SM471PLUS_Admin(Chi_Ver2.3).pdf - 第350页
13-22 Fast Chip Shooter SM471 PLUS Admini st rator’s Guide 13.3.4. Common XY Calibration 使两个拱架之间的坐标系互相一致的过程。 不正确时将导致拱架 1F 与拱架 1R 之间 出现偏差, 对贴片精度造成影响, 甚至引起拱架碰撞。 图 13.8 “Gantry-to-Gantry Common XY’ 对话框 < 自动下一步 > 复选框…
13-21
Machine Calibration
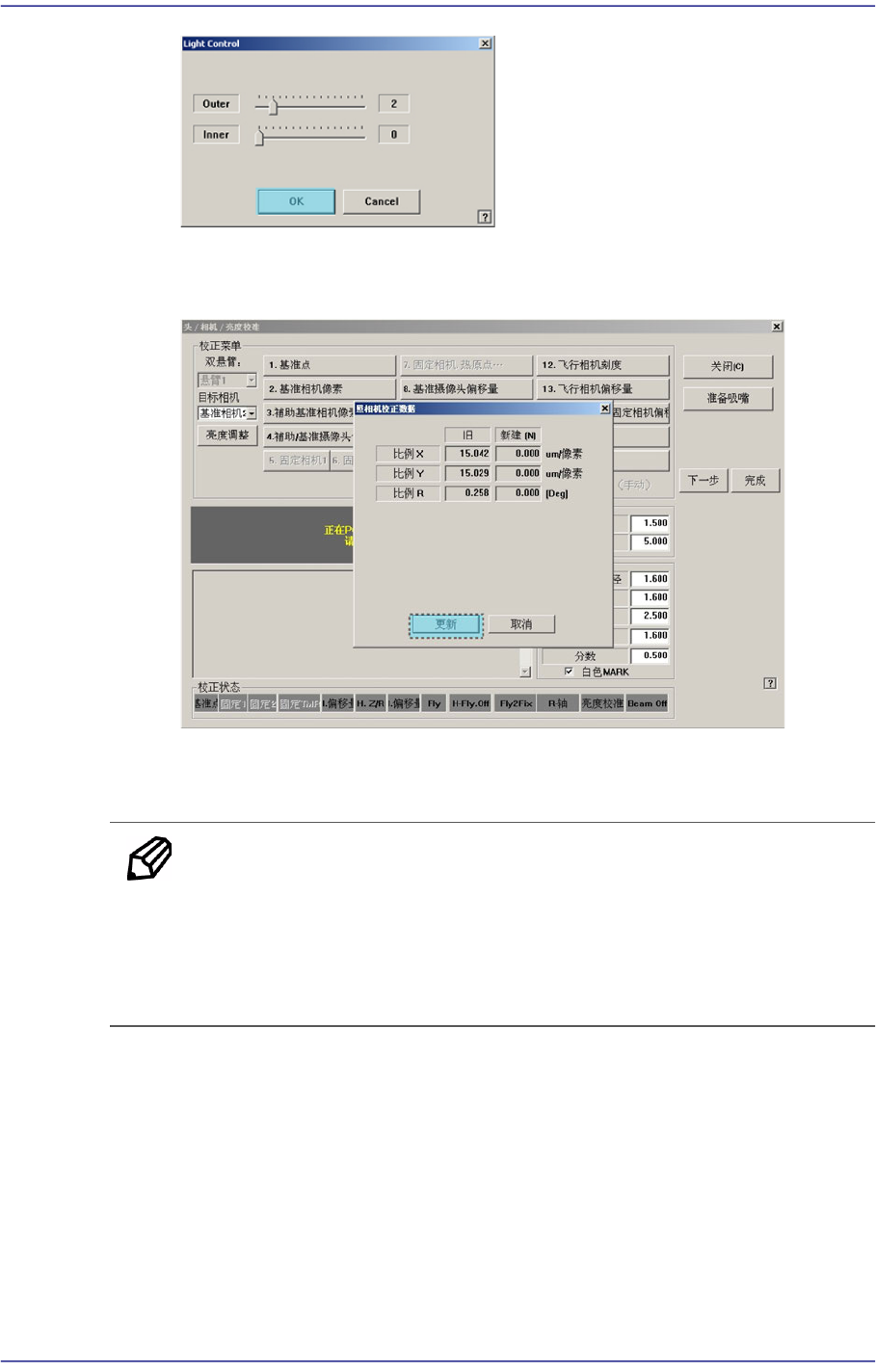
4. 自动执行 Calibration后,结束校正则如下图显示结果值。要适用新的校正值
请点击<更新>按钮。
5. 每个悬臂使用2个基准相机时,单击<3. Other Fid. Camera Scale>键后按照
同一方法实行校准(Calibration)。
备 注 基准照相机测量(FOV 7.5)的校正基准值如下。
ScaleX:13.0 ~ 17.0(μm/pixel)
ScaleY: 13.0 ~ 17.0(μm/pixel)
ScaleR: -0.5 ~ 0.5(deg)
13-22
Fast Chip Shooter SM471 PLUS Administrator’s Guide
