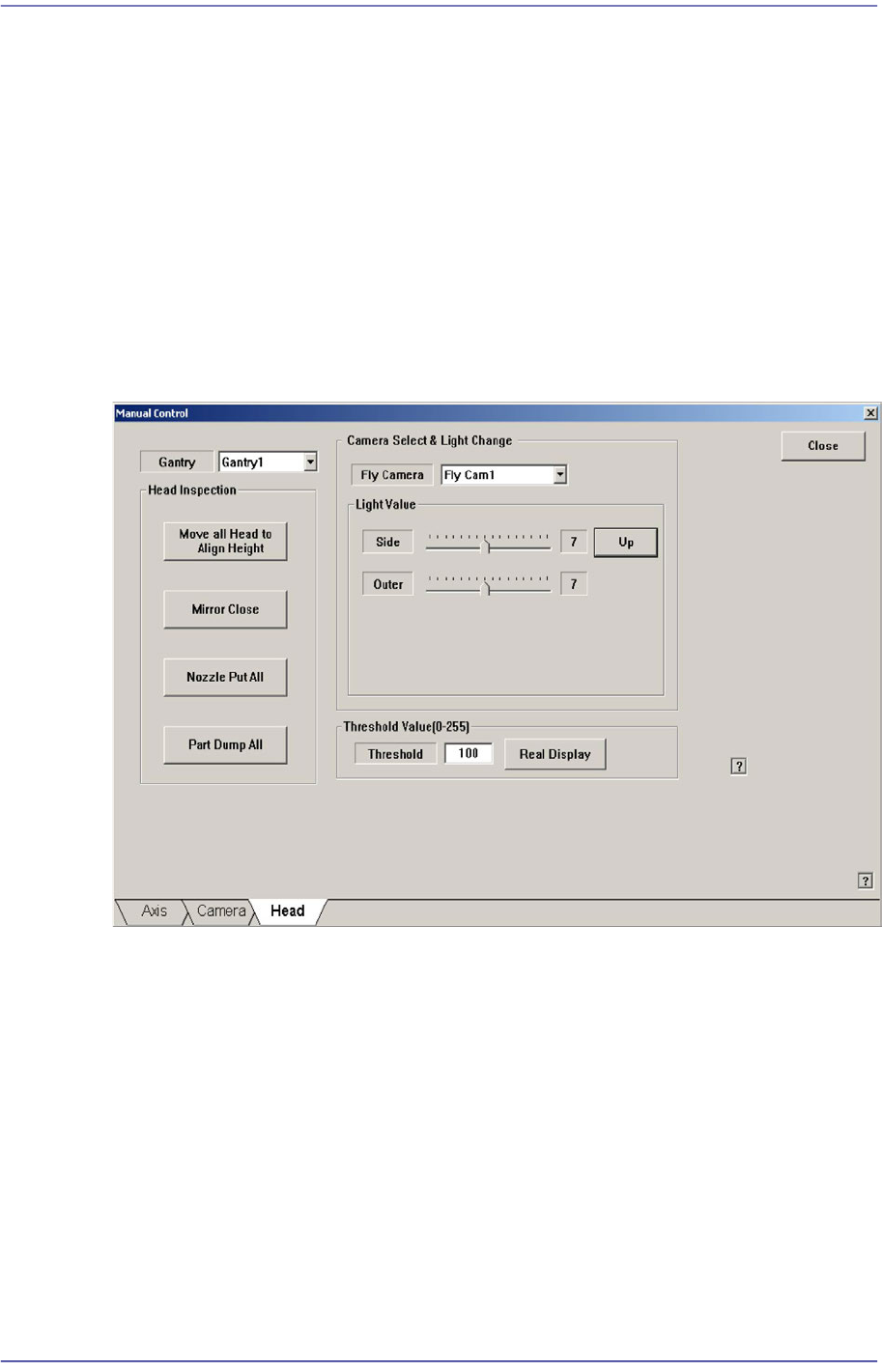
4.7.2. 头 TAP对话框
利用Vision System手动识别部件,设定Camera的照明或检查头部动作。
图
4.8 “
手动操作
–
头
”
对话框
<臂> 组合框
选择想要执行检查Head所属的Gantry。
<HEAD部检验> 领域
<向前移动/排列高度> 按钮
为部件识别,把所头部头的吸嘴末端对准Align 高度。
<镜子 打开/关闭> 按钮
为部件识别打开或关闭Mirror。
<放下全部吸嘴> 按钮
把所有贴装在磁头部的吸嘴返还到ANC。
4-22
Fast Chip Shooter SM471 PLUS Administrator’s Guide
<抛掉所有零件> 按钮
把所有吸附的部件扔到回收站。
<摄像选择&光线变化> 领域
设置飞行相机的照明值。选择想要调节照明的飞行相机后,在<高度值>中调整
滚动条调节亮度。
<限界值 [0-255]> 领域
通过’SMVision’窗口显示的影象由各个像素构成。各个像素因显示亮度不同,有
0~255的固有值。在这里‘限界值’是指区分各个像素识别成白色还是黑色的临界
