TM3355.CheckNozzleBuffingFunctionSpecifications.pdf - 第22页
Y AMAHA M otor Co. Ltd ., IM Company SMT Software Engineering Grou p MDOC-SOFT50 052 22 /27 7.3. Output log After the n ozzle buff ing check is ex ecuted, t he executi on result is output to [ MIS]- [Error log]. The dete…

YAMAHA Motor Co. Ltd.,
IM Company
SMT Software Engineering Group
MDOC-SOFT50052
21/27
The height when grounding it by the grounding check by the vacuum is set.
The amount of the offset to Measurement height (mm) is set.
When the structure of a nozzle is changed, the suitable value suitable for the nozzle is set
up.
Load of harden check (N)
The load when press-in it by the load check by the servo buffing is set.
When the structure of a nozzle is changed, the suitable value suitable for the nozzle is set
up.
Buffing check approach stroke (mm)
The stroke that ascent before it press-in by the load check by the servo buffing is set.
The amount of the offset to Measurement height (mm) is set.
When the structure of a nozzle is changed, the suitable value suitable for the nozzle is set
up.
Buffing stroke (mm)
The amount press-in by the load check by the servo buffing is set.
The amount of press-in from buffing check approach stroke (mm) is set.
When the structure of a nozzle is changed, the suitable value suitable for the nozzle is set
up.
Sampling count
The number of samples when the current difference is calculated by the load check by the
