JAKA Zu se使用手册 - 英文版.pdf - 第16页
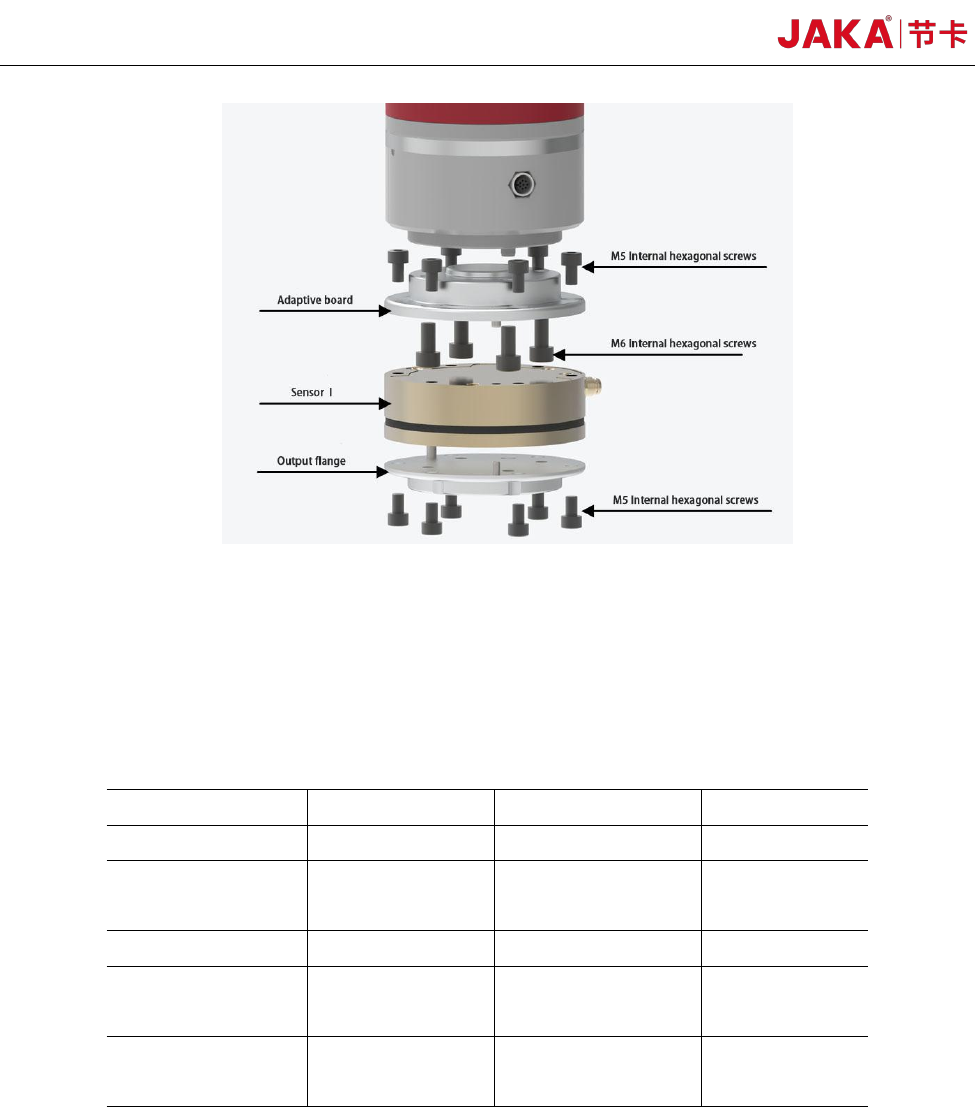
16 JAK A Zu Se Schematic Diagram of Conn ection and Installation of the Sens or and Equipment d. C onnect t he out put flange to the output side of t he sensor. The mechanical i nterface of t he output flange shall be th…
JAKA Zu Se 15
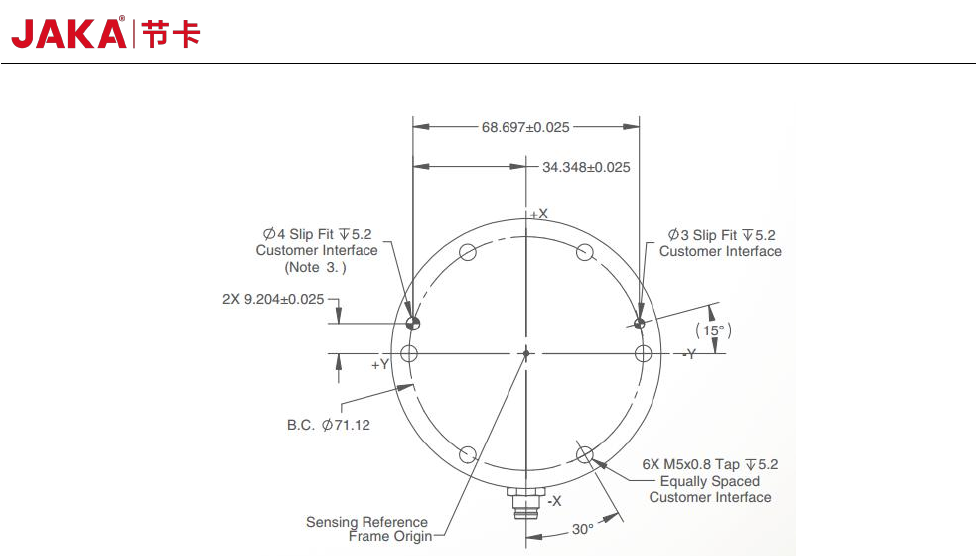
Sensor Size
a. Before installation, please check that there is no damage or foreign matter on the surface of
installation equipment, adaptor plate and sensor. If the contact is not uniform due to foreign matters
and other factors, a gap will be formed between the equipment (or adaptor board) to be installed,
which cannot guarantee the IP64 performance of the product and will impact the output effect of the
actual sensor.
b. Separate the sensor from the adaptor plate and install the adaptor plate on the robot side
flange. It is important to note that before the installation of the sensor, the X and Y directions of the
sensor coordinate system shall be guaranteed to be consistent with the X and Y directions of the
robot side flange coordinate system through pre-installation, that is, the TIO direction of the robot
side flange center shall be consistent with the -Y direction of the sensor. If the installation direction
is inconsistent, it will affect the subsequent use.
c. Tighten the connection between the sensor and the adaptor plate. 6 M5 hexangular set bolts
shall be gradually tightened diagonally to make uniform contact between the sensor and the adapter
plate.
16 JAKA Zu Se
Schematic Diagram of Connection and Installation of the Sensor and Equipment
d. Connect the output flange to the output side of the sensor. The mechanical interface of the
output flange shall be the same as that of the robot side flange.
1.3 Basic Sensor Parameters
Fx/Fy(N)
200
Fz(N)
360
Mx/My(Nm)
8
Mz(Nm)
8
Overload level
(%)
500
Accuracy (%)
0.5
Precision (%)
0.1
Protective class
IP64
Operating
temperature (°C)
5~80
Power supply
voltage (V)
12~24
Communication
Interface
Ethernet
System
Resolution (Bit)
16
Precision: Precision is the evaluation index symbolizing the extent of consistency between
