JAKA Zu 12及JAKA Zu 12 pro -电控柜V2.1-硬件手册(中文版).pdf - 第14页
JAKA Zu 12 v 1.0 9 警告 : 1 .强制手动移动机 器人手臂仅限于 紧急情况,并 且有可能会损坏关节 ,不可作为 日常操作。 2 .如果手动释放了 制动器,机器人 可能会在重力 作用下发生运动,因 此在手动释 放制动器前务必 对机器人 本体及安装在机器人上 的工具或工件 进行有效支撑 。 1.9 运输及搬运注意事项 机器人运输时需要固定 好原包装,保 证机器人是稳 定的,并保持 干燥。 机器人吊装时,应采取 相应措施进…

8
JAKA Zu 12 v1.0
机器人工作时出现夹伤手指、碰撞伤人的情况;
机器人出现故障没有及时修理而出现的伤人情况;
使用尖锐末端执行器或工具连接端时可能存在危险的情况;
机器人在有毒或者腐蚀性的环境中运转时存在伤人的情况。
1.6 使用用途
JAKA Zu 12 是工业化协作机器人,适用于工业环境中,例如用于操纵设备或固定工具,或用于加工或传递
零件或产品。JAKA Zu
12 只允许在规定的条件与环境下使用。
JAKA Zu
12 具有特殊的安全评级特征,这些特征是特地为协同操作而设计的,也就是说机器人可以在没有
护栏的情况下工作,或者和人类一起工作。协同操作仅针对无危险的应用,即工具、工件、障碍物及其他机器都
经过针对特定应用的风险评估证明不具备重大危险的完整应用。
任何与拟定用途相违的用途或应用都是不允许的。这包括但不限于以下内容:
用于有粉尘等可能发生爆炸的环境中;
用于与生命相关的场合中;
未作危险评判就使用的;
评判的性能等级不合格就使用的;
操作在允许的操作参数之外的。
1.7 紧急情况
当发生紧急情况时,按下急停按钮,可以立即停止机器人的一切运动。紧急停机不可用作风险降低措施,但
可视为次级保护设备。
1.8 无电力驱动的移动
在机器人电源失效或者未使用电源等紧急状况下,可以通过以下两种不同方法来迫使机器人关节移动:
1.强制手动驱动:通过推或拉机器人手臂,能够迫使关节转动。每个关节的制动器均有一个摩擦离合器,
当关节所承受的扭矩大于摩擦离合器的安全扭矩时,关节发生转动。
2. 手动释放制动器:卸下用于固定关节端盖的几颗螺钉后取下关节端盖。按下小型电磁铁(如下图所示)
