JAKA Zu se使用手册 - 英文版.pdf - 第10页
10 JAK A Zu Se sensor, it is suggested that after running for a period of time, the robot shall choose [ Initialize] t o make compensation for the sensor if there is no ext ernal force contact at the end of t he robot. F…
JAKA Zu Se 9
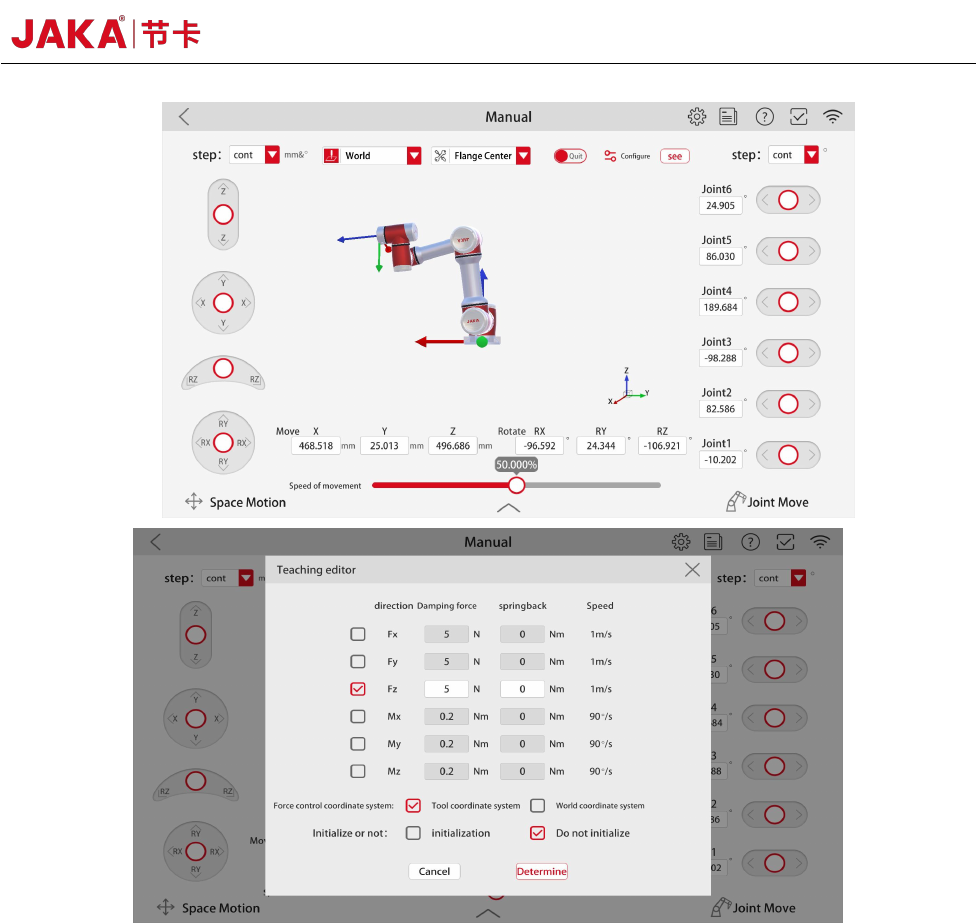
Figure 5. Settings of JAKA Zu Se Traction Teaching Function
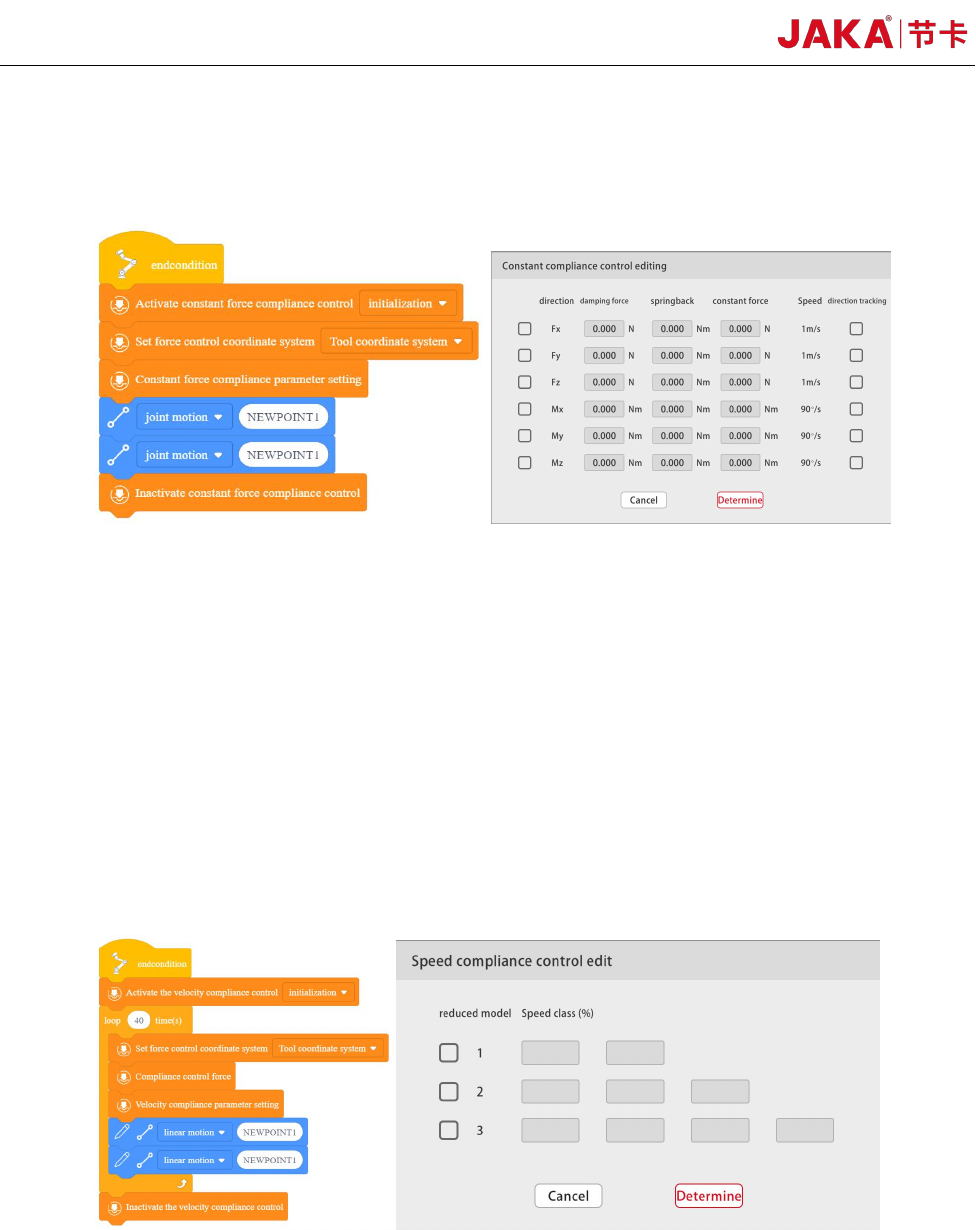
d. Constant force model
Constant force mode ensures that the contact force between the robot end and the external
environment is within the range of the set constant force value. As shown in Figure 5, the constant
force mode includes [Open the Constant Force Compliance Control], [Setting the Force Control
Coordinate System], Setting the Constant Force Compliance Parameter] and [Close the Constant
Force Compliance Control]. On the interface of [Constant force compliance parameter setting], the
configuration parameters are consistent with the traction teaching parameters. Users can set the value
of [Constant Force] according to the desired contact force value. The size of [Damping Force] needs
to match the external environmental stiffness. Generally speaking, the greater the environmental
stiffness is, the greater the value of [Damping Force] is required. Due to the temperature drift of the
10 JAKA Zu Se
sensor, it is suggested that after running for a period of time, the robot shall choose [Initialize] to
make compensation for the sensor if there is no external force contact at the end of the robot.
Figure 6. JAKA Zu Se Constant Force Mode Programming
e. Speed Mode:
In the speed mode, when the force at the robot side is greater than the set value of control force,
the robot will decelerate until the sensor detection value is less than the set value of control force. As
shown in Figure 6, the speed mode includes [Open Speed Compliance Control], [Speed Compliance
Parameter Setting], [Compliance Control] and [Close Speed Compliance Control]. In the interface of
[Speed Compliance Parameter Setting], configure the speed ladder, and select the size of control
force in the interface of [Speed Compliance Control Force].
