SM471PLUS_Admin(Chi_Ver2.3).pdf - 第378页
13-50 Fast Chip Shooter SM471 PLUS Admini st rator’s Guide 3. 显示 “ 请检测和记录喷嘴 CNT0 到 ANC1-2 洞。 首先, 我们必须把所有喷嘴手动 离开朝向 将 Z 轴调制 低处, 点击 [ 下一步 ]” 消息。 为手动除去所有贴装在磁头的 吸嘴, 拉下磁头的 Z 轴请点击 < 下个 > 按钮。 此时虚拟吸嘴 CNT0 设置在 ANC 的 1 号孔, 认定…
13-49
Machine Calibration
6. 单击<Update>键把校准结果反映到设备。
备 注 正常的Z偏移值如下。
Head1~ Head20: -1.5 ~ 1.5 mm
若Z Offset值超出该范围,则说明磁头有严重的器具性问题,需
要确认home位置、主轴、LM和电动机的工作是否正常。
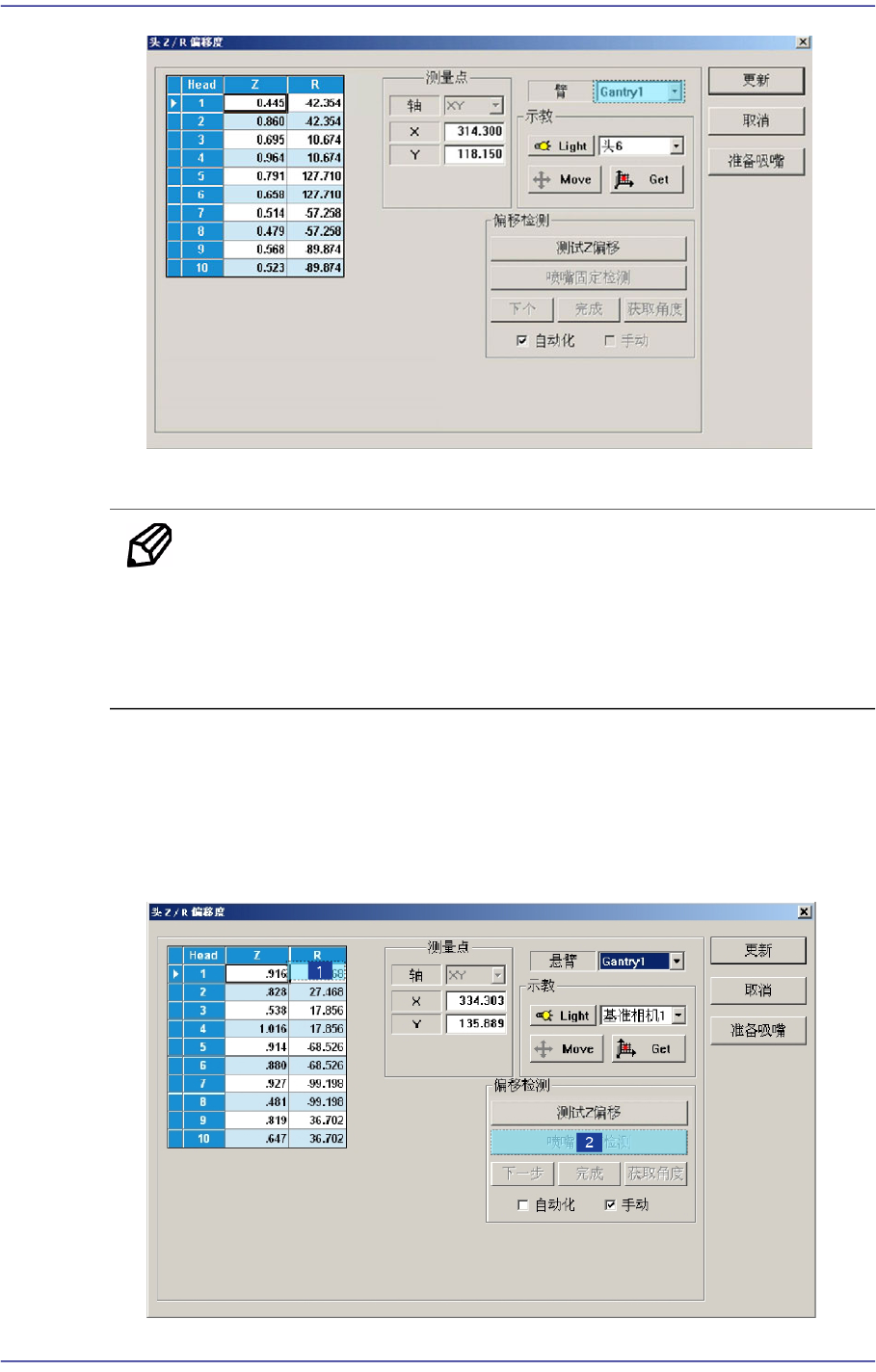
下面介绍R Offset Calibration执行方法。
1. 需要在<Grid>领域执行校正的Head的R轴值输入“0”。
2. 在<Grid> 领域点击要执行校正Head的R轴,再点击 <喷嘴固定检测>按钮。 (在
这里任意用 Head 1设定)
13-50
Fast Chip Shooter SM471 PLUS Administrator’s Guide
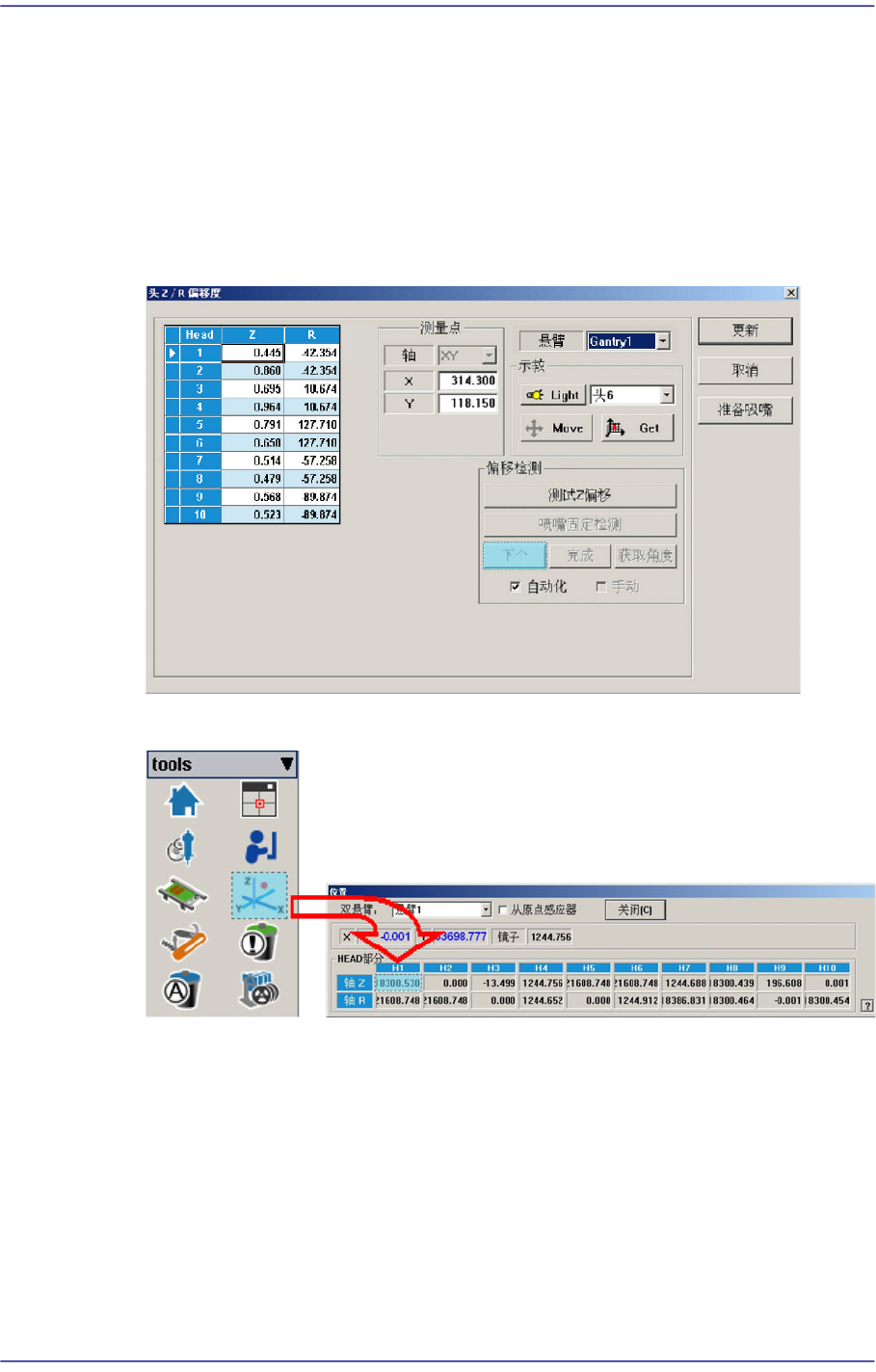
3. 显示“请检测和记录喷嘴CNT0到 ANC1-2洞。首先,我们必须把所有喷嘴手动
离开朝向 将Z轴调制低处,点击[下一步]”消息。 为手动除去所有贴装在磁头的
吸嘴,拉下磁头的Z轴请点击 <下个>按钮。
此时虚拟吸嘴CNT0设置在ANC的1号孔,认定相应Head把CNT0吸嘴Pick。