value of the current of Z-axis motor is set.
Tolerance of the current difference
The permissible value of the current difference is set by the load check by the value of the
current of Z-axis motor.
When the structure of a nozzle is changed, the suitable value suitable for the nozzle is set
up.
Although accuracy goes up by increasing the number of samplings, the execution speed of
a check falls.
Vacuum check timer (msec)
The timer of the following vacuum waiting of vacuum ON is set.
If time is taken until a vacuum is stabilized, the abnormalities of a nozzle may be
incorrect-detected.
This setup is changed, when such a case occurs frequently, or when gathering the
execution speed of a check.
YAMAHA Motor Co. Ltd.,
IM Company
SMT Software Engineering Group
MDOC-SOFT50052
22/27
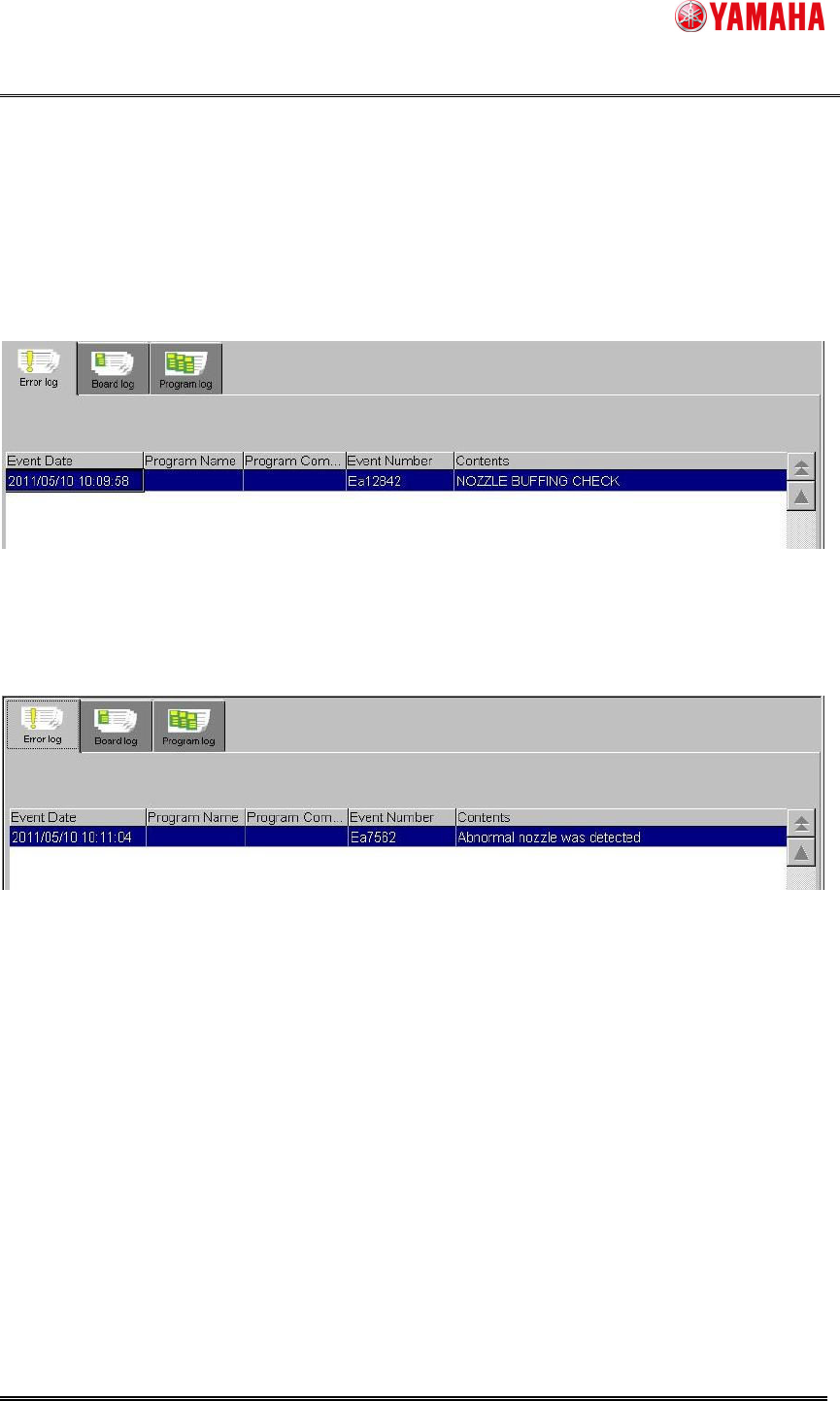
7.3. Output log
After the nozzle buffing check is executed, the execution result is output to [MIS]-[Error log].
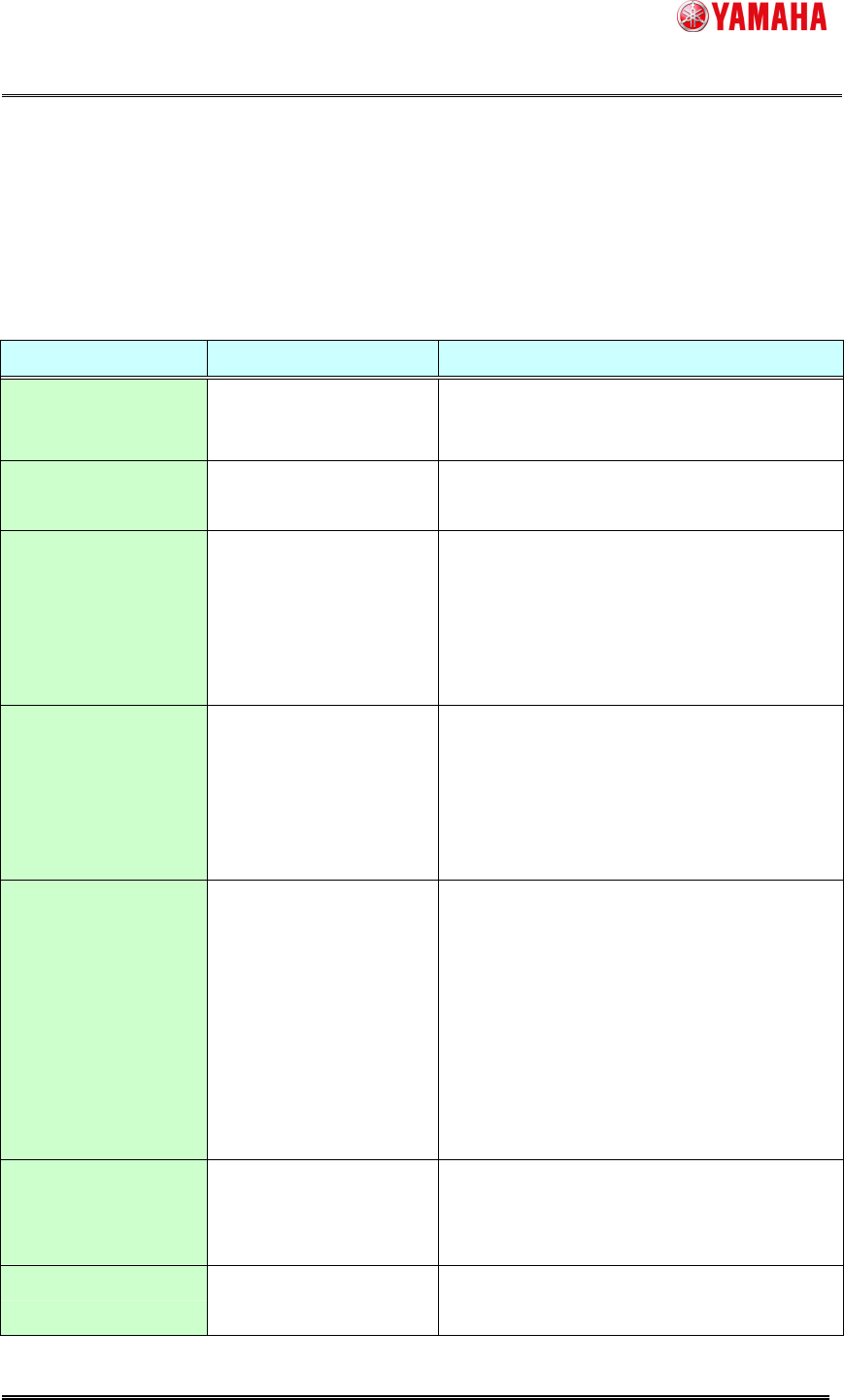
The detection result is output in case of normal or abnormal. (See Fig. 0.2)
Moreover, when the detection result is abnormality, the station numbers of the nozzle with the
error can be displayed up to ten.
Log output when normality finish.
Fig. 0.1 Error log screen normality finish
Log output when abnormality finish.
Fig. 0.2 Error log screen abnormality finish
YAMAHA Motor Co. Ltd.,
IM Company
SMT Software Engineering Group
MDOC-SOFT50052
23/27
7.4. Nozzle buffing check result log
