TM3355.CheckNozzleBuffingFunctionSpecifications.pdf - 第26页
Y AMAHA M otor Co. Ltd ., IM Company SMT Software Engineering Grou p MDOC-SOFT50 052 26 /27 (4) Load check ex ecute by s ervo b uffing. In execut e to j udge wheth er it a dheres w hile buff ing is extended, the load c h…
YAMAHA Motor Co. Ltd.,
IM Company
SMT Software Engineering Group
MDOC-SOFT50052
25/27
7.5. Motion of machine on the nozzle buffing check
7 working lines execute the nozzle buffing check.
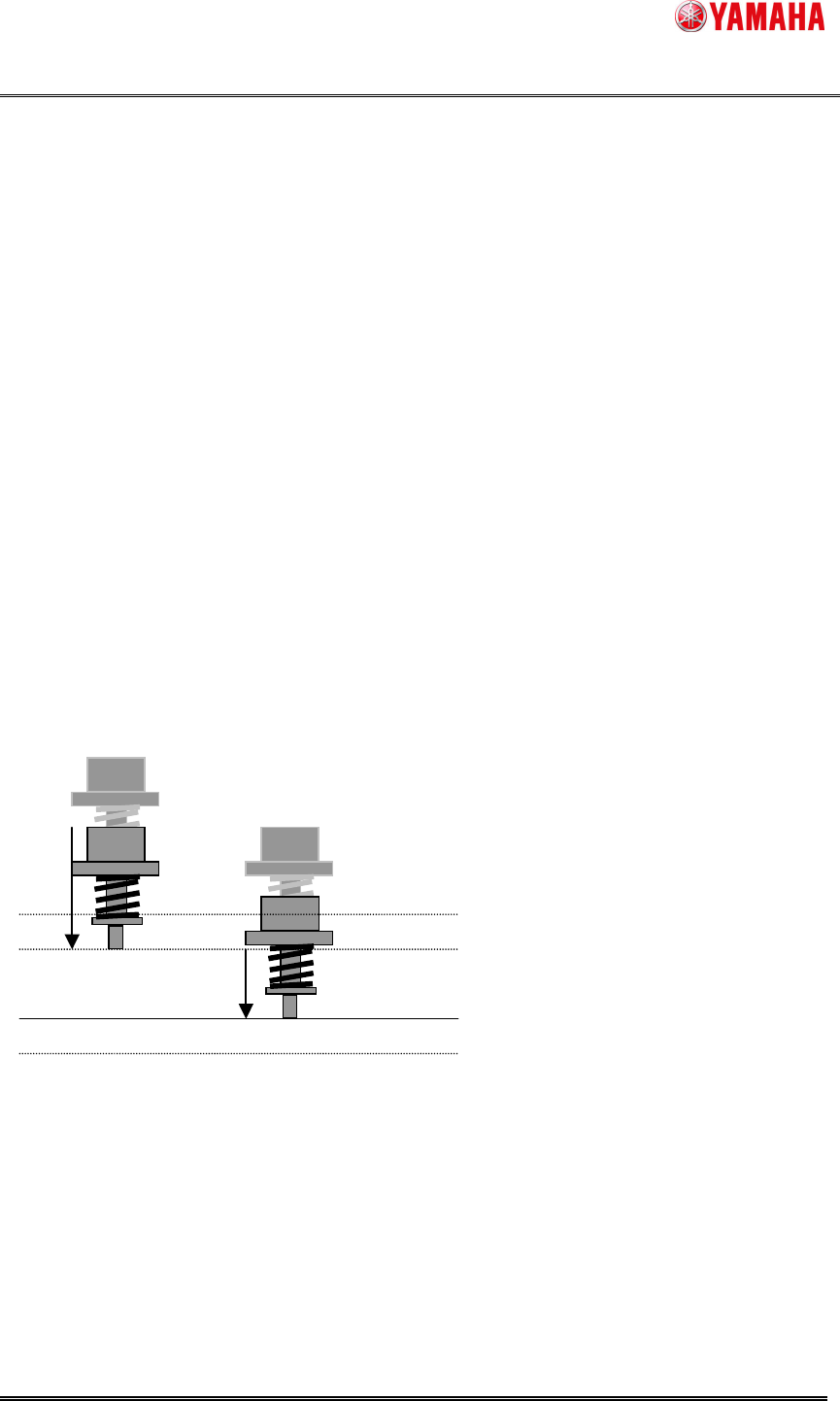
(1) Measurement of vacuum release
By comparing vacuum release level (2) with vacuum sealing level (6), it is judged whether
buffing adheres (7).
