JAKA Zu 12及JAKA Zu 12 pro -电控柜V2.1-硬件手册(中文版).pdf - 第19页
14 JAKA Zu 12 v 1.0 第 3 章 机械规格 机器人主要由六个关节 和两个铝制臂 杆组成 (如图 3-1 所示) , 基座用 于机器人本 体和底座连接,工具端用 于机器人与工具连接。 工具 可在机器人的工作空间 内做平移和旋 转运动。 下面章节将介绍安 装机器人系统 的各个 部件时应注意的基本事 项。 图 3-1 小助机器人本体结构 图 3.1 机器人工作空间 3.1.1 机器人外形尺寸 J A K A Z u 12 机…
JAKA Zu
12 v1.0 13
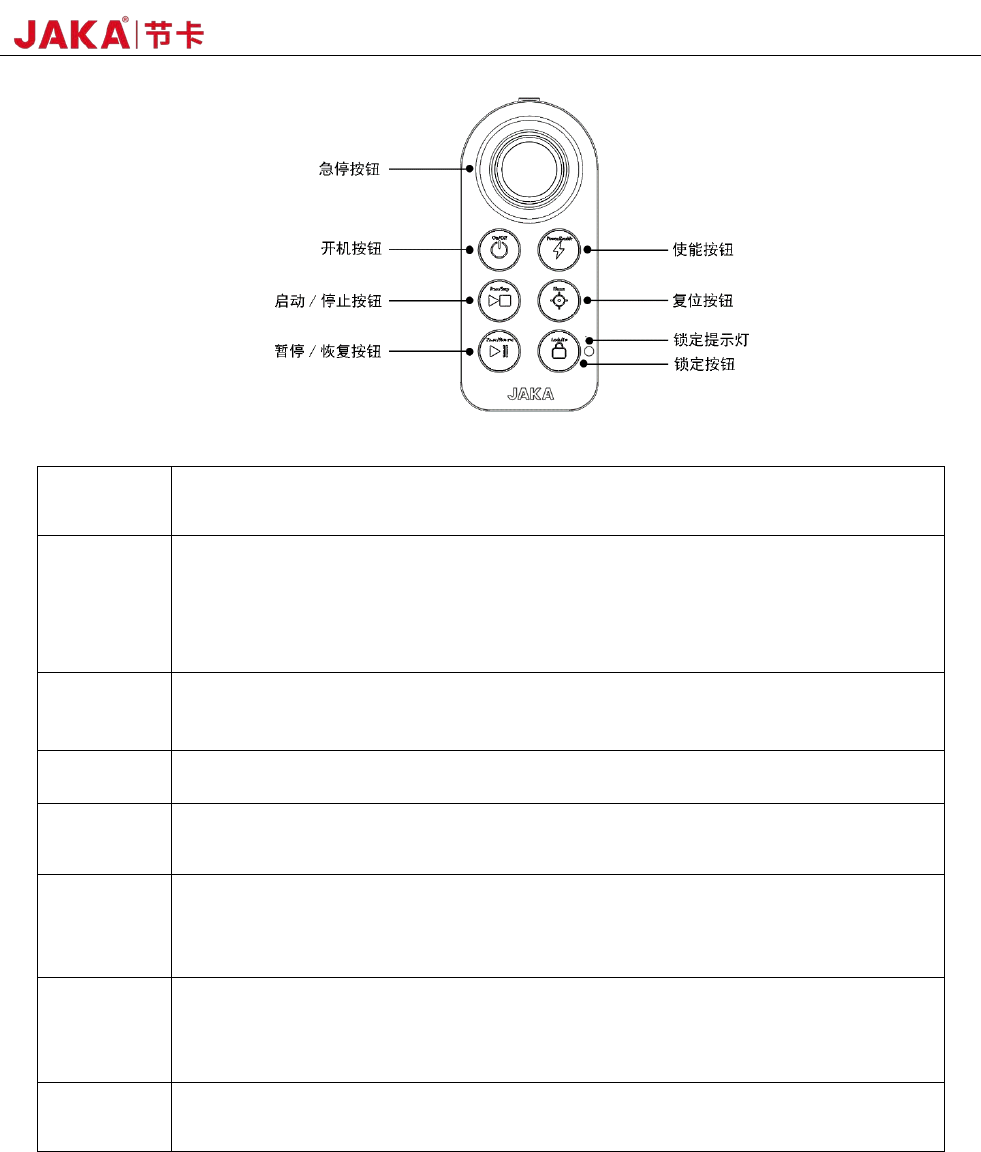
图 2-4 手柄按键功能说明
开机
开机:短按 1s 开机键后松开,蜂鸣器响,电控柜开机。
关机:长按开机键 3s 以上,手柄蜂鸣 6~7 次,电控柜关机。
使能
机器人通电:电源未打开情况下,短按则机器人上电。
机器人断电:电源打开情况下,短按则机器人关电。
机器人上使能:电源打开情况下,短按锁定键+使能键。
机器人下使能:机器人使能情况下,短按锁定键+使能键。
启动/终止
开始程序运行:短按终止按钮,启动加载的默认程序,运行到程序的初始位置后,执行
默认程序。
