5TROUBLESHOOTING_.pdf - 第102页
3.3 . 1 Reset Procedure from Component Recognition Error ( 1 L 32 — ) Order of Error Codes ( Display C ) _ ( Display A ) _ ( Display B ) ■ ( Cause ) . ( Remedy ) ( Display C ) 1 L 32 B 001 ( Display A ) Angle Detection E…
3.3
.
1
Reset
Procedure
from
Component
Recognition
Error
(
1
L
14
—
)
Order
of
Error
Codes
(
Display
C
)
•
(
Display
A
)
-
(
Display
B
)
_
(
Cause
)
•
(
Remedy
)
(
Display
C
)
1
L
145101
(
Display
A
)
Number
of
Leads
Error
1
L
14
•
•
•
•
(
Display
B
)
NUMBER
OF
THE
RANGE
LEADS
(
I
OF
SETT
(
UPPER
)
EXCEEDS
ING
.
(
Display
C
)
1
L
145201
(
Display
A
)
Number
of
Leads
Error
(
Display
B
)
NUMBER
OF
LEADS
(
LEFT
)
EXCEEDS
THE
RANGE
OF
SETTING
.
(
Display
C
)
1
L
145301
(
Display
A
)
Number
of
Leads
Error
(
Display
B
)
NUMBER
OF
LEADS
(
LOWER
)
EXCEEDS
THE
RANGE
OF
SETTING
.
(
Display
C
)
1
L
145401
(
Display
A
)
Number
of
Leads
(
Display
B
)
NUMBER
OF
LEADS
(
RIGHT
)
EXCEEDS
THE
RANGE
OF
SETTING
.
Error
(
Cause
1
)
Wrong
parameters
(
number
of
leads
)
are
set
for
the
selected
component
.
(
Remedy
1
)
Check
the
selected
boxes
of
the
label
1
If
wrong
parameters
are
set
in
the
component
library
data
,
correct
them
.
nent
and
the
paramters
set
in
the
"
1
”
,
"
2
"
,
”
3
"
,
and
"
4
"
text
l
compoi
"
NUMB
ER
OF
LEADS
”
in
the
component
library
data
.
(
Display
C
)
1
L
30
B
001
(
Display
A
)
Picked
Posture
Error
(
Display
B
)
ERROR
OF
PICK
-
UP
ANGLE
WAS
MORE
THAN
ACCEPTABLE
.
1
L
30
•
…
(
Display
C
)
1
L
30
B
002
(
Display
A
)
Picked
Posture
Error
(
Display
B
)
ERROR
OF
PICK
-
UP
X
POSITION
WAS
MORE
THAN
ACCEPTABLE
.
(
Display
C
)
1
L
33
B
003
(
Display
A
)
Picked
Posture
Error
(
Display
B
)
ERROR
OF
PICK
-
UP
Y
POSITION
WAS
MORE
THAN
ACCEPTABLE
.
(
Cause
1
)
When
a
component
is
picked
up
,
the
pick
-
up
positions
(
X
and
Y
)
and
angle
have
shifted
greatly
from
the
correct
ones
.
(
Cause
2
)
When
the
tape
is
fed
,
a
component
is
turned
vertically
.
(
Remedy
1
)
Check
the
selected
component
and
the
tape
feeder
.
Check
if
the
feeder
(
B
)
offset
data
is
correct
.
Check
if
the
component
library
data
is
correct
.
(
Remedy
2
)
Check
the
selected
component
and
the
tape
feeder
.
(
Display
C
)
1
L
31
B
001
(
Display
A
)
Center
of
Gravity
Detection
Error
(
Display
B
)
RECOGNITION
ABORTED
BECAUSE
OF
IMPROPER
COMPONENT
HANDLING
.
1
L
31
•
…
(
Cause
1
)
An
improper
vacuum
nozzle
is
selected
for
the
component
or
vice
versa
.
(
Cause
2
)
The
component
is
bent
due
to
weak
vacuum
suction
force
.
(
Remedy
1
)
Check
the
selected
component
and
vacuum
nozzle
.
(
Remedy
2
)
Check
the
vacuum
pressure
.
3
-
10
9910
-
001
ACP
01
EERW
3
-
10
3.3
.
