JAKA Zu 12及JAKA Zu 12 pro -电控柜V2.1-硬件手册(中文版).pdf - 第35页
30 JAKA Zu 12 v 1.0 图 4-1 6 重载连接器接口定 义图 警告: 1. 禁止在机器人未 完全断电时,断开 机器人电缆。 2. 禁止延长或改装原 线缆。 4.5 工具端输入输出接口 工具端输入输出接口简 称 TI O ( T ool Input and Output ) 布置在 机器 人工具法兰 侧面, 包括 两个 数字量输入, 两个数字量输出与一个 模拟量输入, 其接口定义请 参考 4.5.1 章节: 如果需要选配…
JAKA Zu
12 v1.0 29
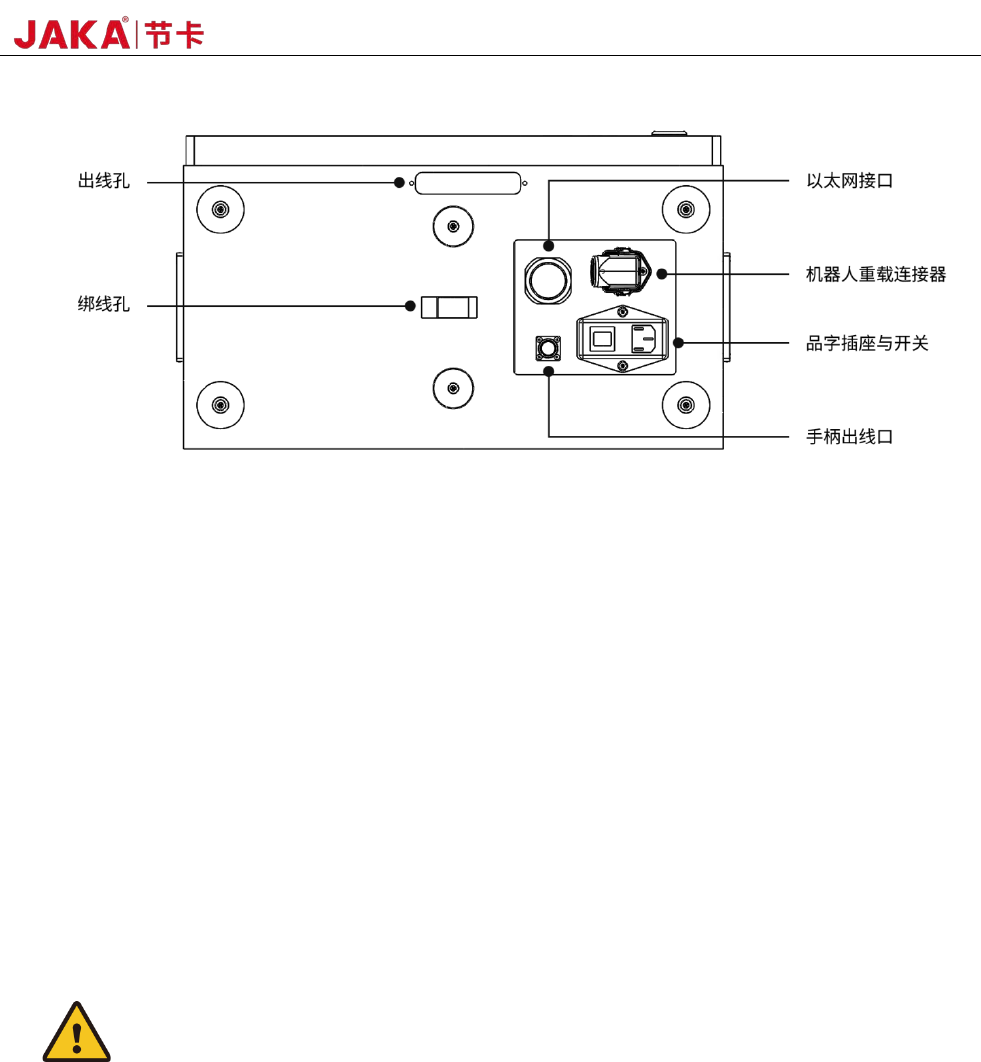
图 4-15 电控柜底面板示意图
4.4.1 电源连接
机器人电源连接线随机器人提供,电源线一端为品字插头插在电控柜底面板的品字插座上,另一端为三角插
头,根据安全评估规范,插到相应的市电插座上。品字插座带有开关和保险丝。开关仅限于在机器人关机状态下
使用,以将机器人电源彻底断开。开关内配备的保险丝型号,请根据机器人工作工况进行选择使用,出厂时配置
为 10A。
机器人所使用的电源至少应配备:
•接地;
•市电保险丝;
•剩余电流断路器。
建议对机器人应用中的所有设备的电源安装电源开关,以便于在维修时上锁挂牌。
