DEUKYX-193-4110_G5S2_VOL4.pdf - 第370页
在线预览 DEUKYX-193-4110_G5S2_VOL4.pdf PDF 文档。

DEUKYX
193-4110
Kapitel 5
Fehlerbehebung bei der Bauteilaufnahme
und -platzierung
In diesem Kapitel wird die Fehlerbehebung bei der Bauteilaufnahme
und -platzierung beschrieben.
1. Klassizierung der Fehler und Lösungsvorschläge
2. Fehlerbehebung bei Aufnahmefehlern
3. Fehlerbehebung bei Bestückungsfehlern
DEUKYX
5-1193-4110
1. Klassizierung der Fehler und Lösungsvorschläge
1. Klassizierung der Fehler und Lösungsvorschläge
1.1 Klassizierung der Fehler
Der Maschinenprozess kann in Prozesse A, B, C, D und E unterteilt werden, wie
unten dargestellt.
Referenz
Unter „4. Ablauf der oberächenmontierten Bestückung“ in „Kapitel 1 (Band 1:
Führung)“ nden Sie weitere Informationen.
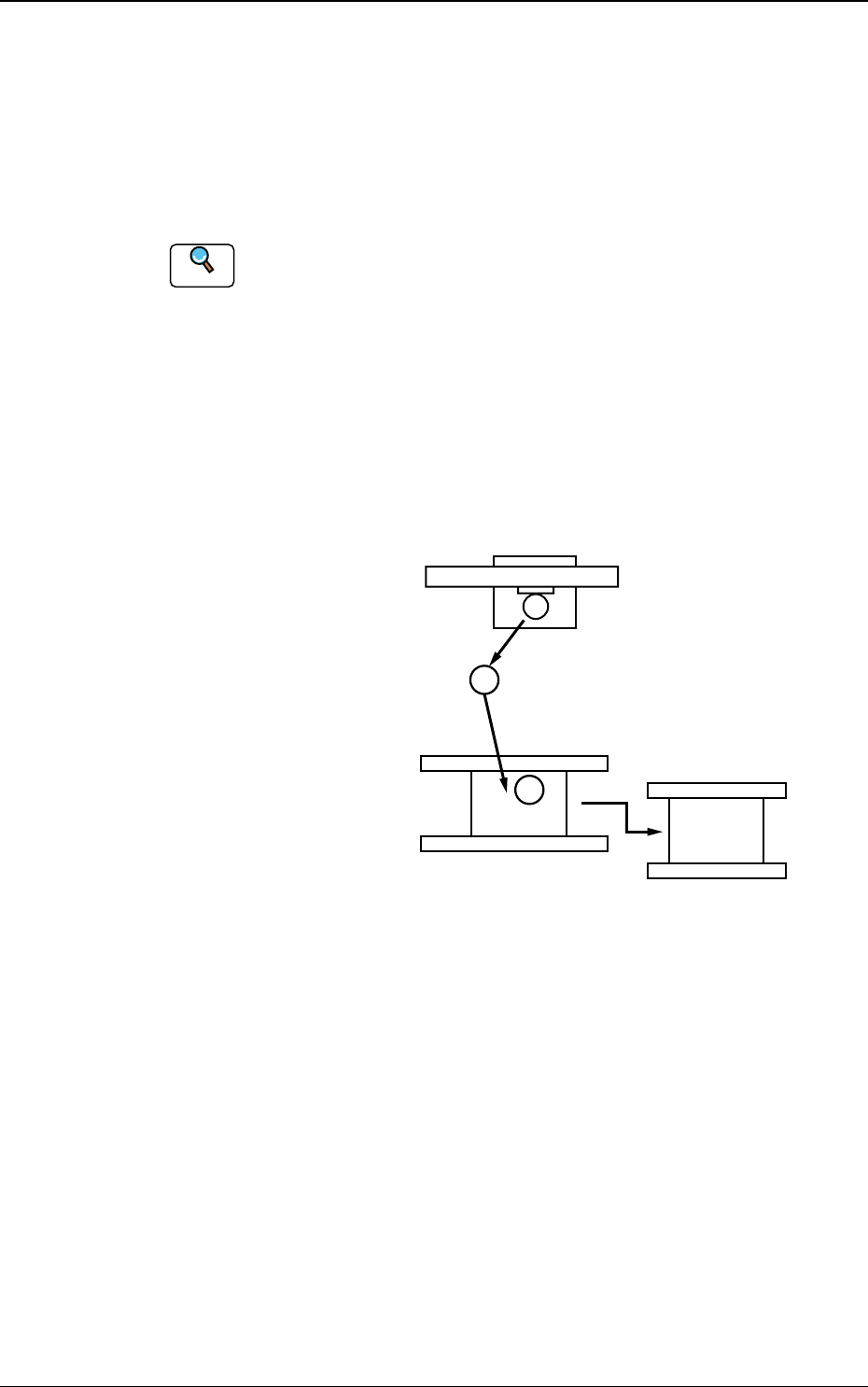
Prozess A : Bestückungskopf fährt zur Feeder-Basis und nimmt Bauteil auf.
Prozess B : Kopf fährt in den Bereich, in dem die Bauteilerkennungskamera
installiert ist und die Bauteilerkennung erfolgt
Prozess C : Der Bestückungswinkel wird korrigiert, während der Kopf zu
der Bestückungsposition auf der Leiterplatte verfährt.
Prozess D : Das Bauteil wird auf der Leiterplatte platziert
Prozess E : Die bestückte Leiterplatte wird entladen.
1
2
3
Feeder-Basiseinheit
Bauteil-Erkennungskamera
LP-Positionierung
Prozess A
Prozess B
Prozess C
Prozess
D
Prozess E
F4E1
Basierend auf dem Prozess können Fehler in die beiden folgenden Kategorien
eingeordnet werden.
Fehler vor der Bauteilplatzierung : Diese Art von Fehlern passieren in den
Prozess-Schritten A, B und C.
Fehler nach der Bauteilplatzierung : Diese Art von Fehlern passieren in den
Prozess-Schritten D und E.