1
Reset
Procedure
from
Component
Recognition
Error
(
1
L
32
—
)
Order
of
Error
Codes
(
Display
C
)
_
(
Display
A
)
_
(
Display
B
)
■
(
Cause
)
.
(
Remedy
)
(
Display
C
)
1
L
32
B
001
(
Display
A
)
Angle
Detection
Error
1
L
32
•
…
(
Display
B
)
RECOGNITION
ABORTED
BECAUSE
OF
IMPROPER
COMPONENT
HANDLING
.
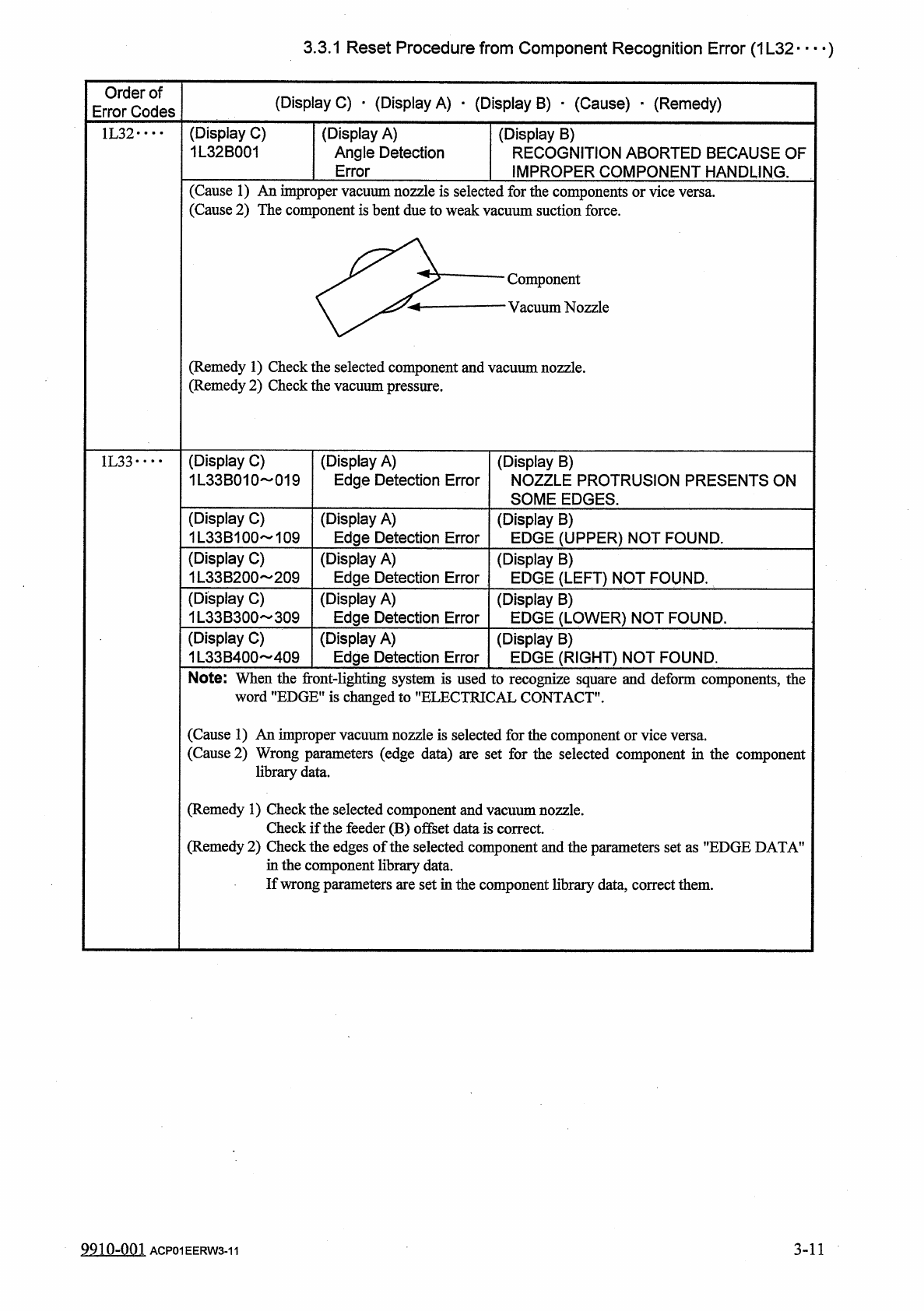
(
Cause
1
)
An
improper
vacuum
nozzle
is
selected
(
Cause
2
)
The
component
is
bent
due
to
weak
vac
forth
uums
e
components
or
vice
versa
.
