JAKA Zu se使用手册 - 英文版.pdf - 第9页
JAKA Zu Se 9 Figure 5. Sett ings of JAKA Zu Se Traction Teaching Function d. C onstant force m odel Constant force mode ensures that the contact force between the robot end and the ex ternal environment i s within the ra…

8 JAKA Zu Se
c. Traction teaching function
As shown in Figure 3, after selecting the sensor type and setting IP, port number, filtering and
load, etc., the controller starts to receive data from the sensor after pressing [OK] and [Run].
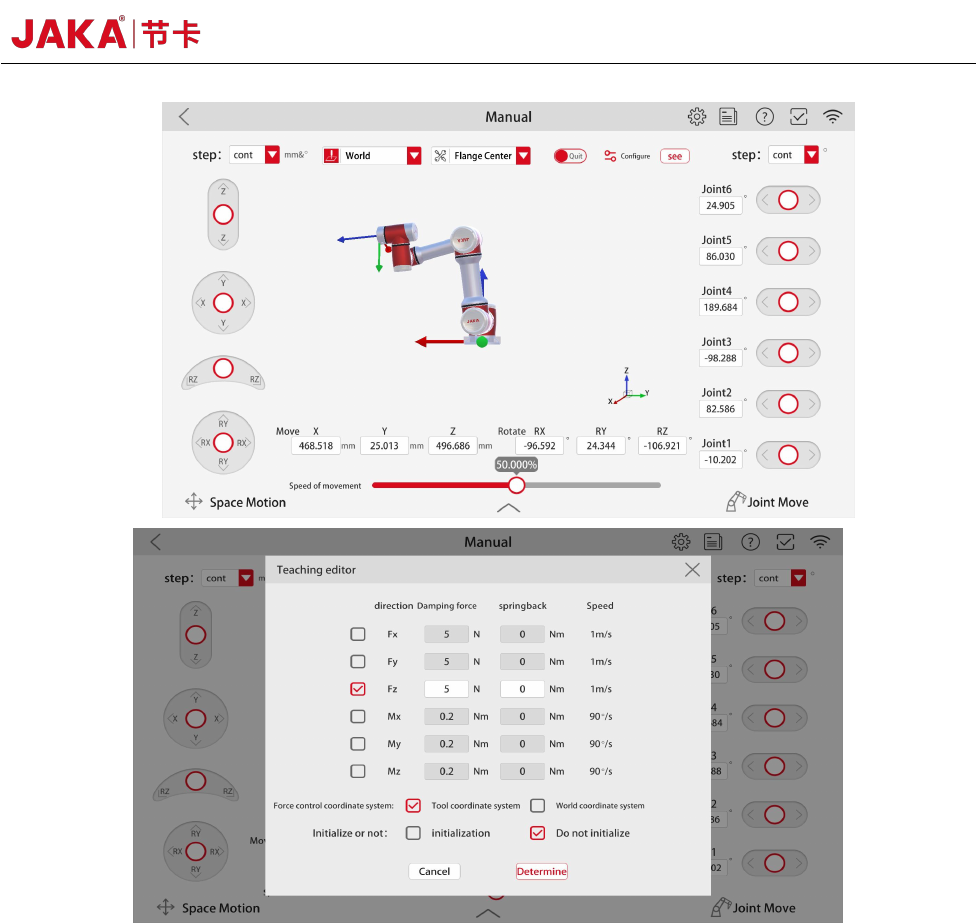
As shown in Figure 4, enter [Manual operation]. First, enter [Configuration] interface, where Fx,
Fy and Fz correspond to displacement in X, Y and Z directions, and Mx, My and Mz correspond to
rotation in X, Y and Z directions. By checking the □ in front of [Direction] to enable a certain
direction or several directions, that is, after the drag and drop is opened, the robot can be dragged in
the enabling direction. The smaller the setting of [Damping force] is, the smaller the drag force is
required by the user. However, the smaller setting of [Damping force] is not the better. It is
suggested that F is greater than 10N and M is greater than 0.2nm, and the setting value shall not be 0.
[Rebound] enables the robot to return to the original position before dragging. The larger the setting
value is, the greater the force is required to drag the robot;
Tick "Tool Coordinate System" to drag the robot in the set tool coordinate system. Tick [World
Coordinate System], then drag the robot in the base coordinate system;
Initialize or not. After the controller runs, it enters the drag mode for the first time. tick
[Initialize] to compensate the sensor bias and load, and ensure that there is no external force contact
at the end of the robot during the drag, otherwise the compensation accuracy will be affected.
After the parameters are configured, click [OK] and then click [Exit] to enter the [Drag] mode.
Before entering the drag mode, the robot end shall not be subjected to external force, otherwise it
will cause compensation error of the sensor and cause danger.
Due to the temperature drift and other reasons of the sensor, if the robot's position drifts in the
drag mode, please [Exit] and enter [Drag] to make sensor compensation again. Do not use traction
teaching function, please [Exit] in time.
