JAKA Zu se使用手册 - 英文版.pdf - 第13页
JAKA Zu Se 13 Chapter 5 JAKA Zu Se Precautions for Use a. The integrated force sensor is a precision instrument. Please be sure to use the product within the s pecification range specified in the manual. In particular, t…
12 JAKA Zu Se
Figure 9. Force Display Interface of the APP

JAKA Zu Se 13
Chapter 5 JAKA Zu Se Precautions for Use
a. The integrated force sensor is a precision instrument. Please be sure to use the product within
the specification range specified in the manual. In particular, the working condition with the load
greater than the rated load may cause a product failure. Please ensure that all directions of the force
sensor are within the load range;
b. Ensure that the load setting in the robot sensor side is accurate;
c. Ensure that the X+ direction of the sensor is consistent with the X+ direction of the robot
flange; Or set the tool coordinate system to ensure the same direction;
d. Before entering force control, there shall be no contact force between the robot side and the
external environment.
14 JAKA Zu Se
Chapter 6 Appendix
6.1 Description of sensor I
1.1 Overview
This strain type six-axis force/torque sensor can detect three forces and three torques
simultaneously. The sensor detects the relative deformation between the "Tool Side Flange" and the
"Body" caused by the applied force, and uses a resistance strain gauge to measure changes in the
sensor's elastic unit. The sensor contains an embedded system, which can collect and process the
signal changes of the resistance strain gauge in real time, and output the magnitude and direction of
the applied force in real time, with high precision and high response capability. When using the
sensor, please install it correctly avoid interference with the output result.
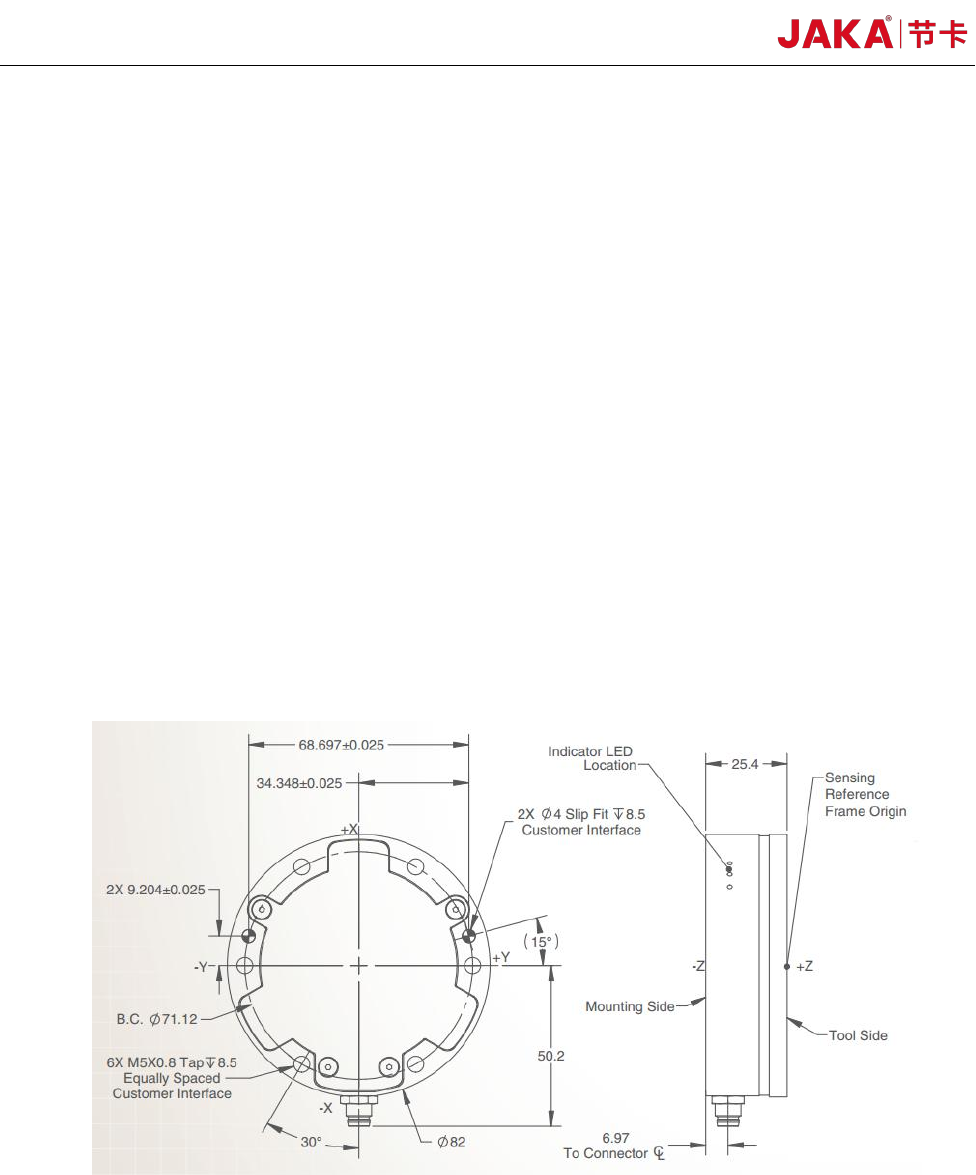
1.2 Sensor Installation
The sensor mounting hole position and mounting dimensions are as follows.