;
uction
force
.
Component
Vacuum
Nozzle
(
Remedy
1
)
Check
the
selected
component
and
vacuum
nozzle
.
(
Remedy
2
)
Check
the
vacuum
pressure
.
(
Display
C
)
1
L
33
B
010
019
(
Display
A
)
Edge
Detection
Error
1
L
33
•
•
•
•
(
Display
B
)
NOZZLE
PROTRUSION
PRESENTS
ON
SOME
EDGES
.
(
Display
C
)
1
L
33
B
100
109
(
Display
A
)
Edge
Detection
Error
(
Display
B
)
EDGE
(
UPPER
)
NOT
FOUND
.
(
Display
C
)
1
L
33
B
200
~
209
(
Display
A
)
Edge
Detection
Error
(
Display
B
)
EDGE
(
LEFT
)
NOT
FOUND
.
(
Display
C
)
1
L
33
B
300
309
(
Display
A
)
Edge
Detection
Error
(
Display
B
)
EDGE
(
LOWER
)
NOT
FOUND
.
(
Display
C
)
1
L
33
B
400
409
(
Display
A
)
Edge
Detection
Error
(
Display
B
)
EDGE
(
RIGHT
)
NOT
FOUND
.
Note
:
When
the
front
-
lighting
system
is
used
to
recognize
square
and
deform
components
,
the
word
"
EDGE
"
is
changed
to
"
ELECTRICAL
CONTACT
"
.
(
Cause
1
)
An
improper
vacuum
nozzle
is
selected
for
the
component
or
vice
versa
.
(
Cause
2
)
l
parameters
(
edge
data
)
are
set
for
the
selected
component
in
the
component
data
.
(
Remedy
1
)
Check
the
selected
component
and
vacuum
nozzle
.
Check
if
the
feeder
(
B
)
offset
data
is
correct
(
Remedy
2
)
Check
the
edges
of
the
selected
component
and
the
parameters
set
as
"
EDGE
DATA
’
in
the
component
library
data
.
If
wrong
parameters
are
set
in
the
component
library
data
,
correct
them
.
9910
-
001
ACP
01
EERW
3
-
11
3
-
11
3.3
.
1
Reset
Procedure
from
Component
Recognition
Error
(
1
L
34
)
Order
of
Error
Codes
(
Display
C
)
•
(
Display
A
)
•
(
Display
B
)
•
(
Cause
)
•
(
Remedy
)
(
Display
C
)
1
L
34
B
020
029
(
Display
A
)
Corner
Detection
Error
1
L
34
••
•
•
(
Display
B
)
NOZZLE
PROTRUSION
OCCUPIES
MORE
THAN
2
CORNERS
.
(
Display
C
)
1
L
34
B
030
039
(
Display
A
)
Corner
Detection
Error
(
Display
B
)
RECOGNITION
ABORTED
BECAUSEjOF
lMPROPER
COMPONENT
HANDLING
.
(
Display
C
)
1
L
34
B
500
509
(
Display
A
)
Corner
Detection
Error
(
Display
B
)
CORNER
(
UPPER
-
LEFT
)
NOT
FOUND
.
(
Display
C
)
1
L
34
B
600
609
(
Display
A
)
Corner
Detection
Error
(
Display
B
)
CORNER
(
LOWER
:
LEFT
)
NOT
FOUND
.
(
Display
C
)
1
L
34
B
700
709
(
Display
A
)
Comer
Detection
Error
(
Display
B
)
CORNER
(
UPPER
-
RIGHT
)
NOT
FOUND
.
(
Display
C
)
1
L
34
B
800
809
(
Display
A
)
Corner
Detection
Error
(
Display
B
)
CORNER
(
LOWER
-
RIGHT
)
NOT
FOUND
.
