JAKA Zu 12及JAKA Zu 12 pro -电控柜V2.1-硬件手册(中文版).pdf - 第28页
JAKA Zu 12 v 1.0 23 电控柜有专用的安全 I/O 接口,用户可通过配置紧 急停止和防护 停止两类功能 。功能定义详见 4.3.7 。下面 举出了一些关于如何使 用安全 I/O 的示例图。 1 、默认出厂安全配置 用户可在没有任何附加 安全设备的情 况下进行操作 机器人, EI1~2 、 SI1~2 分别短接 到 V+ ,而 V+ 短接 到 24V , V - 短接到 0V ,则表明由 电控柜内部 提供 2 4V 电源,…
22
JAKA Zu 12 v1.0
P8
-
1~4、8
V+
隔离电源输入正,默认短接片接内部 24V
5 24V
内部 24V 输出正极,1.5A(max)
6 0V 内部 24V 输出负极
7 V-
隔离电源输入负,默认短接片接内部 GND
9 SI2 防护停止功能输入 2,默认短接片接 V+
10 SI1
防护停止功能输入 1,默认短接片接 V+
11 EI2 紧急停止功能输入 2,默认短接片接 V+
12 EI1
紧急停止功能输入 1,默认短接片接 V+
P9 - - USB USB3.0
P10
- -
Ethernet1
千兆以太网接口
4.3.1 所有数字 I/O 通用接口规范
本文阐述了电控柜的下列 24V 数字 I/O 的电气规范。可分为:
V+电源选择、安全 I/O 配置。
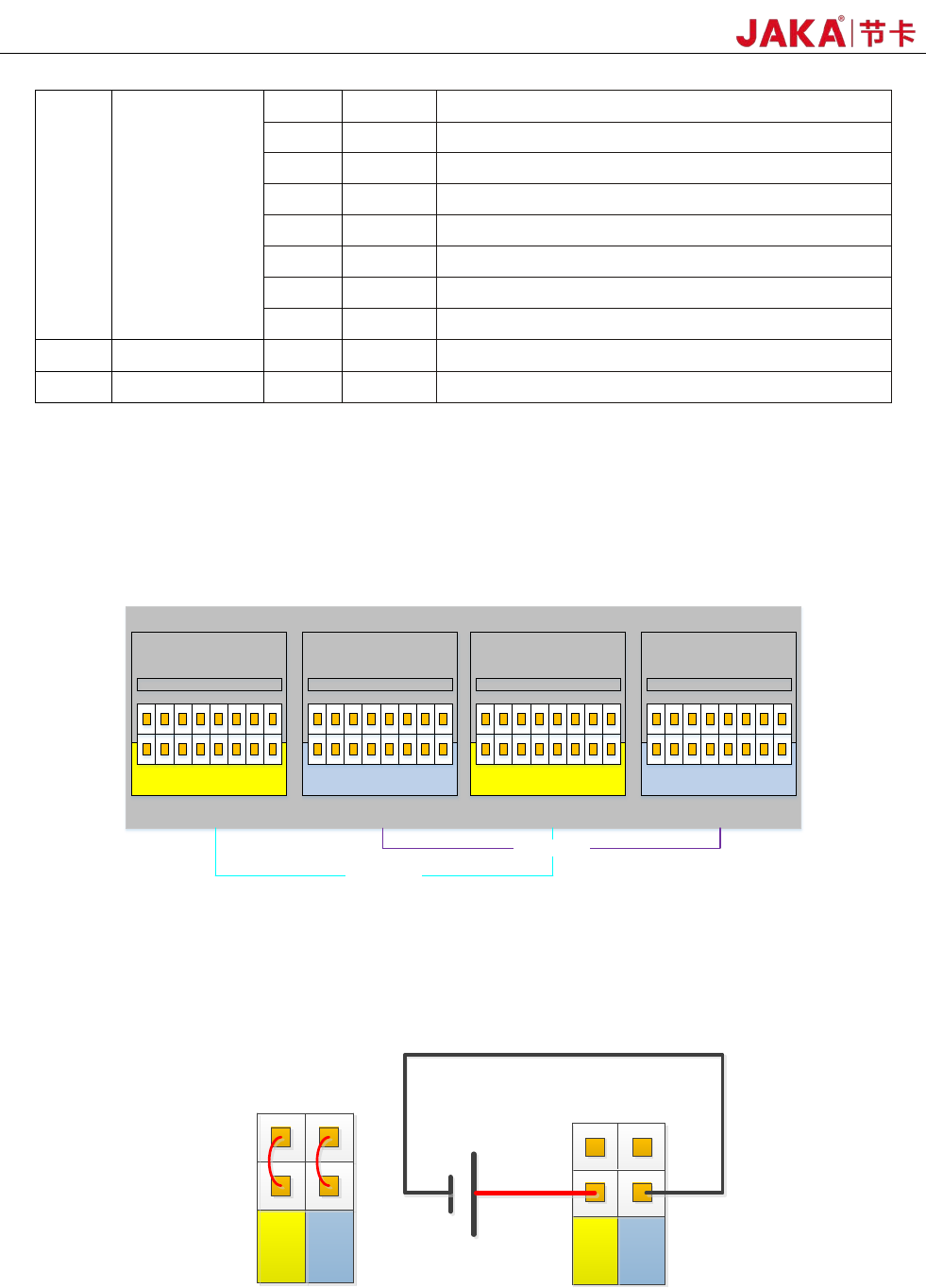
该电控柜支持 16 路的数字输入和 16 路的数字输出,如下图 4-2:
图 4-2
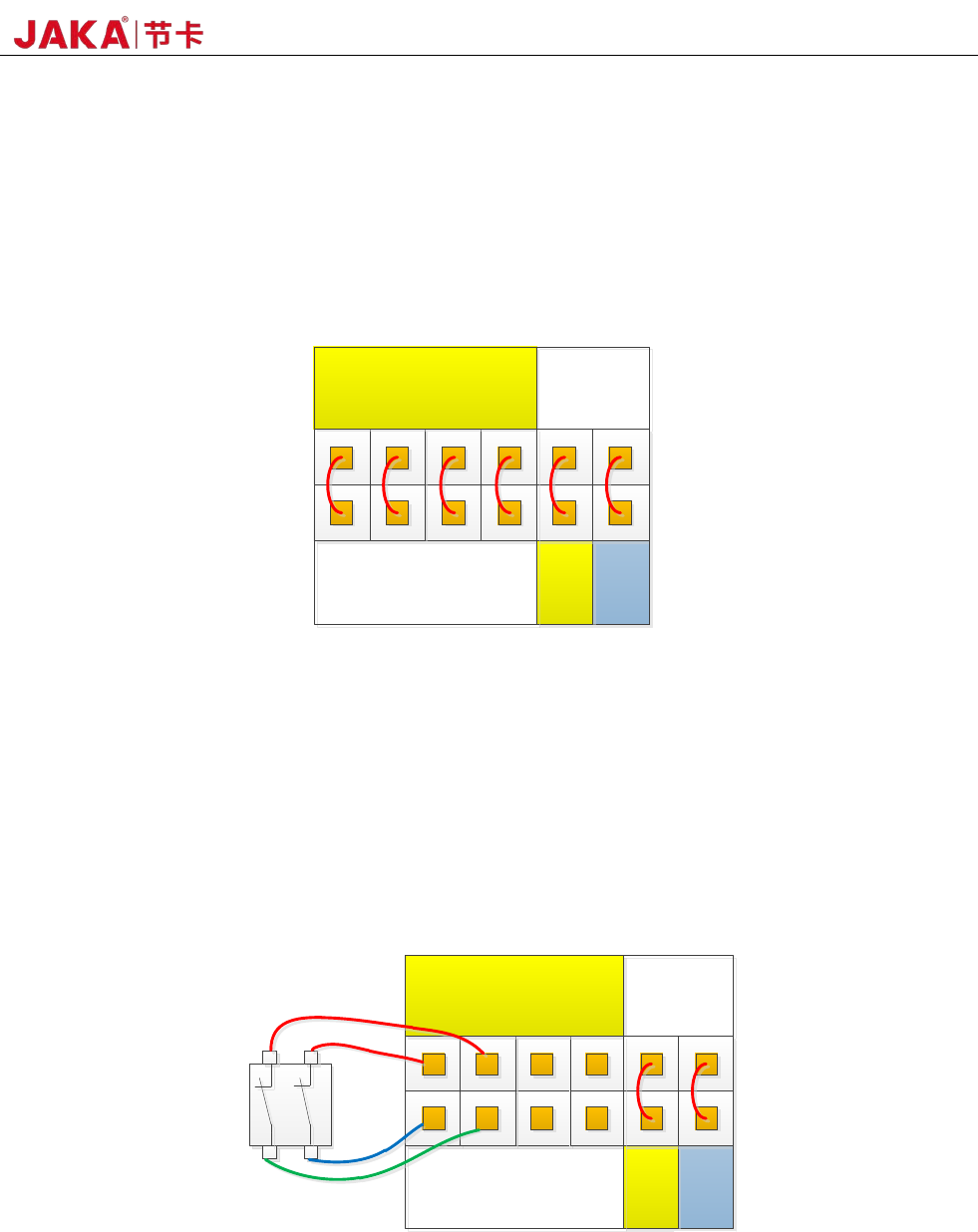
数字 I/O 可由电控柜内部提供的 24V 电源供电,支持 1.5A 输出能力(过载时关闭输出),当用户需要更大
功率输出时,可通过外接“电源”来给 V+电源供电。24V 为内部电源正,0V 为内部地。V+为所有通用数字 I/O
接口的正极,V-为负。出厂默认配置为接内部电源,参见下图 4-3:
V+ V-
24V
0V
P8
接内部电源
