JAKA Zu se使用手册 - 英文版.pdf - 第25页
JAKA Zu Se 25 6.2 Description of Sensor III 1.1 Overview This strain type six-ax is force/torque sensor can detect three forces and three torques simultaneously. Six-axial l oad sensors are generally divided into fixed s…

24 JAKA Zu Se
If there is any doubt or failure during use, please do not try to operate without permission and directly
contacting our Company.
JAKA Zu Se 25
6.2 Description of Sensor III
1.1 Overview
This strain type six-axis force/torque sensor can detect three forces and three torques
simultaneously. Six-axial load sensors are generally divided into fixed side (robot side) and loading
side (tool side). When the two sides of the sensor are under relative force, elastic deformation occurs
and the resistance of the strain gauge inside the sensor changes, which is then converted into voltage
signal output.
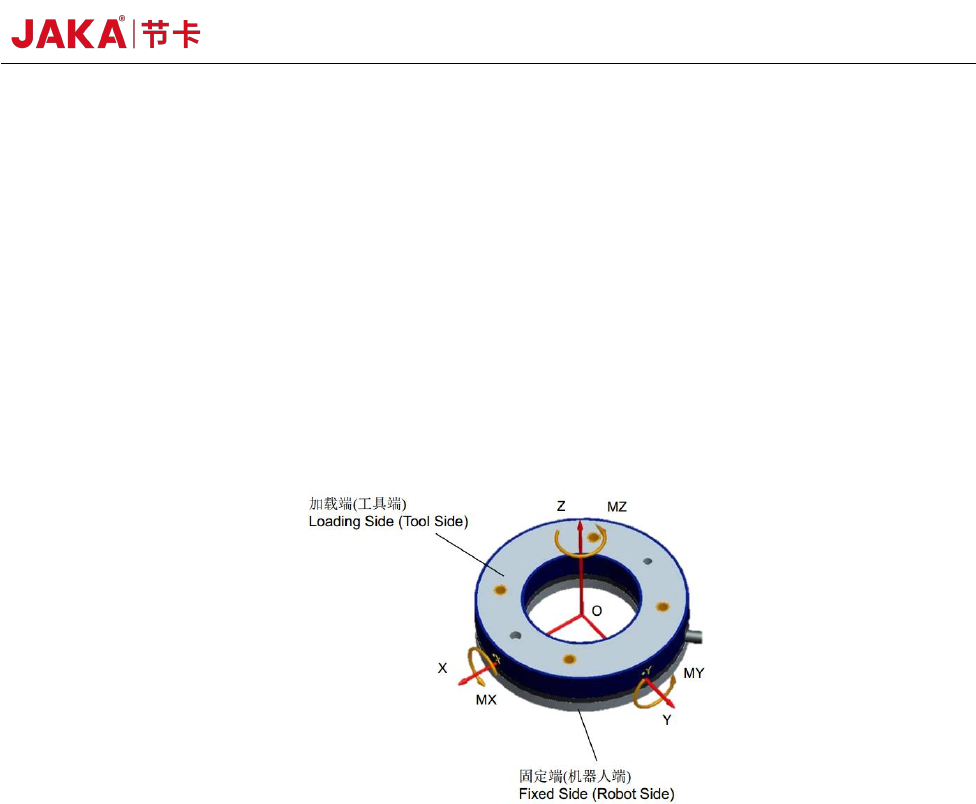
The output force and torque of the six-axis force sensor are relative to the neutral coordinate
system, which is generally located in the geometric center of the sensor.
