JAKA Zu 12及JAKA Zu 12 pro -电控柜V2.1-硬件手册(中文版).pdf - 第24页
JAKA Zu 12 v 1.0 19 第 4 章 电气接口 4.1 简介 本章描述了机器人和电 控柜的所有电 气接口。 这些接口主要包括以下 几种: • 电控柜前面板接口 • 电控柜底面接口 • 工具端输入输出接 口( TIO ) 下文对这三部分接口进 行了说明,大 部分类型的接 口都提供有 使用 示例。 4.2 电气警告和小心事项 在设计和安装机器人应 用时, 务必遵 循以下警告和 小心事项。 实 施维护作业同 样要遵循这些 警告和…
18 JAKA Zu
12 v1.0
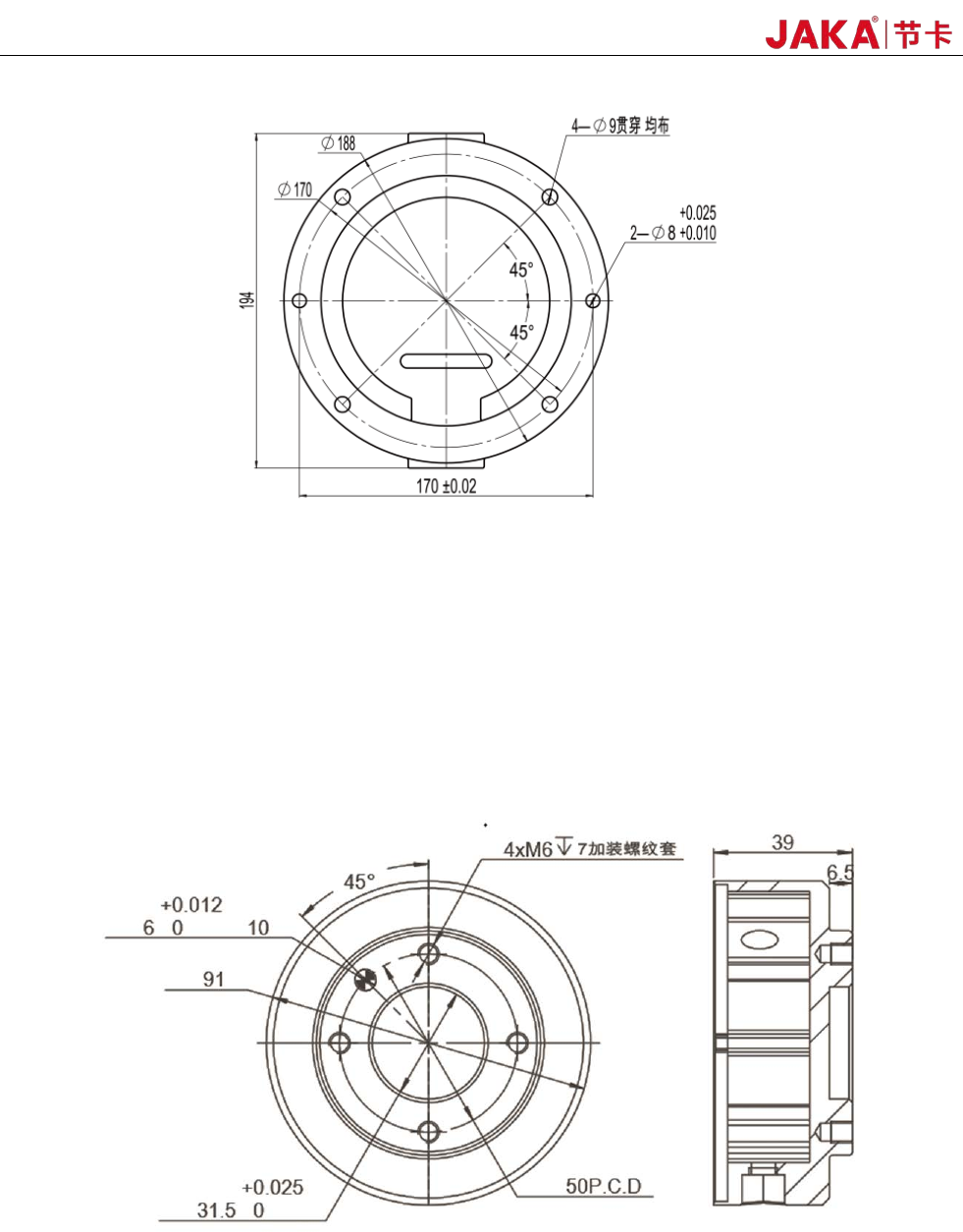
图 3-6 JAKA Zu 12 基座安装尺寸图
3.2.4 末端工具安装
JAKA Zu 12 机器人末端法兰有四个 M6 螺纹孔,可用于将工具连接到机器人。在这些螺纹孔中安装
螺钉时,螺钉需要以 15Nm 的扭矩进行紧固。如果需要非常准确地调整工具位置,还可以在工具端钻∅6mm
销钉孔,用销钉加以定位。图 3-7 显示了钻孔位置和螺钉安装位置,所有测量值均以 mm 为单位。
图 3-7 末端法兰安装尺寸图
JAKA Zu
12 v1.0 19
第 4 章 电气接口
4.1 简介
本章描述了机器人和电控柜的所有电气接口。
这些接口主要包括以下几种:
•电控柜前面板接口
•电控柜底面接口
•工具端输入输出接口(TIO)
下文对这三部分接口进行了说明,大部分类型的接口都提供有使用示例。
4.2 电气警告和小心事项
