OPE-NEXIM-007S0(2).pdf - 第173页
4. 元件数据的管理 OPE-NEXIM-007S0 156 Nexim 操作手册 4.3 外形的编辑 4.3.1 元件形状的设置步骤 Vision Type 的设定 用手动设置属性区的 Vision Ty pe 时,请从 Vision Type 设置对话框的元件影像中选择 Vision Type。 选择 Vision Type 0 时,可通过设置 「Vision Step 1」 与 「Vision St ep 2」 进行组合影像处理。…
OPE-NEXIM-007S0 4. 元件数据的管理
Nexim 操作手册
155
4.2.2 其他
完成确认
请保存或别名保存。
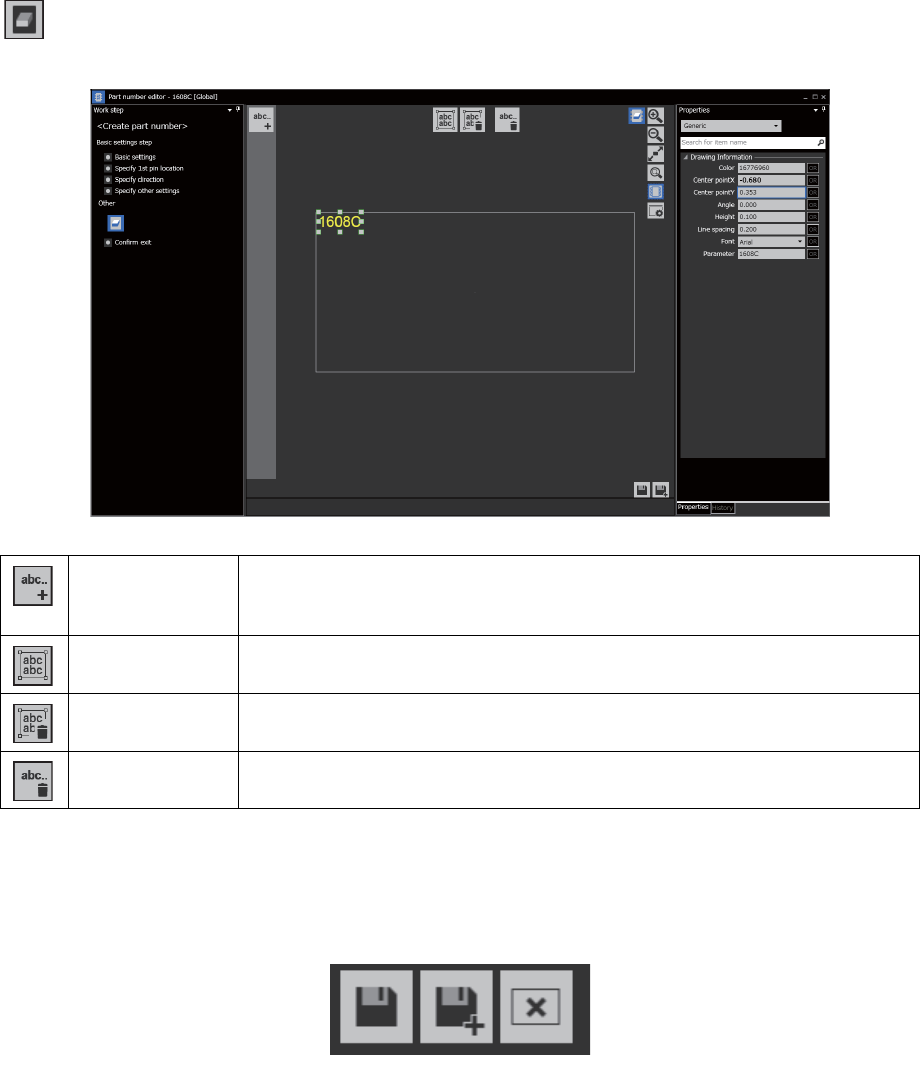
在元件形状图像中设定字符串的附加外形数据。单击 working 区域右侧的 [ 图像切换 ] 图标,单
击 [ 附加外形数据 ] 图标的话能追加、显示字符串。
Add text 追加文本。点击小图标并以拖拽方式配置文本。
追加完文本之后,请通过属性对文本、字体、颜色等进行设定。
Group 选择多个文本并对其进行组合。
Ungroup 对多个文本取消组合。
Delete text 删除文本。
41OPE-1550-E
41PRG-0079
4. 元件数据的管理 OPE-NEXIM-007S0
156 Nexim 操作手册
4.3 外形的编辑
4.3.1 元件形状的设置步骤
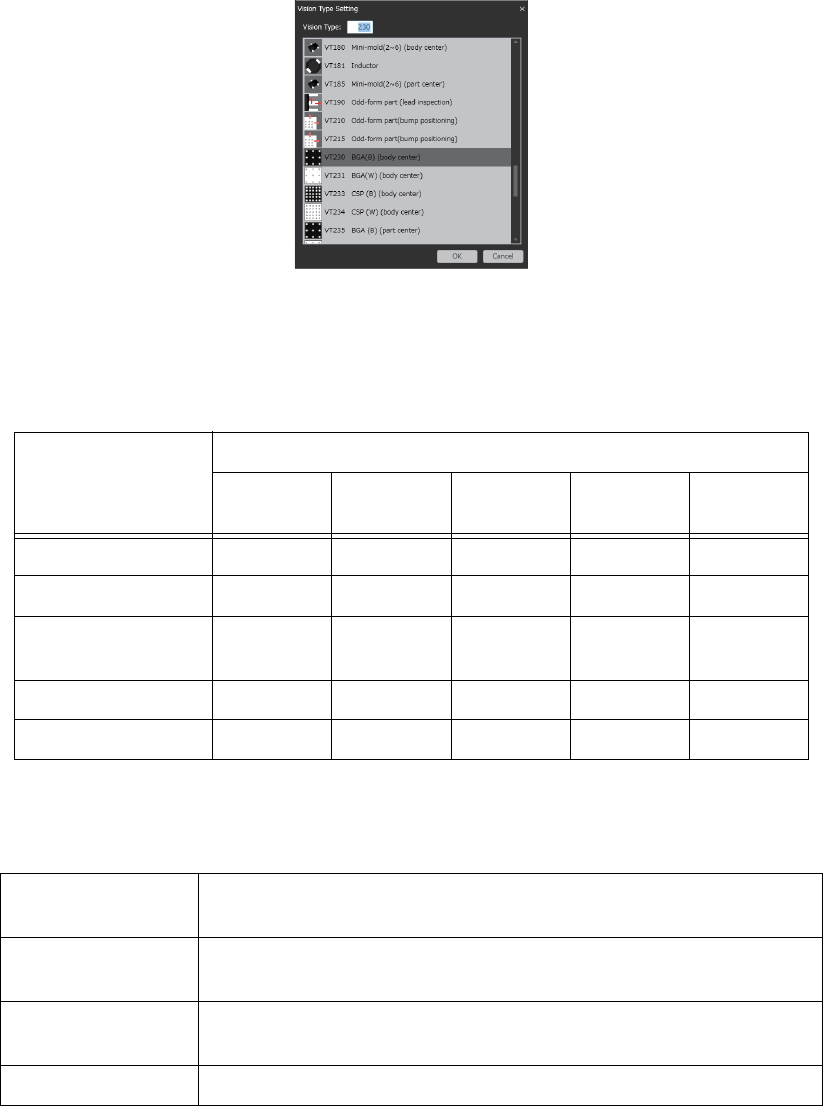
Vision Type 的设定