警告:
1.请确保机器人以正确的方式接地(电气接地)。
2.请确保电控柜电源的输入电流受到剩余电流装置(RCD)和适当的保险丝的保护。
3.完成所有服务所需的机器人安装设置后,所有的电源都需上锁挂牌。当系统上锁后,其他设备都不可给
机器人任何部分供电。
4.请确保所有的电缆在电控柜通电前都正确连接。始终正确使用原装的电源线。
4.4.2 机器人连接
使用节卡提供的机器人连接电缆连接机器人与电控柜。启动机器人时,务必锁紧连接器。断开机器人线缆时,
必须先切断机器人电源。重载连接器接口定义,如下图 4-16 所示。

30
JAKA Zu 12 v1.0
图 4-16 重载连接器接口定义图
警告:
1.禁止在机器人未完全断电时,断开机器人电缆。
2.禁止延长或改装原线缆。
4.5 工具端输入输出接口
工具端输入输出接口简称 TIO(Tool Input and Output) 布置在机器人工具法兰侧面,包括两个数字量输入,
两个数字量输出与一个模拟量输入,其接口定义请参考 4.5.1 章节:
如果需要选配 TIO 外部连接线,请拨打我们的快速咨询热线 400-006-2665。该连接线线束定义与规格如下
图 4-17 所示。
图 4-17 对外连接线
4.5.1 工具端 TIO 对外接口定义
工具端 TIO 对外接口定义表如下:
引脚 定义 I/O 线的颜色 描述
JAKA Zu