Log file of the latest nozzle buffing check result is output to the following destination.
[D:¥Machine¥My History¥NozzleBuffingCheckResult.csv]
(*) System Backup acquires this file.
Format of log file
Item Contents Record value
Table
A table number Is
expressed.
In an order from 0, A table, B table, C table,
and D table are expressed.
Head
A
Head number is
expressed.
Each head number is expressed in an
order from 0.
Nozzle Type
A number denotes a
nozzle type.
A nozzle type is expressed in an order from
0.
It is display turn of [VmSpec] -
[Specification Information] - [M
ount Nozzle
Specification] - [Nozzle Data].
Target It is records whether it is
a candidate for
execution of nozzle
buffing check.
A decimal number records what carried out
bit expression of the head for execution.
For example, it is set to "21" when
performing a nozzle buffing check to 301
nozzles of No.1, No.3, and a No.5 head.
Result
A result
of nozzle buffing
check is expressed
numerically.
A decimal number records the logical sum
of the following values for a
nozzle buffing
check result.
0:
Correctly
1:It adherence, while it was extended.
2:It adheres a little or motion is astringent.
4:It adherence, while it was shrunk.
8:It not returned, when carrying out buffing
Buffing Target
Height
A target position
of
servo buffing is
recorded.
Z-axis is recorded.
Buffing Intol Height
A
stop position of servo
buffing is recorded.
Z-axis is recorded.