在设计和安装机器人应用时,务必遵循以下警告和小心事项。实施维护作业同样要遵循这些警告和小心事项。
危险:
1.切勿将安全信号连接到安全等级不合适的非安全型 PLC。如不遵
守该警告,可能会因某项安全停止功能失效而导致严重受伤乃至死
亡。务必将安全接口信号与普通 I/O 接口信号分开。
2.所有安全型信号均具备冗余性(两个独立通道)。保持两个通道
独立,可确保在发生单一故障时不会丧失安全功能。
3.电控柜内部的 I/O 功能介绍,请参考第 4.3 节。
危险:
1.请确保所有严禁沾水的设备都保持干燥。如果有水进入产品,请
及时切断电源,然后联系您的供应商。
2.仅使用该机器人的原装线缆。请不要在那些线缆需要弯折的应用
中使用机器人。如果需要更长的线缆或柔性线缆,请联系您的供应
商。
3.对于保护性接地(PE),请使用电控柜中标记接地标志的螺丝钉接
头。接地连接器至少应具有该系统内最高电流的额定电流。
4.当向电控柜的 I/O 安装接口线缆的时候,打开柜门,去掉出线孔
金属板,并保证 I/O 线缆避免与出线孔边缘磨损。
小心:
1.机器人已通过 CR 认证中规定的电磁兼容性检测。超过标准的干
扰信号将会造成机器人的异常行为。信号电平极高或过度暴露将会
对机器人造成永久性的损害。由超出范围的 EMC 问题造成的任何
损失,节卡概不负责。
2.用于连接电控柜与其他机械或工厂设备的 I/O 线缆长度不得超过
30 米,除非进行延长测试后表明可行,且必要时需使用屏蔽线缆。
20
JAKA Zu 12 v1.0
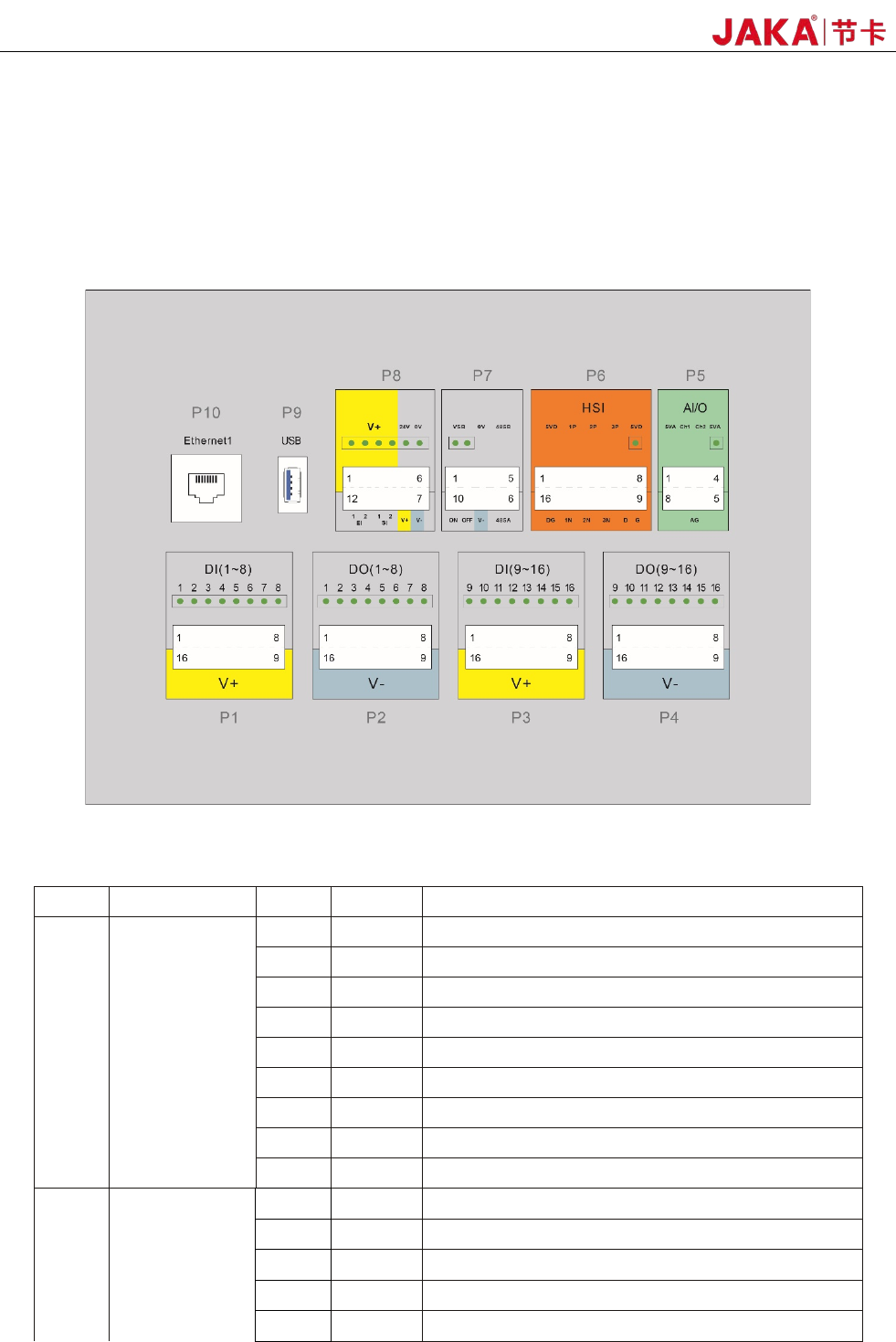
4.3 电控柜前面板接口