用手动设置属性区的 Vision Type 时,请从 Vision Type 设置对话框的元件影像中选择 Vision Type。
选择 Vision Type 0 时,可通过设置 「Vision Step 1」与 「Vision Step 2」进行组合影像处理。因为可通
过算法的组合进行影像处理,因此可处理之前无法进行定位的元件。Vision Type 0 的元件基准点为元件主
体的中心。
「Vision Step 1」是选择元件的大致定位方法。
以下是选项说明。
表 4-1 Vision Step 的组合
Vision Step 1 Vision Step 2
None Position
Lead
Inspect
Lead
Position
Bump
Inspect
Bump
Seekline ×○×○○
Lead Recognition × × × ○ ○
Bump
Recognition
×○○××
Body Outline ×○○○○
Image Matching ○ ○ ○ ○ ○
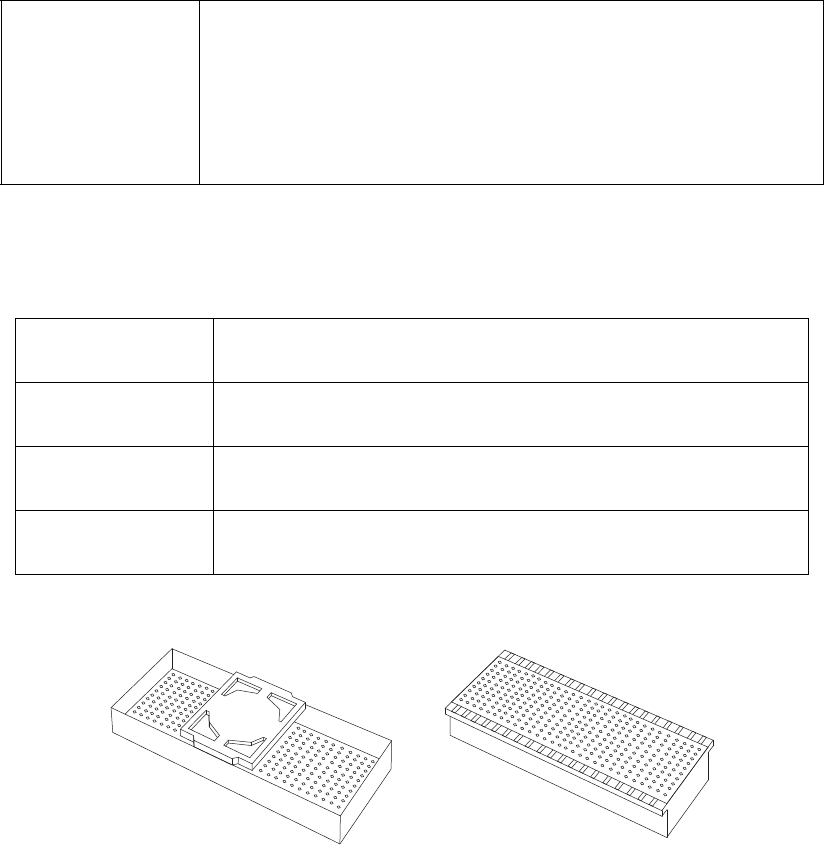
Seekline 利用查找线定位。处理方法与 Vision Type 18 相同,需要配置查找
线。
Lead Recognition 通过引脚的配置进行定位。用于黑色主体的引脚元件。需要引脚特
征数据。
Bump
Recognition
通过锡球的配置进行定位。用于黑色主体的锡球元件。处理方法与
Vision Type 142 相同。需要锡球特征数据。
Body Outline 通过元件的主体外形进行定位。处理方法与 Vision Type 252 相同。