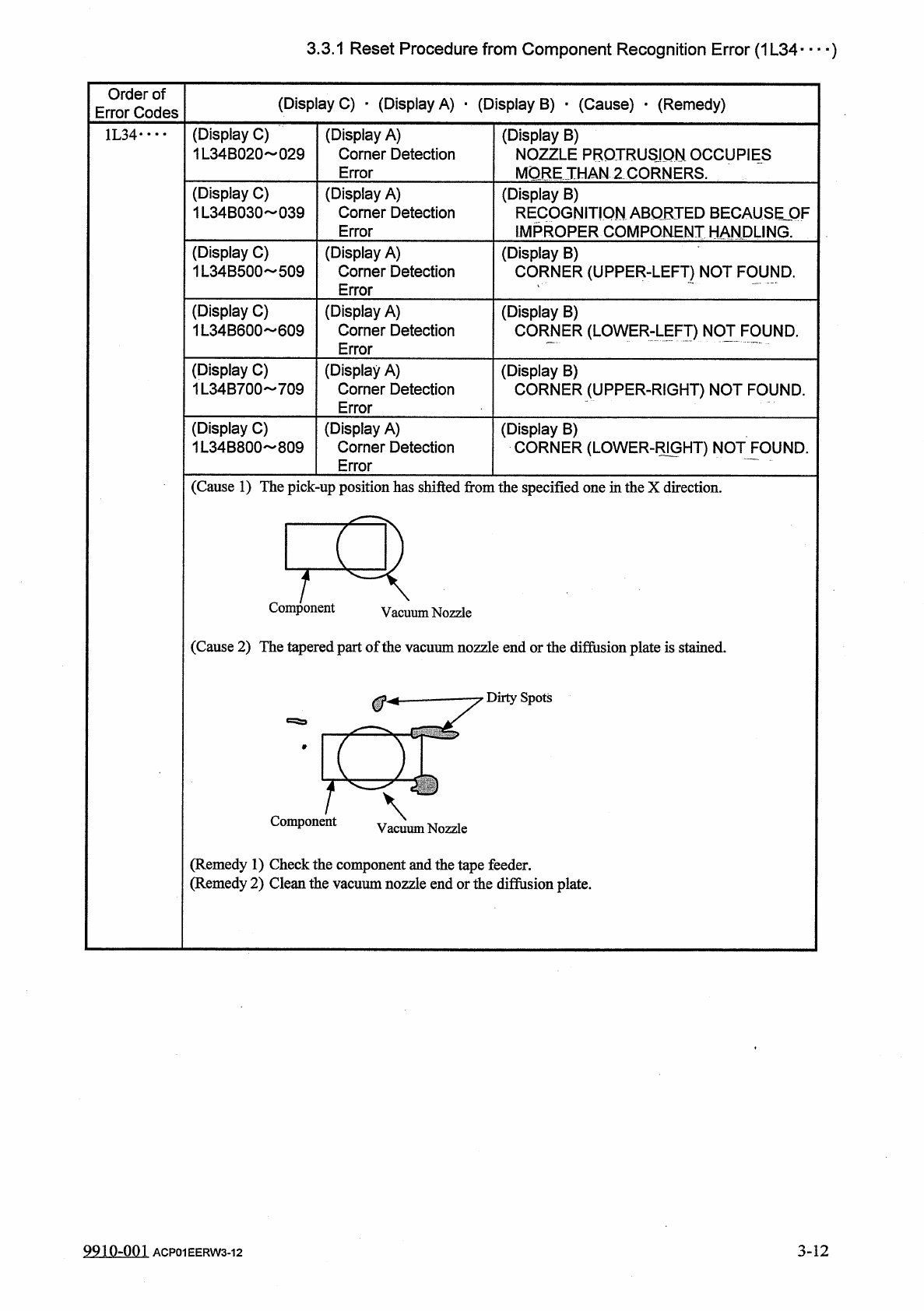
(
Cause
1
)
The
pick
-
up
position
has
shifted
from
the
specified
one
in
the
X
direction
.
Component
Vacuum
Nozzle
(
Cause
2
)
The
tapered
part
of
the
vacuum
nozzle
end
or
the
diffusion
plate
is
stained
.
Dirty
Spots
Component
(
Remedy
1
)
Check
the
component
and
the
tape
feeder
.
(
Remedy
2
)
Clean
the
vacuum
nozzle
end
or
the
difiusion
plate
.
9910
-
001
ACP
01
EERW
3
-
12
3
-
12