终止程序运行:机器人运行程序中,短按终止程序运行。
复位
复位:机器人使能后,在非运行程序过程时,持续按压,控制机器人运行到设定的默认
位置。当程序运行到默认位置时,持续按压,锁定提示灯为蓝色呼吸。
暂停/恢复
暂停:机器人自动运行过程中,按下暂停程序执行。
恢复:机器处于暂停状态,按下恢复程序执行。
锁定
锁定手柄:长按锁定键 3s,锁定提示灯为橙色呼吸。
解锁手柄:长按锁定键 3s,锁定提示灯熄灭。
组合功能:其它按键与锁定键可搭配使用。
锁定提示灯
锁定状态:处于锁定状态时,锁定提示灯橙色呼吸,除锁定与开关按钮之外,其它按钮
无效。
APP 可以对机器人进行控制。
解锁状态:处于解锁状态时,灯熄灭,可使用手柄。APP 界面灰色,不能再对机器人
进行任何控制。
急停按钮
急停用。
注意:急停按钮仅作为紧急情况下使用,不可作为一般的关电设备使用。
表 2-3 手柄功能说明表
注:
完成上电后,按下任何按键,手柄会以每秒 2 次的频率蜂鸣。
上电过程中,JAKA 灯先进行红、蓝、绿的交替呼吸,并伴随三次蜂鸣,然后 JAKA 灯橙色等待工控机上线。
控制器程序正常运行时 JAKA 灯蓝色呼吸。使能机器人后,JAKA 灯绿色呼吸。
使用手柄操作机器人时,请确保所操作的机器人在视线范围之内,并遵循相关安全守则,防止对机器人周边