41PRG-0682-E
OPE-NEXIM-007S0 4. 元件数据的管理
Nexim 操作手册
157
「Vision Step 2」用于选择元件的精密定位方法。不能只选择 「Vision Step 2」。「Vision Step 2」必须
与 「Vision Step 1」搭配使用。
以下是选项说明。
• 影像举例
Image Matching 只有在读取使用 AIMEXIII(c) V4.50 或更高版本的标准相机获取的影
像时才显示该项。通过对比影像进行定位。选择 Image Matching
时,在 PartEditor 内完成主体数据调整、形状数据编辑后点击 [ 样
板影像的更新 ] 按键后,需要更新样板影像。因为要进行影像的对
比,所以亮度变化微弱 ( 纯白、纯黑 ) 的影像在 [ 样板影像的更新 ]
时发生报错。除此之外,不足 5mm×5mm 的元件也发生报错。可
对应标准相机。
Position Lead 通过引脚特征数据进行精密定位处理。最终的定位结果是
「Vision Step 2」的结果。需要引脚特征数据。
Inspect Lead 通过引脚特征数据进行检查处理。最终的定位结果是 「Vision
Step 1」的结果。需要引脚特征数据。
Position Bump 通过锡球特征数据进行精密定位处理。最终的定位结果是
「Vision Step 2」的结果。需要锡球特征数据。
Inspect Bump 通过锡球特征数据进行检查处理。最终的定位结果是 「Vision
Step 1」的结果。需要锡球特征数据。
30PRG-0390