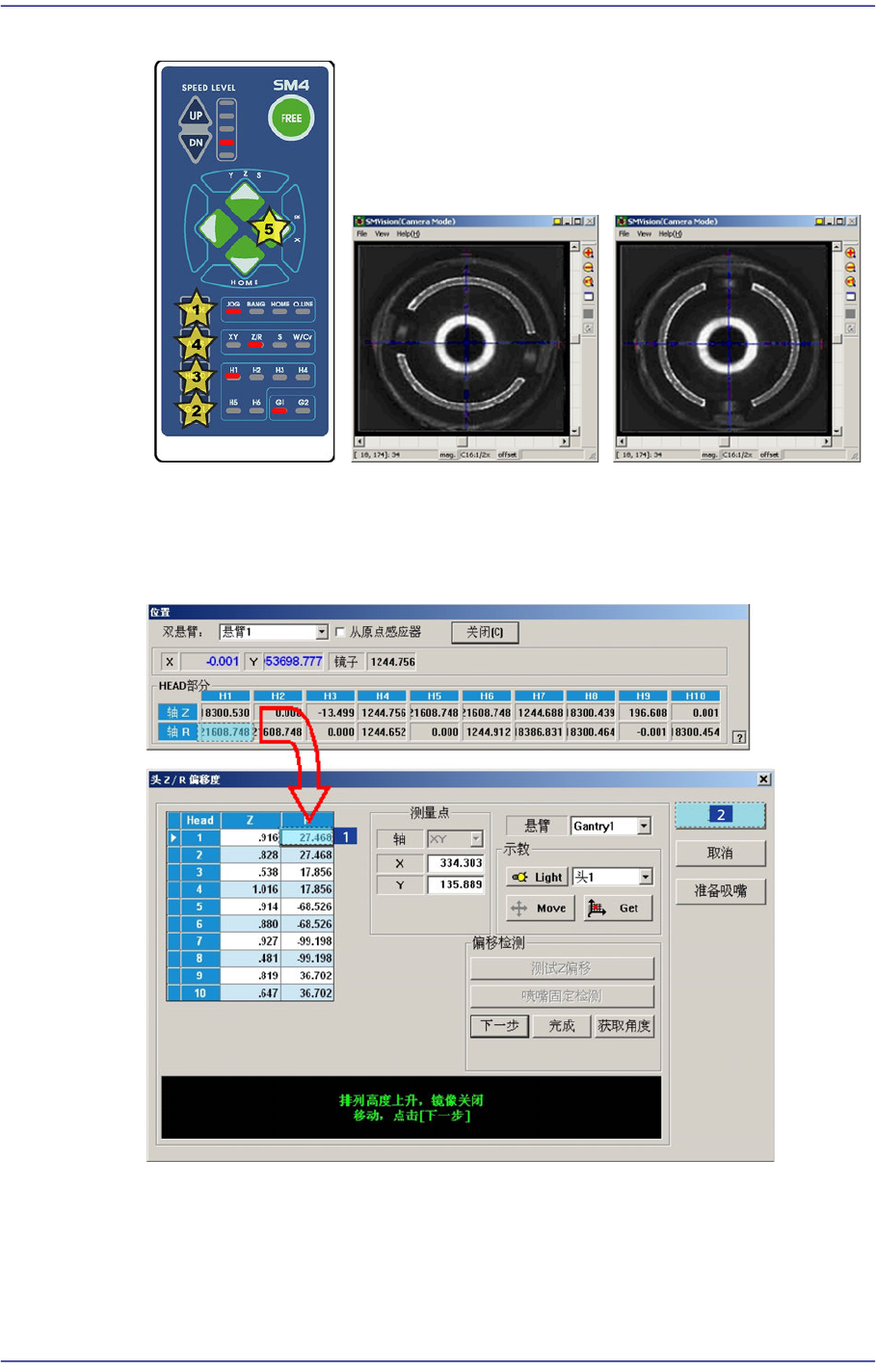
4. 显示“排列高度上升,镜像关闭移动,点击[下一步]”的信息。此时为了在飞行相
机上看见Head吸嘴支撑架,把Spindle上升到可以识别部件的高度后,为了关闭
Mirror点击<下个>按钮。
5. 打开<当前位置>窗口。
6. 利用示教盒使吸嘴座形状成'( )',R轴方向旋转转轴。 此时,机械连动的磁头.吸
嘴座朝相同方向。
13-51
Machine Calibration
即如上图所示利用齿垢1~2号,3~4号,5~6号,7~8号,9~10号磁头器具上应组
装为相同的组装方向。
7. 此时输入所要适用的R轴<当前位置>值并进行升级。
8. 同样地测定Head 2 ~ Head 10 。
9. 完成对Gantry1的校正后在<Gantry> 组合框中选择’Gantry2’以相同的方法执行
校正。
10. 校正结果适用在设备时点击<更新>按钮。