1. XY-axis moves to [Brow STN position X], [Brow STN position Y].
2. Z-axis moves of head to [Brow STN height (mm)] + [Height change speed (mm)] at
speed of 100%.
3. Vacuum ON of head waits by [Vacuum timer (msec)].
4. Measurement of vacuum release.
(2) Measurement of grounding vacuum level before a buffing.
The vacuum level for judging whether buffing adheres by (7) is measured.
1. Z-axis moves [Brow STN height (mm)] + [Grounding height (mm)] of head by speed
[Grounding down speed (%)] %.
2. Vacuum ON of head waits by [Vacuum timer (msec)].
3. Measurement of grounding vacuum level before a buffing.
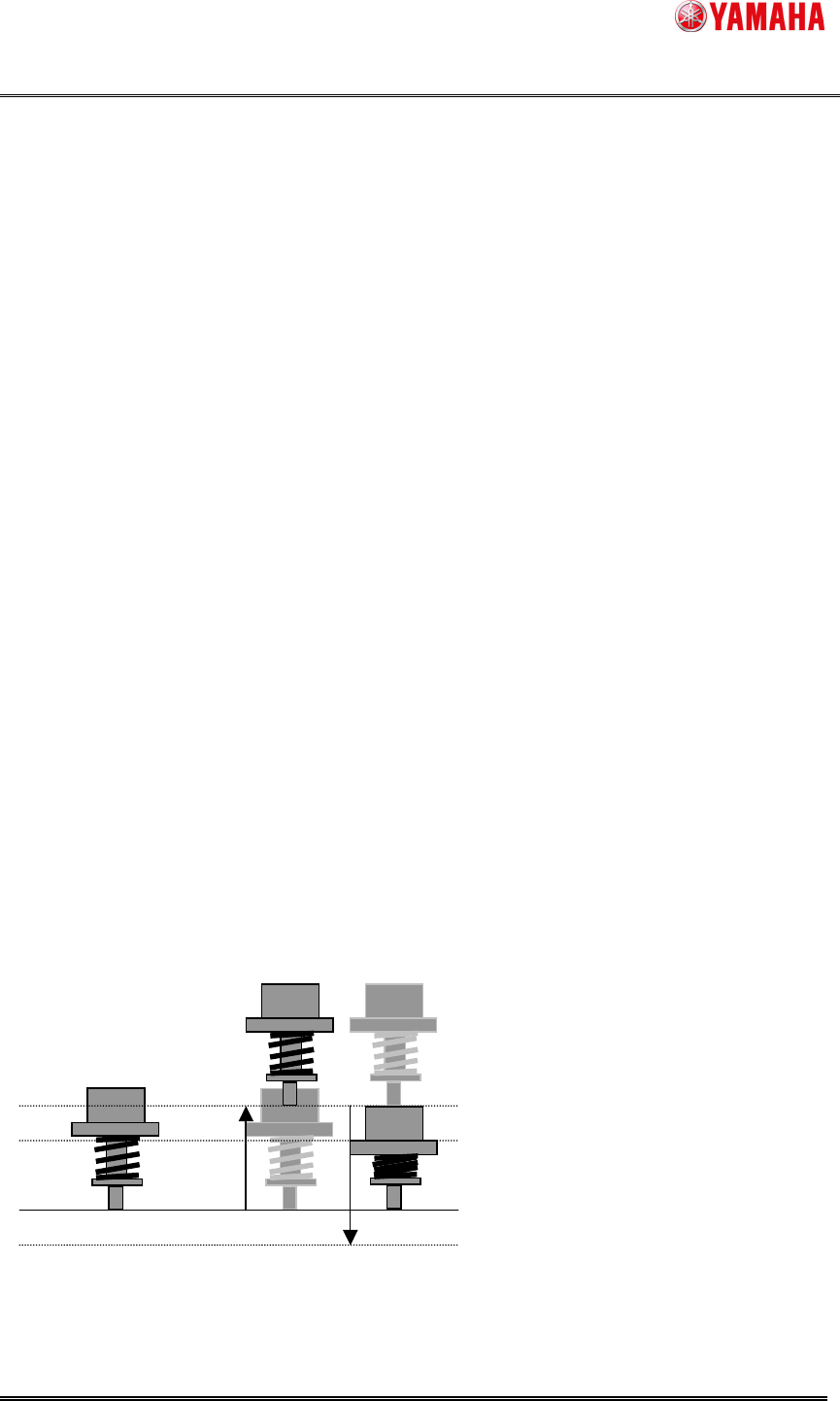
(3) Press-in by servo buffing.
