JAKA Zu se使用手册 - 英文版.pdf - 第3页
JAKA Zu Se 3 CONTENT CHAPTER 1 INSTRUCTI ON ..................... ..................... .................... ..................... ..................... ..................... ....... 4 1.1 B ACKGROUN D ..................…

2 JAKA Zu Se
Z u s e M a n u a l
JAKA Zu se
Ve r s i o n n u m b e r :

JAKA Zu Se 3
CONTENT
CHAPTER 1 INSTRUCTION
....................................................................................................................................
4
1.1 BACKGROUND
.......................................................................................................................................................
4
1.2 PURPOSE
................................................................................................................................................................
4
CHAPTER 2 PRODUCT DESCRIPTION
.................................................................................................................
5
CHAPTER 3 JAKA ZU SE SYSTEM CONSTRUCTION
........................................................................................
6
CHAPTER 4 USE OF JAKA ZU SE
...........................................................................................................................
7
CHAPTER 5 JAKA ZU SE PRECAUTIONS FOR USE
........................................................................................
13
CHAPTER 6 APPENDIX
...........................................................................................................................................
14
6.1 DESCRIPTION OF SENSOR I
..................................................................................................................................
14
6.2 DESCRIPTION OF SENSOR II
...............................................................................................................................
17
6.2 DESCRIPTION OF SENSOR III
.............................................................................................................................
25
4 JAKA Zu Se
Chapter 1 Instruction
1.1 Background
As labor costs continue to increase, 3C, medicine, food, logistics and other industries have
begun to seek robot automation solutions. These emerging industries are characterized by a wide
variety of products, rapid update and iteration, and high flexible requirements for operators. In order
to realize robots working side by side with humans, it is necessary to improve the perception ability
of the robot body, so the sense of robot manpower arises at the right moment.
1.2 Purpose
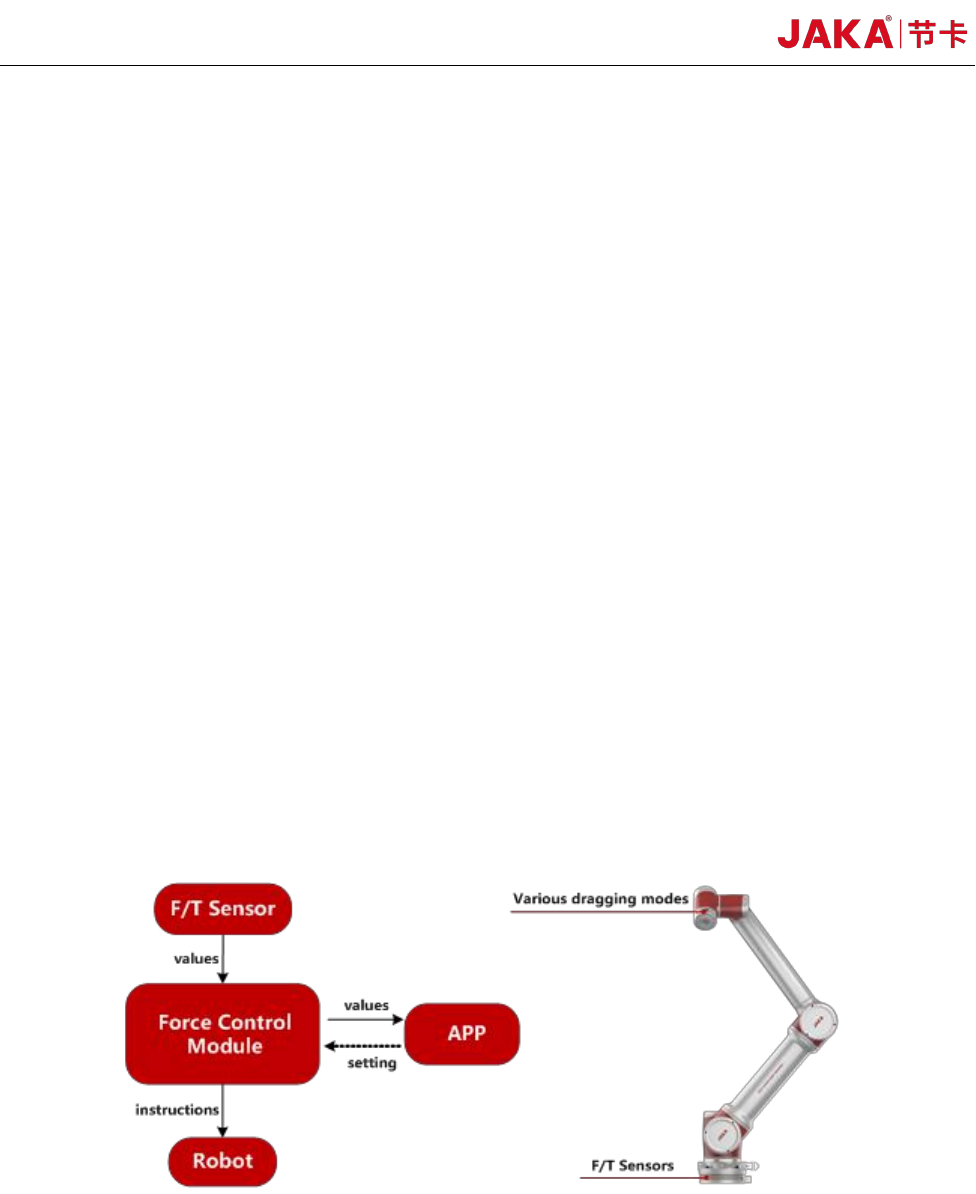
This product aims to adopt industry-level force sense sensor and integrate force control
algorithm with independent intellectual property rights, improve the perception ability of
collaborative robot ontology, and provide better human-computer interaction experience for
customers. As shown in Figure 1, the force sense
sensor
is installed on the robot side flange and the
force value is transmitted to the controller in real time. When the robot side actuator receives external
force, the posture of the end can be adjusted to adapt to the external force value. At the same time,
the customer can drag the position and posture of the robot from the robot side more smoothly.
Figure 1 JAKA Zu Se Functional Diagram