multiple measured values, that is, the output curve consistency degree obtained by the sensor when
the input is tested for multiple times in a unified direction. The precision of reproducibility is the
percentage of the standard deviation of the output error to the rated output (%FS).
Accuracy: Accuracy is the evaluation index of the deviation degree between the measured value
and the true value. Accuracy refers to the percentage of the standard deviation of the deviation
between the output and the theoretical truth value and the rated output (%FS).
JAKA Zu Se 17
1.4 Precautions for use
Do not use in an environment with temperature and humidity outside the allowed range of
specifications.
The wiring must be completely correct. When the power is turned on, please check whether the
color of the connection cable is correct in accordance with the manual. If an error occurs at the
connection terminal, the internal circuit of the sensor may be short cut and possibly be damaged.
Please be sure to check.
The sensor has an embedded system and other precision parts. our company has carried out
relevant vibration and impact tests, but please pay attention to the product drop, excessive vibration
will lead to malfunction.
Do not knock when installing the sensor. Especially when it is matched with the adaptor plate, if
the clearance fit is tight due to the adaptor plate processing and other factors, do not knock the sensor,
otherwise it will cause damage to the sensor performance.
After the sensor is installed and powered on, it is recommended to preheat it for an hour before
operation.
In the actual use of the sensor, the quality of the mounted equipment shall be taken into
consideration to avoid overloading.
If there is any doubt or failure during use, please do not try operate without permission and
directly contact our Company.
2. Reference value of tightening torque of sensor mounting bolt
Metric
Reference tightening
torques (Nm)
M2
0.4
M3
2.0
M4
4.0
M5
8.0
M6
13.0
M8
35.0
6.2
Description of Sensor II
1.1 Overview
This strain type six-axis force/torque sensor can detect three forces and three torques