JAKA Zu Se 11
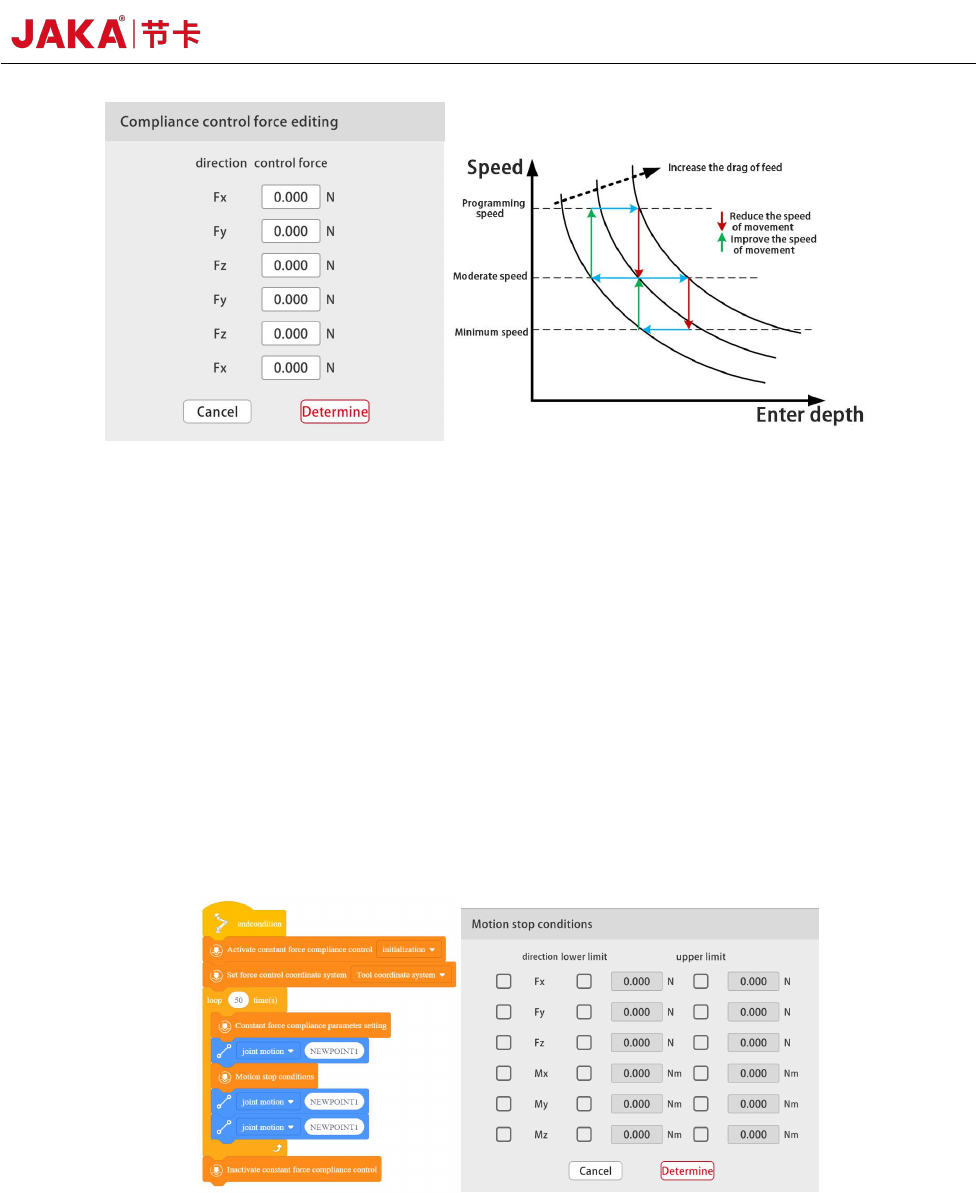
Figure 7. JAKA Zu se speed mode programming
f. Motion Termination Condition
On the Motion Termination Condition Setting interface, select the direction to be monitored and
set the upper limit or lower limit; When the contact force value is less than the lower limit value or
greater than the upper limit value, the motion termination condition will be triggered. [Motion
Termination Condition] Monitor the next motion instruction next to each other. If the motion
termination condition is triggered, the robot will immediately move from its current position to the
end of the next motion directed. It is important to note that all parameters shall be set to 0 in
[Constant Force Compliance Parameter Setting] without any direction being selected.
Figure 8. JAKA Zu Se Motion Termination Programming
G. Real-time display of external forces
Select [View] on the manual interface to display the contact external force value in real time. It is
important to note that in manual mode, it is required to display the contact force value in force
control [Free-drive] mode.