V+ V
-
24
V
0V
P8
接外部电源
+-
图 4-3
1 2 3 4 5 6 7 8
DI(1~8)
V+
1 2 3 4 5 6 7 8
DO(1~8)
V-
9 10 11 12 13 14 15 16
DI(9~16)
V+
9 10 11 12 13 14 15 16
DO(9~
16
)
V-
P1 P2 P3 P4
16路数字输入
16路数字输出
JAKA Zu
12 v1.0 23
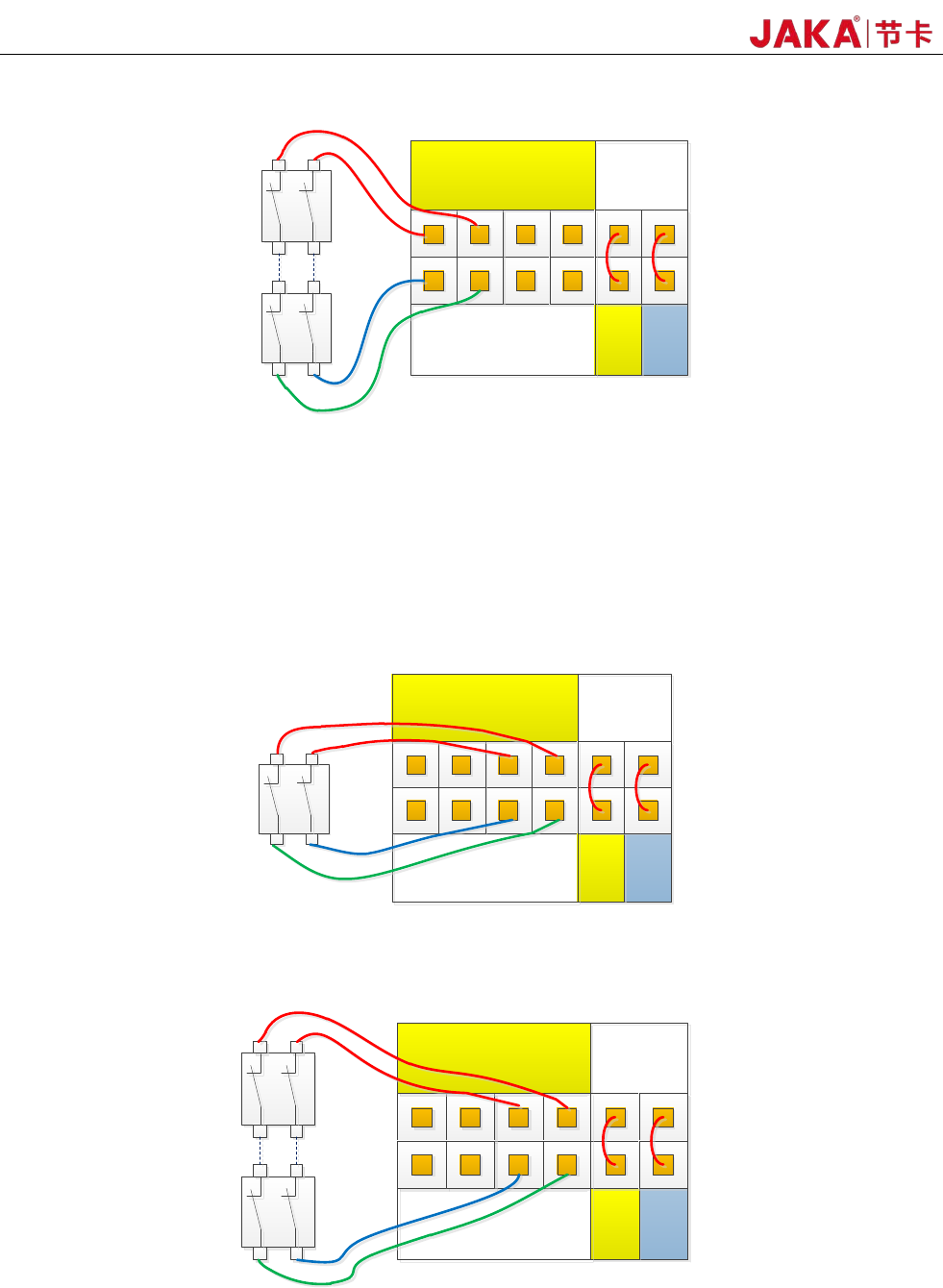
电控柜有专用的安全 I/O 接口,用户可通过配置紧急停止和防护停止两类功能。功能定义详见 4.3.7。下面
举出了一些关于如何使用安全 I/O 的示例图。
1、默认出厂安全配置
用户可在没有任何附加安全设备的情况下进行操作机器人,EI1~2、SI1~2分别短接到 V+,而 V+短接到 24V,
V-短接到 0V,则表明由电控柜内部提供 24V 电源,请参阅下图 4-4:
24V
0V
P8
默认出厂安全配置
EI
1 2
SI
1 2
V+
V+ V-
0V
24V
P8
图 4-4
2、连接紧急停止开关
在大多数应用中,为了便于安全操作,需要使用一个或多个额外的紧急停止或者防护停止开关,下图 4-5、
图 4-6 展示了一个或者多个紧急停止开关的工作原理。其中 V+、V-也可外接外部 24V 电源。
24V
0V
P8
紧急停止-单路开关
EI
1 2
SI
1 2
V+
V+ V-
0V
24V
P8
图 4-5
24
JAKA Zu 12 v1.0
24V
0
V
P8
紧急停止
-多路开关
EI
1 2
SI
1 2
V+
V+ V-
0V
24V
P
8
图 4-6
3、连接防护停止开关
防护停止功能,支持自动恢复。门开关就是防护停止设备的一个应用案例,门打开时,机器人停止。接线图
如下图 4-7:
24
V
0V
P
8
防护停止-单路开关
EI
1 2
SI
1
2
V+
V+ V
-
0V
24V
P
8
24V
0V
P8
防护停止-多路开关
EI
1 2
SI
1 2
V+
V+ V-
0V
24V
P8
图 4-7