人员或或设备造成伤害。
14
JAKA Zu 12 v1.0
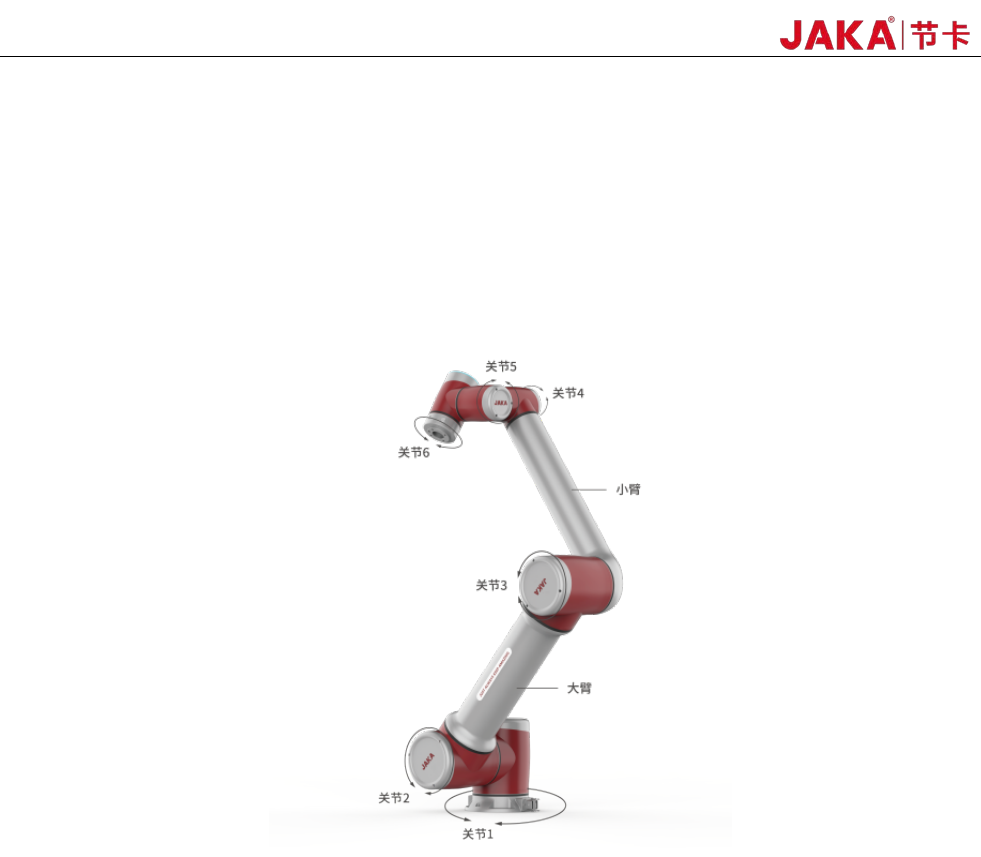
第 3 章 机械规格
机器人主要由六个关节和两个铝制臂杆组成(如图 3-1 所示),基座用于机器人本体和底座连接,工具端用
于机器人与工具连接。工具可在机器人的工作空间内做平移和旋转运动。下面章节将介绍安装机器人系统的各个
部件时应注意的基本事项。
图 3-1 小助机器人本体结构图
3.1 机器人工作空间
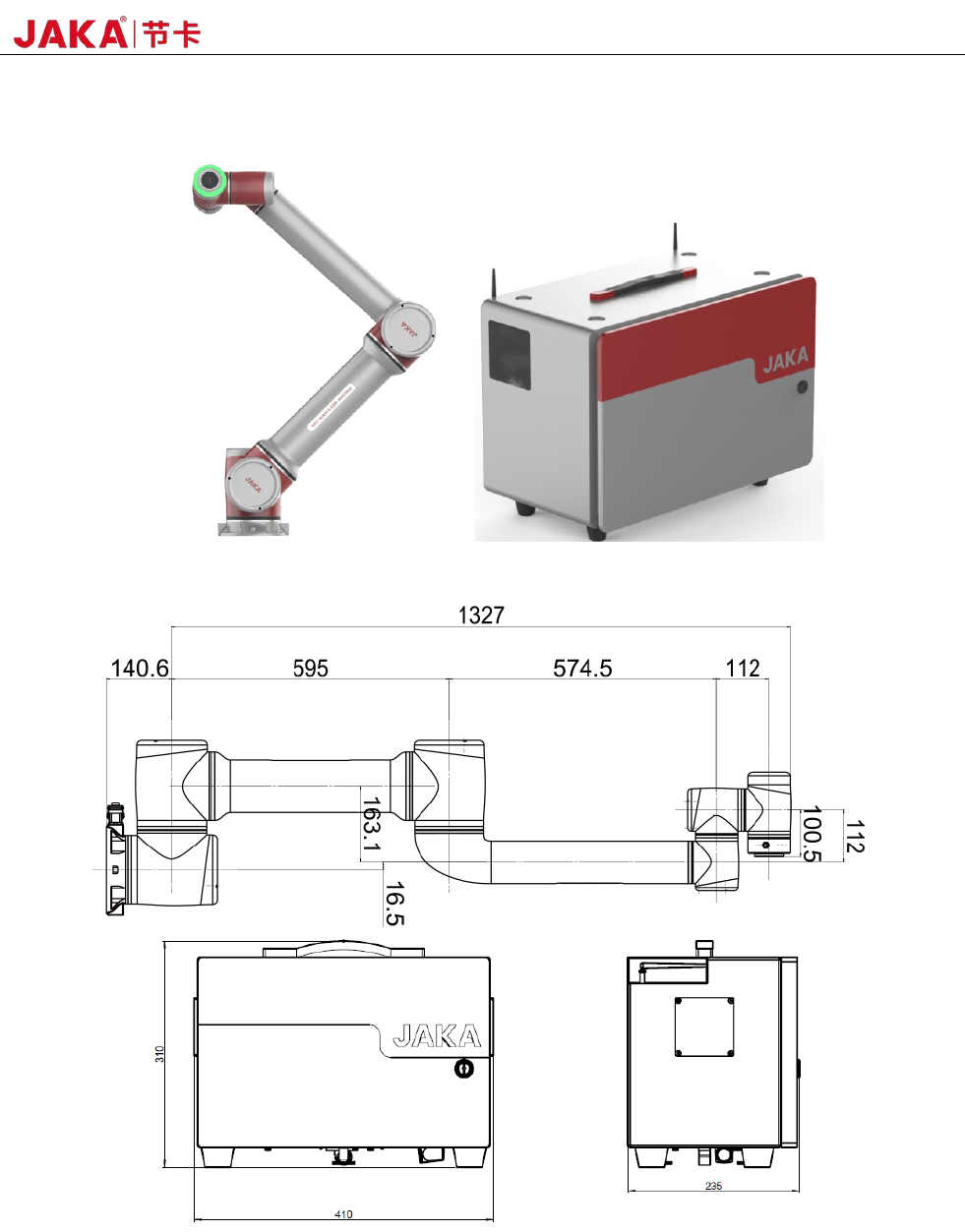
3.1.1 机器人外形尺寸
JAKA Zu 12 机器人与电控柜的实物照片与外形尺寸如图 3-2、图 3-3 所示。在安装时务必考虑到机器人的
运动范围,以免伤害周围人员和设备。
JAKA Zu
12 v1.0 15
图 3-2 JAKA Zu 12 与电控柜实物图
图 3-3 JAKA Zu 12 与电控柜外形尺寸图
3.1.2 机器人的工作空间
JAKA Zu 12 机器人的工作空间如图 3-4 所示,选择机器人安装位置时,必须考虑机器人正上方和正下方的
圆柱体空间,尽可能避免将工具移向圆柱体空间。因为这样会造成工具运动较慢时,关节却转动过快,从而导致
机器人工作效率低下,风险评估难以进行。