The Z-axis is moved to the coordinates for performing a load check.
1. Z-axis moves [Brow STN Height (mm)] + [Buffing check approach stroke (mm)] of head
by speed 100%.
2. Servo buffing Z-axis moves [Load of harden check (N)] to [Measurement Height (mm)] +
[Buffing check approach stroke (mm)] + [Buffing stroke (mm)] head by speed [Slide
down speed (%)]
(2)
Measurementheight(mm)
Speedchangeheight(mm)
Buffingcheckapproachstroke(mm)
Buffingstroke(mm)
(1)
YAMAHA Motor Co. Ltd.,
IM Company
SMT Software Engineering Group
MDOC-SOFT50052
26/27
(4) Load check execute by servo buffing.
In execute to judge whether it adheres while buffing is extended, the load check by servo
buffing is performed.
1. Load check by servo buffing.
Load check by servo buffing is Target coordinates at the time of press-in by the servo
buffing are compared with coordinates after it moves.
If coordinates after it moves have not reached within the range of intersection of target
coordinates, it is judged, [High Level Buffing Error] (The nozzle has friction with the
buffing action, or the nozzle is clogged up.).
(5) Load check execute by current level of Z-axis motor.
Action of buffing is checked with the current value of a Z-axis motor.
1. Load check execute by current level of Z-axis motor.
Load check execute by current level of Z-axis motor is the current level at the time of
press-in by the servo buffing is measured at 8ms cycle.
And the current differences are compared at intervals of [Sampling count] for the
maximum value and minimum value.
When the difference between the maximum value and minimum value exceeds
[Tolerance of the current difference], it is judged [Low Level Buffing Error] (The nozzle
has slight friction with the buffing action.).