JAKA Zu Se 9
Figure 5. Settings of JAKA Zu Se Traction Teaching Function
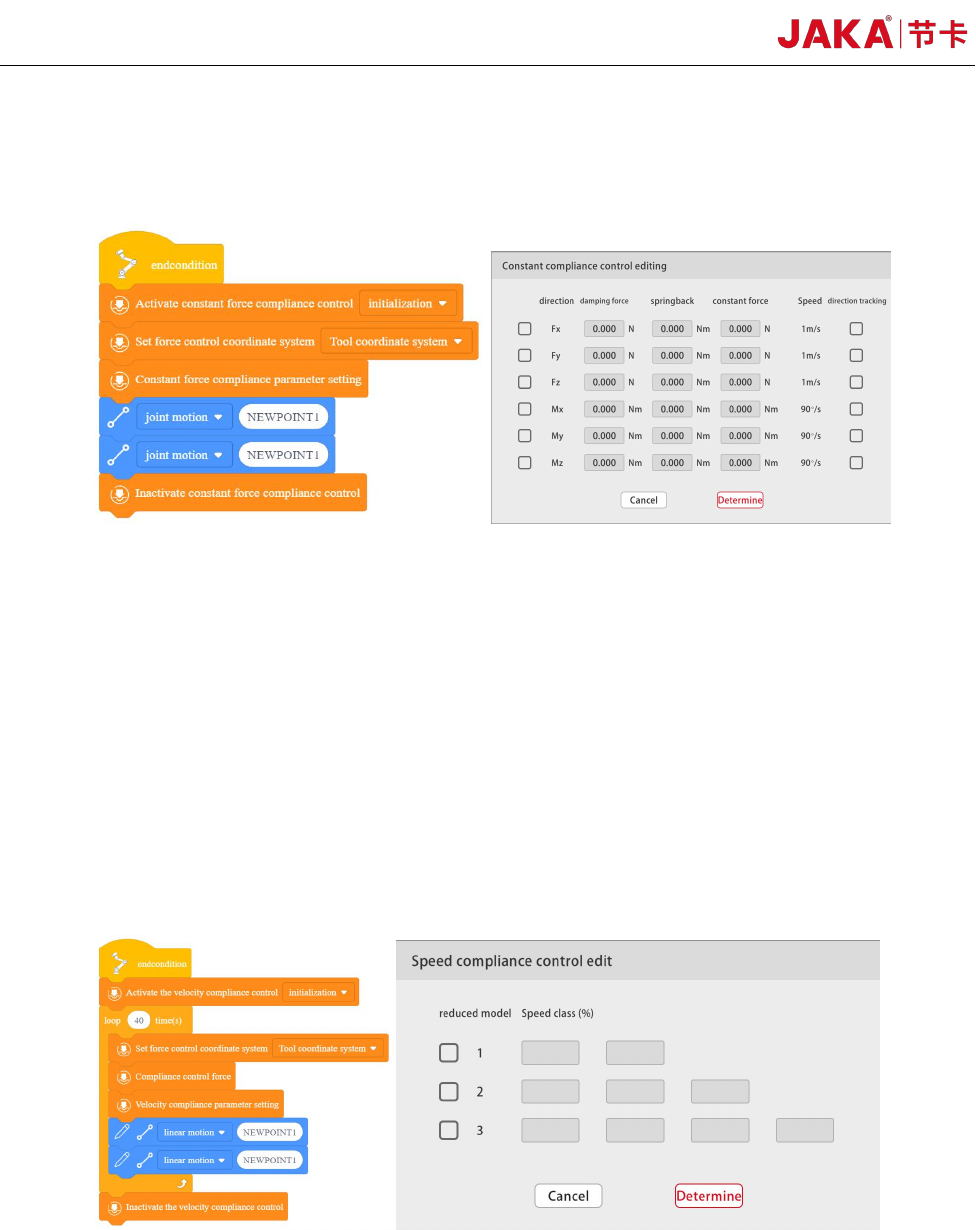
d. Constant force model
Constant force mode ensures that the contact force between the robot end and the external
environment is within the range of the set constant force value. As shown in Figure 5, the constant
force mode includes [Open the Constant Force Compliance Control], [Setting the Force Control
Coordinate System], Setting the Constant Force Compliance Parameter] and [Close the Constant
Force Compliance Control]. On the interface of [Constant force compliance parameter setting], the
configuration parameters are consistent with the traction teaching parameters. Users can set the value
of [Constant Force] according to the desired contact force value. The size of [Damping Force] needs
to match the external environmental stiffness. Generally speaking, the greater the environmental
stiffness is, the greater the value of [Damping Force] is required. Due to the temperature drift of the
10 JAKA Zu Se
sensor, it is suggested that after running for a period of time, the robot shall choose [Initialize] to
make compensation for the sensor if there is no external force contact at the end of the robot.
Figure 6. JAKA Zu Se Constant Force Mode Programming
e. Speed Mode:
In the speed mode, when the force at the robot side is greater than the set value of control force,
the robot will decelerate until the sensor detection value is less than the set value of control force. As
shown in Figure 6, the speed mode includes [Open Speed Compliance Control], [Speed Compliance
Parameter Setting], [Compliance Control] and [Close Speed Compliance Control]. In the interface of
[Speed Compliance Parameter Setting], configure the speed ladder, and select the size of control
force in the interface of [Speed Compliance Control Force].