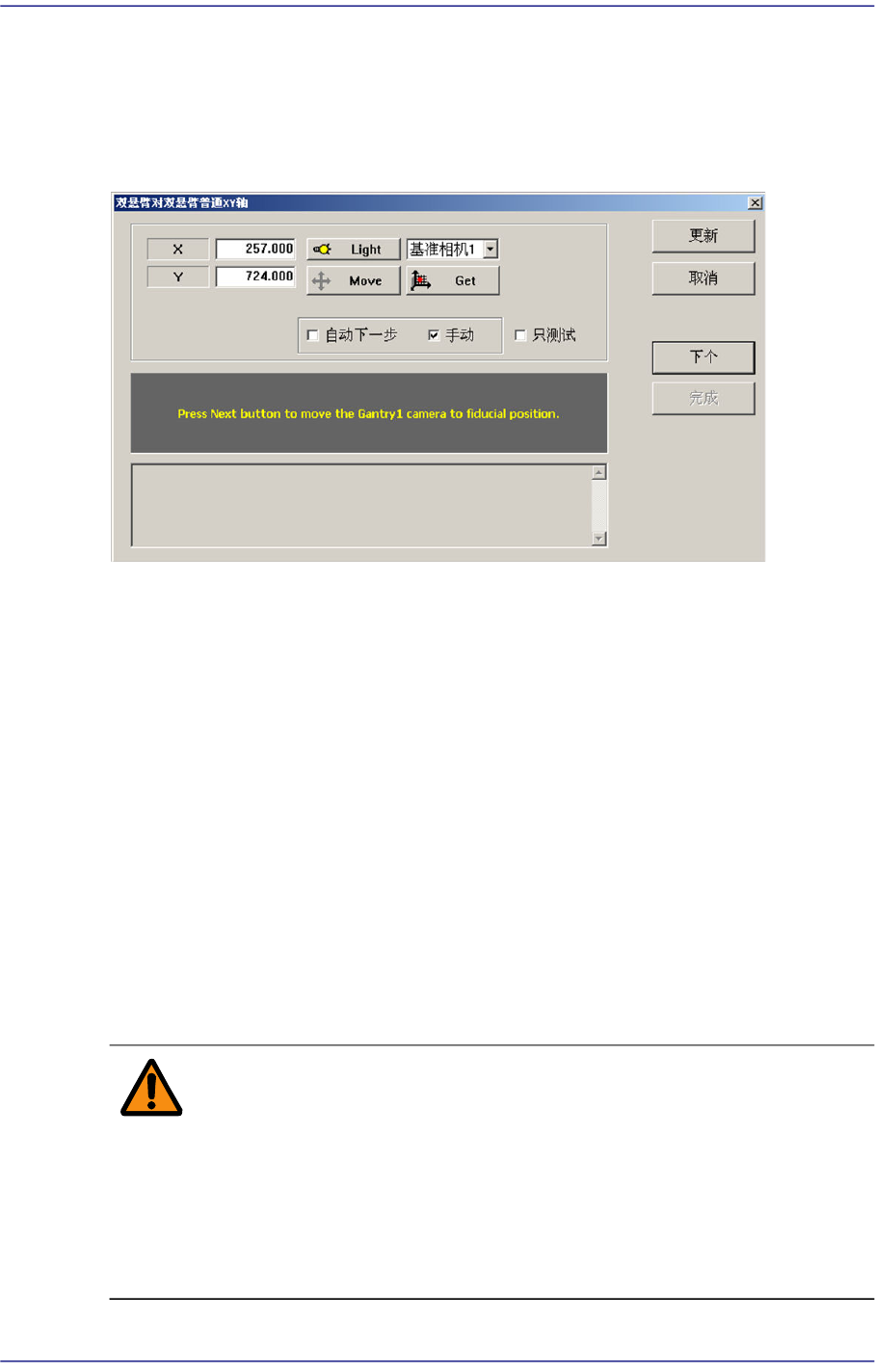
13.3.4. Common XY Calibration
使两个拱架之间的坐标系互相一致的过程。不正确时将导致拱架1F 与拱架1R之间
出现偏差,对贴片精度造成影响,甚至引起拱架碰撞。
图
13.8 “Gantry-to-Gantry Common XY’
对话框
<自动下一步> 复选框
选择此选择框后点击<下个>按钮自动执行各Gantry间坐标系一致化的过程。
<手动> 复选框
使用Teaching Box把各Gantry移动到指定的位置后手动执行各Gantry间坐标系
的一致化过程。
<测试专用> 选择框
选定后进行校准,将不储存结果而只显示该值。因此可以与之前数据作比较后,
检查当前设备的变化状态。
<Device> 组合框
请选择想要移动的基准相机。
<Move> 按钮
移动选定Gatry的基准相机。
警 告 由于非指定或未经培训的操作人员错误操作设备,或校正前没有
进行全部检查,可能导致设备发生严重损伤,设置的数据被严重
破坏,而且造成操作人员和设备附近其他人员受伤。
校正前一定要检查要校正的项目并确认设备周围是否有任何其
他工作人员。
校正只能由指定的受过培训的人员进行。
13-23
Machine Calibration
<Light> 按钮
内部
调节选定拱架的摄像头的 内部照明亮度。
外部
调节选定拱架的摄像头的外部照明亮度。
13.3.4.1. Procedure
