JAKA Zu 12及JAKA Zu 12 pro -电控柜V2.1-硬件手册(中文版).pdf - 第38页
JAKA Zu 12 v 1.0 33 4. 6 技术规格 1. JAKA Zu 12 机器人技术规格: 机器人型号 JAKA Zu 12 产品特性 有效负载 12 kg 重量(含电缆) 41 kg 工作半径 1327mm 重复定位精度 <±0.03mm 自由度 6 编程 图像化编程、拖拽编程 示教器类型 移动终端( PA D / 手机) APP 协作操作 根据 G B1 1291 .1 - 2 0 11 进行协同操作 动作范围及…
32
JAKA Zu 12 v1.0
色或绿色线),如图 4-19 所示。
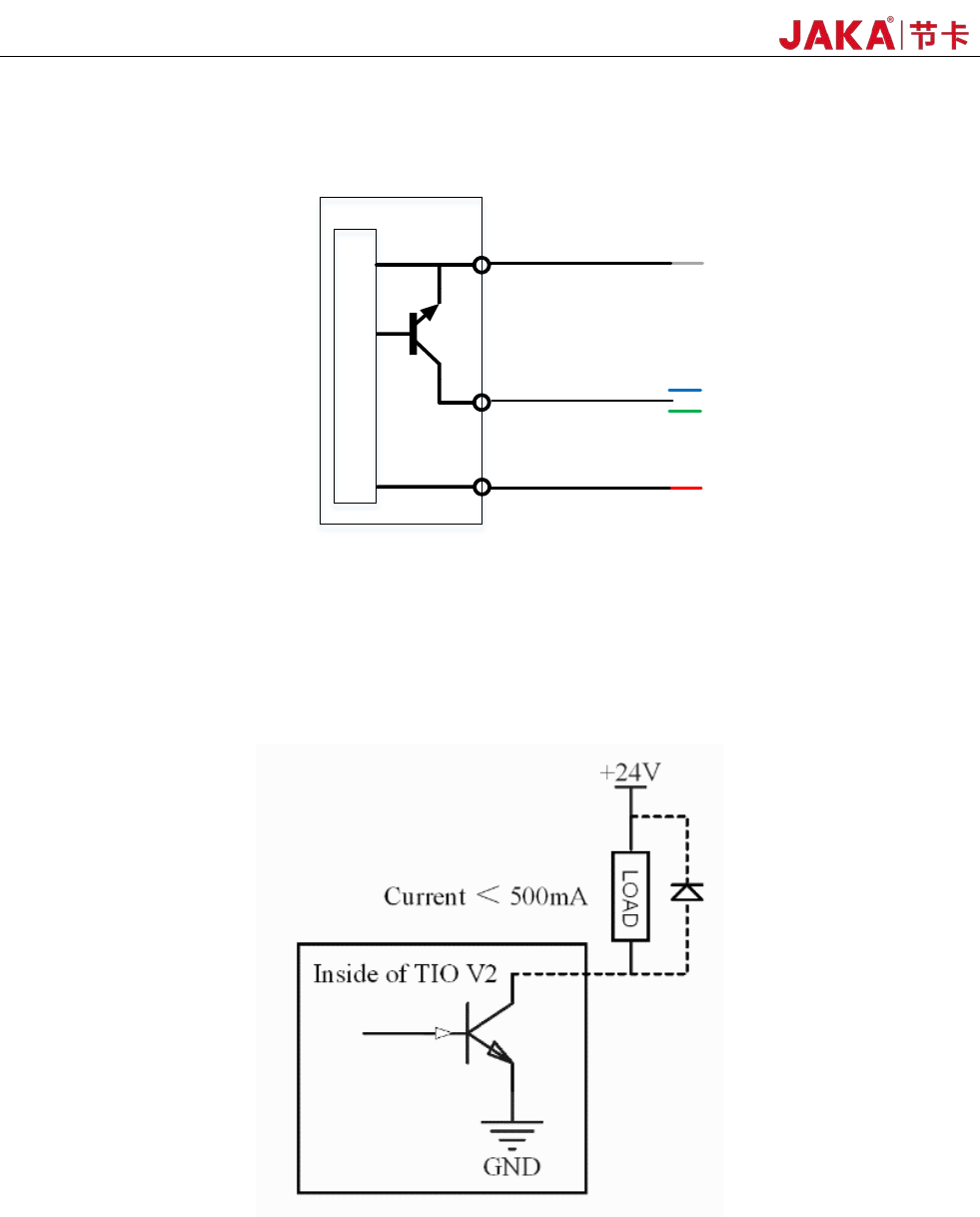
b) NPN 型输入
图 4-20
NPN 型数字量输入设备连接方式如图 4-20 所示:V+连接 24V 电源正极(红色线),0V 连接 24V 电
源负极(灰色线),信号线连接 DI 数字输入(蓝色或绿色线)。
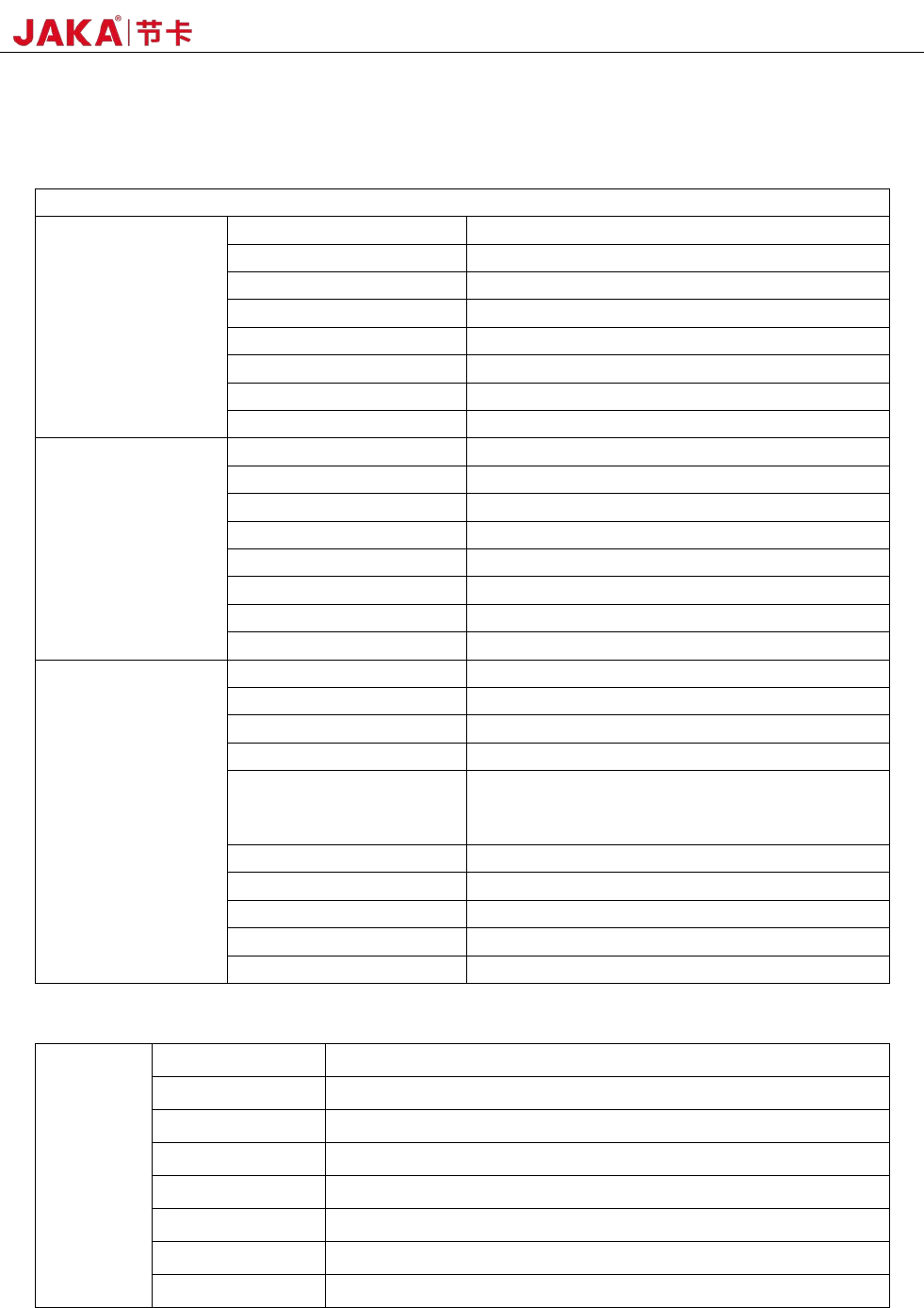
3、TIO 数字输出接口电路示例
数字输出接口为 NPN 型输出,采用开集(Open Collector)输出,最高支持连续 500mA 电流能力输出。
图 4-21
*注意:强烈推荐为电感性负载使用保护二极管(如继电器、电磁铁、直流电机等)。否则可能造成该端口
永久损坏!