Definition of the Sensor Coordinate System
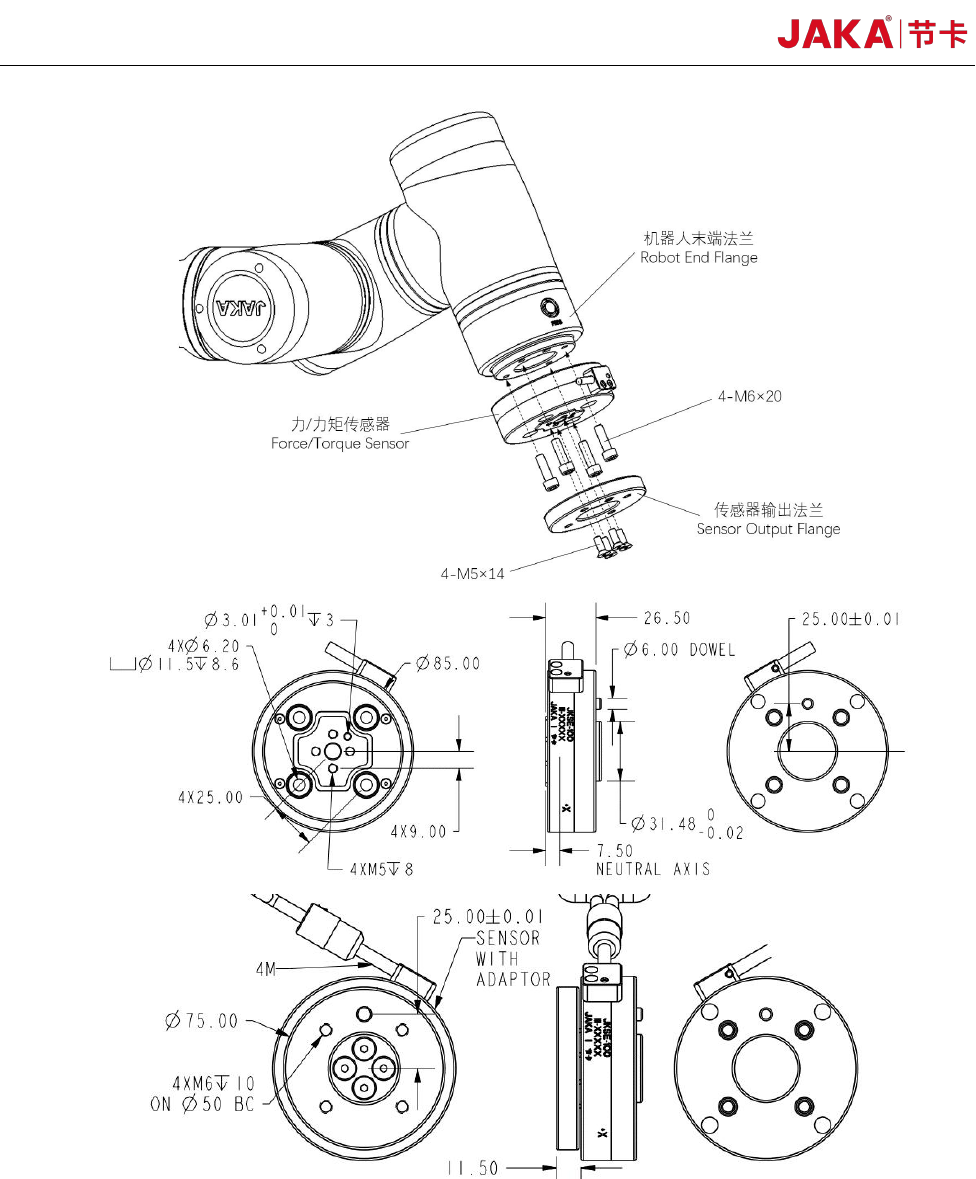
1.2 Sensor Installation
The sensor size, location of the fixed side (robot side) and the loading side (tool side) are
installed as shown in the figure below. The wire or joint is fixed at the fixed side to prevent the swing
or pull of the wire from affecting the measurement of the force sensor. The fixed side must be fixed
and external force is loaded from the loading side.
26 JAKA Zu Se
Sensor Installation
To tighten the screws, please tighten them gradually in the diagonal sequence. to make uniform
contact between the sensor and the equipment to be installed or the transfer fixture.
a. Before installation, please check that there is no damage or foreign matter on the surface of
the installation device and sensor. If the contact is not uniform due to foreign matters and other