Moreover, it is possible not to check it by changing a set value of [Current level check] to
[Not Use] for this check either.
Measurementheight(mm)
Speedchangeheight(mm)
Buffingcheckapproachstroke(mm)
Buffingstroke(mm)
(3)(4)(5)
(2)
YAMAHA Motor Co. Ltd.,
IM Company
SMT Software Engineering Group
MDOC-SOFT50052
27/27
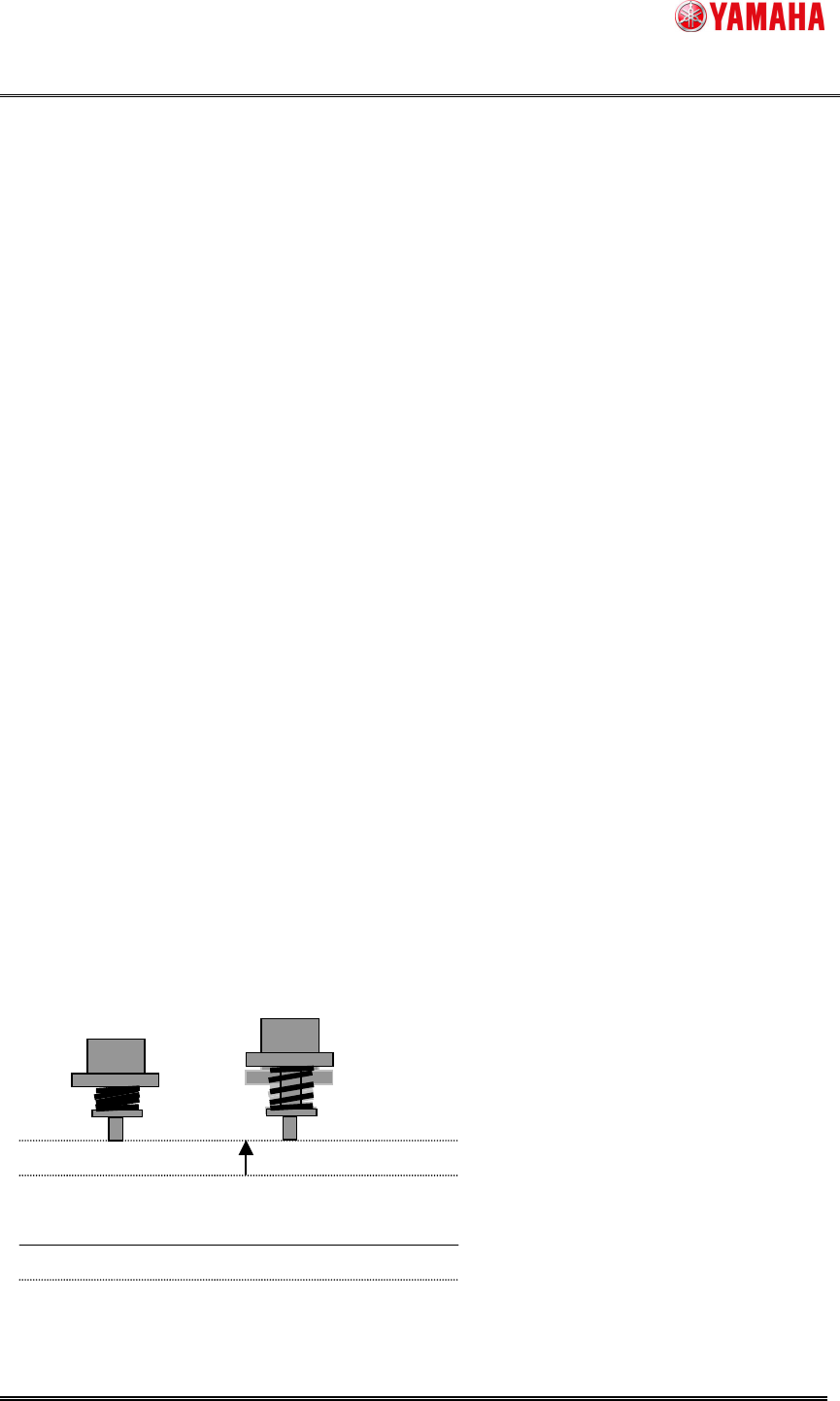
(6) Measurement of grounding vacuum level after a buffing.
The vacuum level for judging whether buffing adheres by (7) is measured.
1. Z-axis moves of head to [Measurement height (mm)] + [Grounding height (mm)] at
speed [Grounding down speed]%.
2. Vacuum ON of head waits by [Vacuum timer (msec)].
3. Measurement of grounding vacuum level after a buffing.
(7) Grounding check execute by vacuum.
By comparing vacuum release level (1) with vacuum sealing level (2, 6), it is judged whether
buffing adheres.
1. Grounding check by vacuum.
Grounding check by vacuum is the vacuum that has been being measured up to now is
compared.
If “vacuum release + 2 > Average (Grounding vacuum level before a buffing, Grounding
vacuum level after a buffing)” doesn't consist, it is judged [Middle Level Buffing Error]
(Clinging of the buffing, and the nozzle length have shortened.).
If “| Grounding vacuum level before a buffing - Grounding vacuum level after a buffing | >
Result of calculating formula of vacuum. (*1)” doesn't consist, it is judged [Middle Level
Buffing Error] (It doesn't return after the buffing is done, and nozzle is shorted.).
*1
Result of calculating formula of vacuum =
0.088 x (Mount vacuum level according to nozzle – Pick vacuum level according to
nozzle) + 3.4
(3)(4)(5)
(6
)(7)
Measurementheight(mm)
Speedchangeheight(mm)
Buffingcheckapproachstroke(mm)
Buffingstroke(mm)