电控柜前面板接口布置在电控柜门打开后的第一层,包括 16 个数字输入(P1 与 P3)、16 个数字输出(P2
与 P4)、两个可配置模拟量接口(P5)、一组高速接口(P6)、远程开关机与 485 接口(P7)、安全功能接
口(P8)、USB3.0 接口(P9)与以太网接口(P10),USB 接口与以太网接口保留为内部使用,如有需要可联
系节卡机器人技术支持人员,布局如图 4-1 所示。
图 4-1 电控柜前面板接口示意图
电控柜前面板接口定义一栏表
序号 名称
PIN
接线端 功能
P1
DI(1~8)
8 路数字输入
1 DI1 第 1 路数字输入,PNP 型,高电平有效
2 DI2
第 2 路数字输入,PNP 型,高电平有效
3 DI3 第 3 路数字输入,PNP 型,高电平有效
4 DI4
第 4 路数字输入,PNP 型,高电平有效
5 DI5
第 5 路数字输入,PNP 型,高电平有效
6 DI6
第 6 路数字输入,PNP 型,高电平有效
7 DI7
第 7 路数字输入,PNP 型,高电平有效
8 DI8 第 8 路数字输入,PNP 型,高电平有效
9~16 V+
隔离电源输入正,默认短接片接内部 24V
P2
DO(1~8)
8 路数字输出
1 DO1 第 1 路数字输出,PNP 型,≤1A 持续电流输出能力
2 DO2
第 2 路数字输出,PNP 型,≤1A 持续电流输出能力
3 DO3
第 3 路数字输出,PNP 型,≤1A 持续电流输出能力
4 DO4 第 4 路数字输出,PNP 型,≤1A 持续电流输出能力
5 DO5
第 5 路数字输出,PNP 型,≤1A 持续电流输出能力