值。在上图中MMI设置成大于等于100时识别为白,小于100则识别为黑色。
<真实显示 / 二元的>按钮
通过’SMVision’窗口显示的影象显示成实际肉眼可看到的、或 MMI识别的
影象(Binary)。
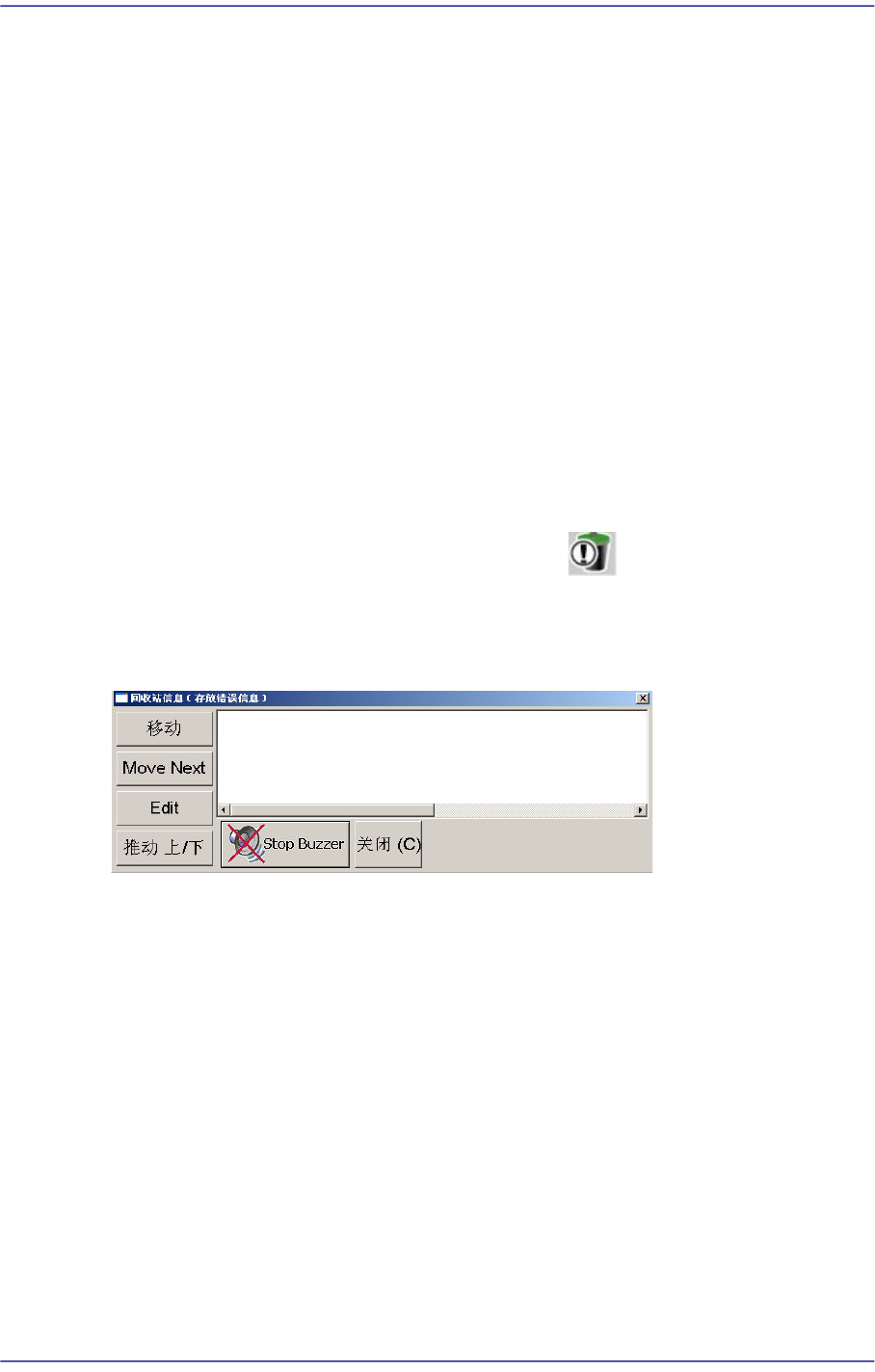
4.8. Dump Imformation(Place Error Information)
确认因贴装错误废弃的部件和显示有关喂料器内容的信息窗时使用。
图
4.9 “Dump Imformation(Place Error Information)”
对话框
<移动>键
把Fiducial Camera移动到发生了错误的喂料器的位置。
<Move Next>键
发生了几个错误时,把Fiducial Camera移动到发生了下一个错误的喂料器的位
置。
<Edit>键
可以打开“Feeders”对话窗口后针对Tape Feeder、Stick Feeder及Tray Feeder的相
关数据进行编辑。详细内容请参阅“8.1 Feeder [F4] (8-1
页
)”。
<推动 上/下>键
在列表框中选择发生错误的喂料器后进行Feeding。