0V
NPN型
V+
OUT
主
电
路
灰
绿
蓝
红
JAKA Zu
12 v1.0 33
4.6 技术规格
1.JAKA Zu 12 机器人技术规格:
机器人型号
JAKA Zu 12
产品特性
有效负载
12kg
重量(含电缆) 41kg
工作半径 1327mm
重复定位精度 <±0.03mm
自由度 6
编程 图像化编程、拖拽编程
示教器类型 移动终端(PAD/手机)APP
协作操作 根据 GB11291.1-2011 进行协同操作
动作范围及速度
机械臂 动作范围 最大速度
关节 1 ±270° 120°/s
关节 2 -85°、+265° 120°/s
关节 3 ±175° 120°/s
关节 4 -85°,+265° 180°/s
关节 5 ±270° 180°/s
关节 6 ±270° 180°/s
工具端最大速度 / 3m/s
物理性能及其他
功耗 平均
500W
温度范围 0-50°C
IP 等级 IP54
机器人安装 任意角度安装
工具 I/O 端口
数字输入
2
数字输出 2
模拟输入
1
工具 I/O 电源 24V
底座直径 188mm
材质 铝合金、PC
工具 I/O 尺寸 M8
机器人连接电缆长度 6m
2.电控柜技术规格:
电控柜
IP 等级 IP44
电控柜 I/O 端口 16 个数字输入/16 个数字输出/2 个模拟输入或输出
电控柜 I/O 电源 24V
通信方式 TCP/IP, Modbus TCP, Modbus RTU
电源 100-240VAC,50-60Hz
电控柜尺寸 410*307*235(mm)(W*H*D)
重量 16kg
材质 不锈钢合金
34
JAKA Zu 12 v1.0
第 5 章 维护和维修
维护和维修工作务必严格遵守本手册的所有安全指示。
维修必须由节卡授权的系统集成商或节卡的工作人员进行。
零件退回给节卡时应按服务手册的规定进行操作。
5.1 安全指示
维护维修后,必须进行核对以确保服务要求的安全级别。核对时必须遵守有效的国家或地方性安全法律法规。
同时应检测所有安全功能是否都正常。
维护维修工作的目的是为了确保系统正常运转,或在故障状态时,帮助系统恢复正常运转状态。维修包括故
障诊断和实际的维修。
操作机器人或电控柜时必须遵循以下安全程序和警告事项:
危险:
1.禁止改变软件安全配置中的任何信息。如果安全参数变更,
整个机器人系统应被视为新系统,这就意味着所有安全审核过
程,比如风险评估,都必须更新。
2.使用部件号相同的新部件或节卡批准的相当部件替换故障
部件。
3.该工作完成后立即重新激活所有禁用的安全措施。
4.将所有维修操作记录下来,并保存在整个机器人系统相关的
技术文档中。
危险:
1.从电控柜底部移除主输入电缆以确保其完全断电。断开机器
人或电控柜连接的其他能源。采取必要的预防措施以避免其他人
在维修期间重新接通系统能源。
2.重新开启系统前请检查接地连接。
3.拆解机器人或电控柜时请遵守 ESD 法规。
4.避免拆解电控柜内的供电系统。电控柜关闭后其供电系统仍
可能残留高压达数小时。
5.避免水或粉尘进入机器人或电控柜。