自动设置方法如下。
1. 点击<Move>按钮把基准相机移动到指定的位置。
2. 利用Teaching Box调整基准相机位置,使’SMVision’窗口上显示的十字线中心和
conveyer上预先设置的Fiducial Mark的中心一致。 此时,此位置应是所有Gantry
的 Camera可以移动的位置。
3. 点击<Get>按钮反应当前坐标值
4. 选择<自动下一步>选择框后,点击<下个>按钮会自动执行相同的动作。
5. 正常完成以后点击<更新>按钮。
手动设置方法如下。
1. 点击<Move>按钮把基准相机移动到指定的位置。
2. 利用示教框调整基准相机位置使’SMVision’窗口上显示的十字线中心和
conveyer上预先设置的Fiducial Mark的中心一致。此时,此位置应是所有Gantry
的 Camera可以移动的位置。
3. 点击<Get>按钮反应当前坐标值。
4. 用同样的方法把其他Gantry也从阶段1移动到指定的位置后,准确调整位置。
5. 点击<Get>按钮反应当前坐标值。
6. 等待Gantry移动到Home位置后,再自动感知碰撞感应器后,再回到原点为止。
注 意 双重轴原点偏移调节校准必须在 Gantry Mapping执行之前
(Disable 状态)实行。如果 Gantry Mapping已被激化(Enable),
则使它非激活(Disable)后,再执行双重轴原点偏移调节 校准。