12 v1.0 31
1 +24V - 红色 24V 电源正极,最大输出连续电流 1A
2 DI1 I 蓝色 数字输入 1,NPN 型,接光耦阴极输入端
3 DI2 I 绿色 数字输入 2,NPN 型,接光耦阴极输入端
4 DO1 O 黄色 数字输出 1,NPN 型,开漏输出,单通道电流≤0.5A
5 DO2 O 粉色 数字输出 2,NPN 型,开漏输出,单通道电流≤0.5A
6 AIN_P I 棕色 模拟输入:正极,检测范围为±10V,与 AIN_N 引脚去耦
7 AIN_N I 白色 模拟输入:负极,与 AIN_P 引脚去耦
8 GND - 灰色 24V 电源负极
1、TIO 模拟电压输入接口电路
支持 1路模拟电压输入接口,其电压输入范围为 0~10V,将模拟电压 AI正端接入 AIN_P引脚,负端接 AIN_N。
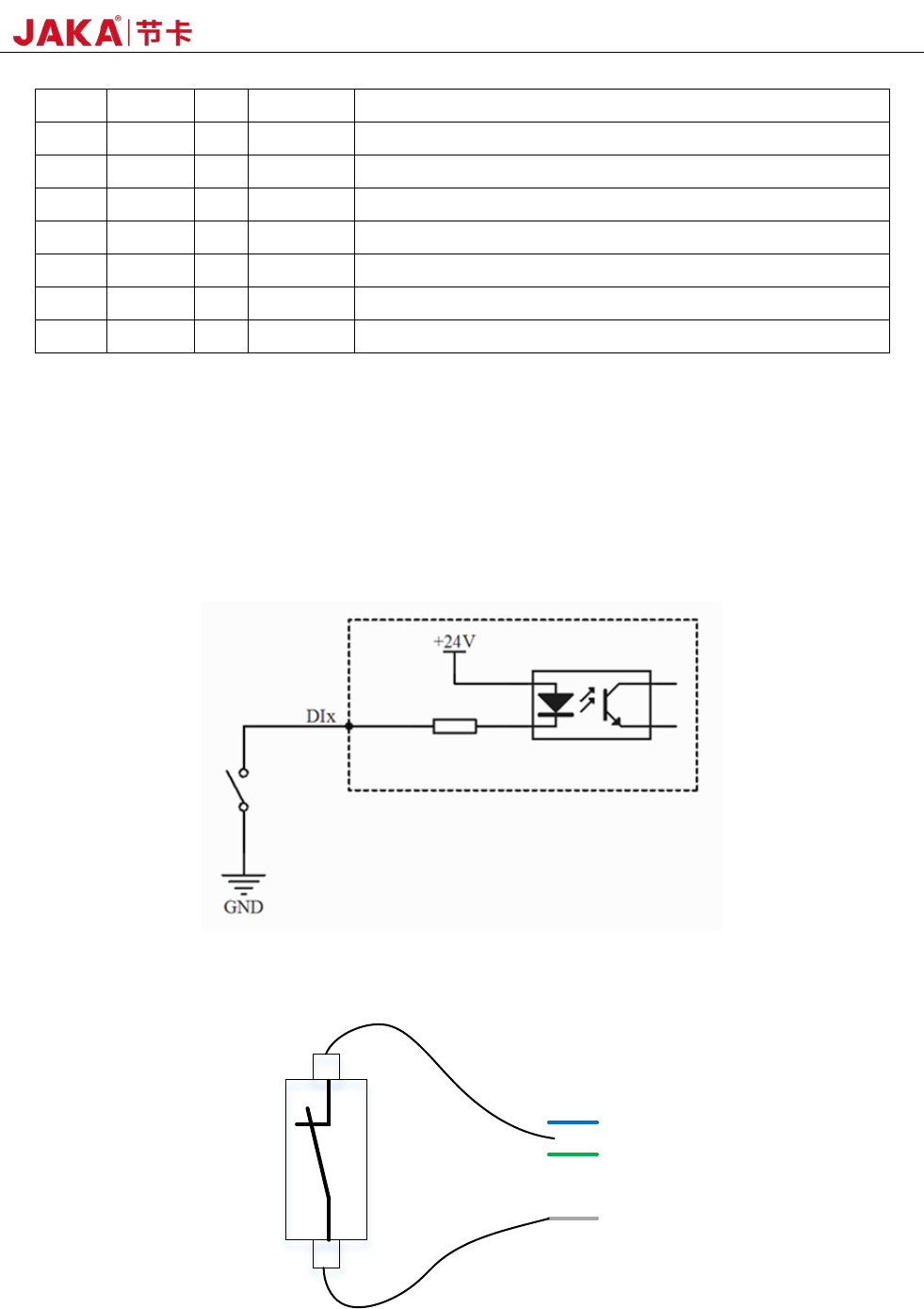
2、TIO 数字输入接口电路示例
TIO 支持 2 路用户 DI 数字输入接口,NPN 型。内部光耦阴极输入,串接 4.7K 电阻,阳极内部连接 24V 电
压,当 DI1 输入低电平(GND)时有效。
图 4-18
a) 干接点型输入
图 4-19
干接点型 输 入( 即开关型输入)一端连接 TIO 中 24V 电源负极(灰色线),另一端连接 DI 数字输入(蓝
灰
绿
蓝