中的滑杆,可以手动释放制动器。
图
1-1

JAKA Zu
12 v1.0 9
警告:
1.强制手动移动机器人手臂仅限于紧急情况,并且有可能会损坏关节,不可作为日常操作。
2.如果手动释放了制动器,机器人可能会在重力作用下发生运动,因此在手动释放制动器前务必对机器人
本体及安装在机器人上的工具或工件进行有效支撑。
1.9 运输及搬运注意事项
机器人运输时需要固定好原包装,保证机器人是稳定的,并保持干燥。
机器人吊装时,应采取相应措施进行定位,避免产生意外运动造成损伤。
从机器人的包装中将机器人移至安装位置时,应扶住机器人直至机器人底座的所有螺栓全部紧固好。
警告:
1.确保抬升设备时您的背部或身体其他部位不会过分负重。使用适当的抬升设备。节卡不对设备运输过程
中产生的损害负责。
2.确保安装机器人时严格遵守安装指示。
10
JAKA Zu 12 v1.0
第 2 章 欢迎使用小助机器人
在阅读本章前,请确保您已经详细阅读并充分理解第 1 章的《安全规范》。
本章将快速介绍节卡小助系列协作机器人的基本组件与使用方法,作为对机器人的初步了解。详细的机械电
气规格、软件操作手册请参考其它章节。
在使用过程中,如果您需要快速帮助,请拨打我们的快速咨询热线:400-006-2665
2.1 机器人部件概览
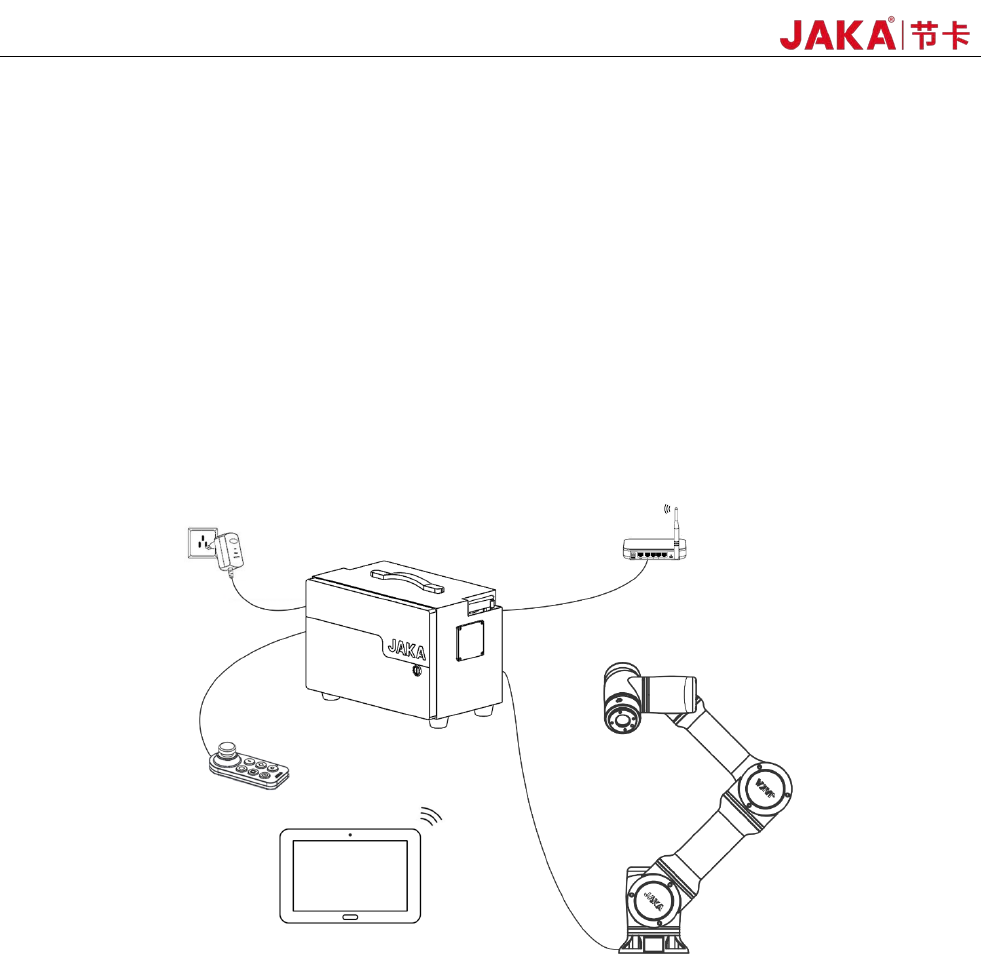
图 2-1 机器人部件概览
如图 2-1 所示,JAKA Zu 系列机器人使用无线互联的方式,使用时需要包括以下几个部件:
操作终端:用户进行编程、设置等操作的设备。
机器人本体:主要运动部件,实现用户期望的动作。同时本体末端布置有指示机器人状态的环形指示灯、用
于拖拽和编程的按钮、以及连接工具的
IO 接口,即 TIO 接口。
电控柜及其手柄:电控柜包括核心运算部件,以及多种电气接口,同时电控柜配备有方便用户操作的手柄。
路由器与网线等:电控柜的网口应连接至路由器上,操作终端同时也连接至此路由器的无线网络内。推荐为
JAKA Zu 系列机器人单独配置路由器以防止与其它设备冲突。
2.2 操作终端
节卡提供基于 Android 系统开发的 JAKA Zu 系列机器人操作软件,该软件推荐的运行硬件配置如表 2-1: