SM471PLUS_Admin(Chi_Ver2.3).pdf - 第376页
13-48 Fast Chip Shooter SM471 PLUS Admini st rator’s Guide 2. 在 <Grid> 领域中 选择执行校正的 Head Z 轴后, 选 择 <Automatic> 校验框, 之后 点击 <Detect Z Offset> 按钮。 (在此任意设置成 Head1 ) 3. 那么 Head 会自动 移 动到 ANC 上的指 定位置。 之后设备产生空压从…
13-47
Machine Calibration
备 注 Fiducial Camera Offset (FOV 7.5)的校正基准值如下。
Camera Offset
Offset X : -189.5mm ~ -187.5mm
Offset Y : -1.0mm ~ 1.0mm
13.3.10.3. Head Z / R Offset Calibration
PCB顶面到Z轴Home的距离是机械设置的。Z Offset 校正为以PCB顶面基准,利用
空压测量对此距离的Offset。
R Offset 校正为以吸嘴支撑架0度基准进行整列,测量对角度的Offset。
以下是执行Z Offset 校正的过程,使用的吸嘴为校正用CN040吸嘴。
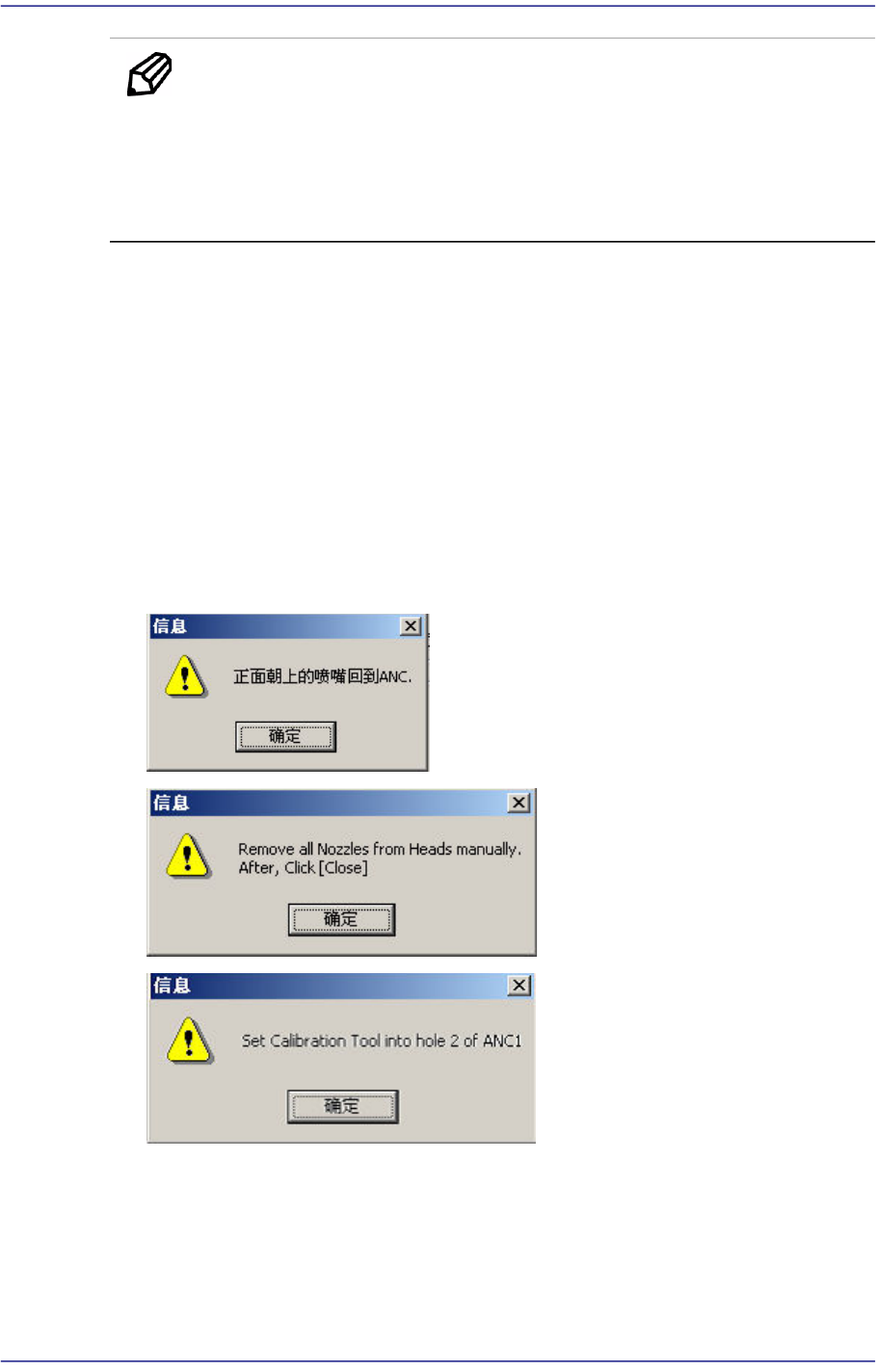
1. 点击<准备吸嘴>按钮,手动清除插入在所有Head吸嘴支撑架的吸嘴后把
CN040吸嘴插入到ANC的2号孔中。Gantry1时前面ANC的2号孔、 Gantry2时
后面ANC的2号孔中插入CN040吸嘴。
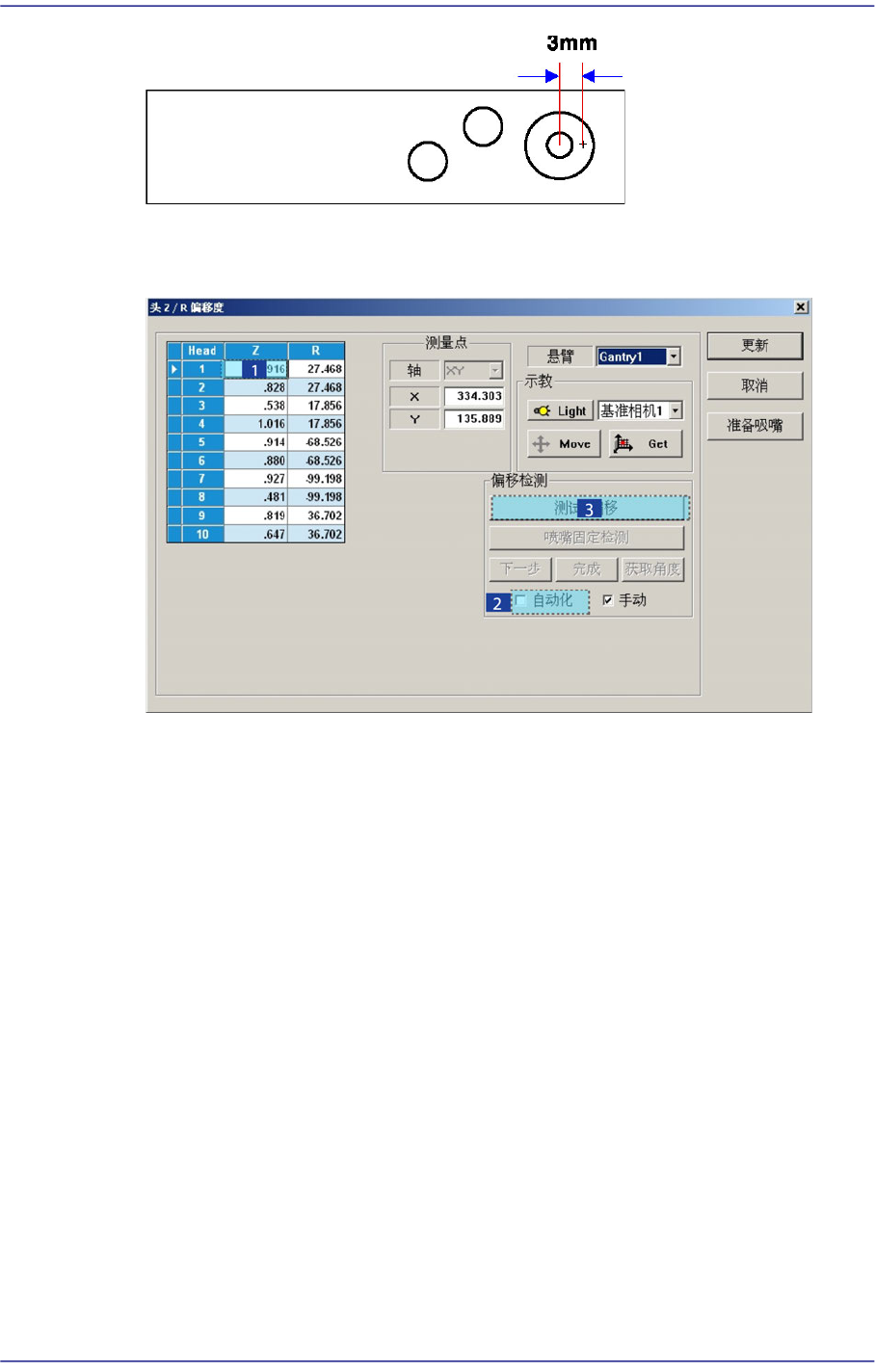
测量Z Offset的位置为从前面ANC的校正 Tool位置(中心)脱离3mm处,如果
此处有异物或校正 Tool时,请预先清除。
13-48
Fast Chip Shooter SM471 PLUS Administrator’s Guide
2. 在<Grid>领域中选择执行校正的Head Z轴后,选择<Automatic> 校验框,之后
点击<Detect Z Offset>按钮。(在此任意设置成Head1)
3. 那么Head会自动移动到ANC上的指定位置。之后设备产生空压从Head1号开始
到Head10依次自动下降Spindle的同时执行校正。
4. 完成校正后自动把结果反应在<Grid>领域的Z列上。手动进行时,手动给各
Head上依次插入CN040后,在Vacuum对话框中确认Head的空压状态的同时下
降Spindle执行校正。
5. 完成对Gantry1的校正后在<Gantry> 组合框中选择’Gantry2’以相同的方法执行
校正。
13-49
Machine Calibration
6. 单击<Update>键把校准结果反映到设备。
备 注 正常的Z偏移值如下。
Head1~ Head20: -1.5 ~ 1.5 mm
若Z Offset值超出该范围,则说明磁头有严重的器具性问题,需
要确认home位置、主轴、LM和电动机的工作是否正常。
下面介绍R Offset Calibration执行方法。
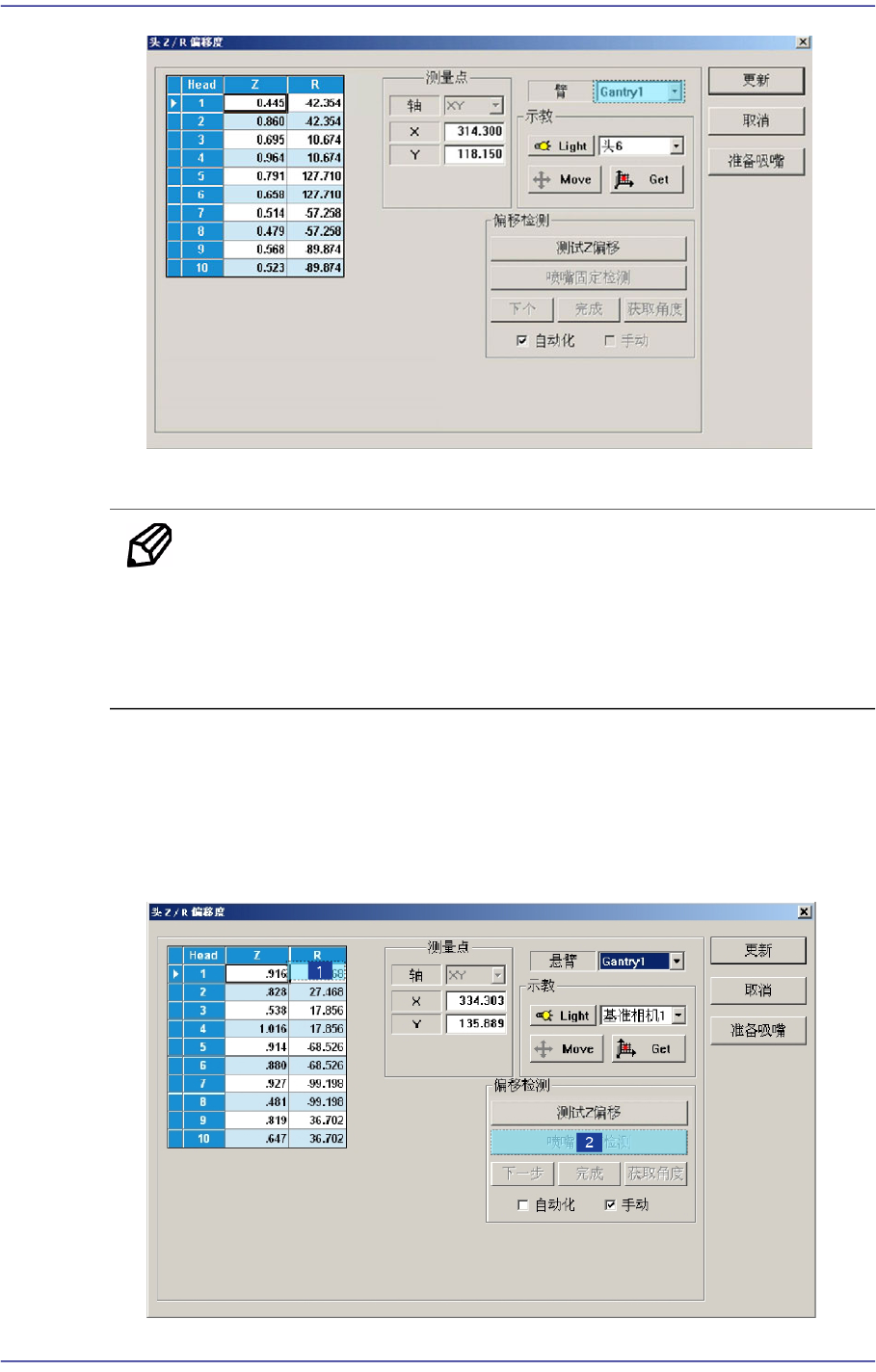
1. 需要在<Grid>领域执行校正的Head的R轴值输入“0”。
2. 在<Grid> 领域点击要执行校正Head的R轴,再点击 <喷嘴固定检测>按钮。 (在
这里任意用 Head 1设定)