CM602 操作维修手册.pdf - 第258页
CM602-L 维修手册 2.1 关于机器参数 Pa ge 2- 12 (7/7) No. 参数名 设定为 [ 有 ] 时 设定为 [ 无 ] 时 ( 默认值 ) 65 ‘ 检测出吸嘴过滤器 脏污时 禁止生产 ’ 通过自我诊断检测出吸 嘴过滤器脏污时, 不 会继续生产,而返回到 主菜单。 通过确认画面,可以继 续生产。 66 ‘ 手动部品用完设定 ’ ( 特殊吸嘴专用 ) 由于认识错误而停止时 , 可以将该供料器设 定为部品用完。 ( …
CM602-L
维修手册
2.1
关于机器参数
Page 2-11
(6/7)
No.
参数名
设定为
[
有
]
时
设定为
[
无
]
时
(
默认值
)
59
‘
变更芯片数据暂时保存
’
限设有变更数据暂时保存功能的特殊规格
时有效。
在机器上进行芯片数据的更改动作,不能当
场上载至
PT
,但变更·确认后能以
‘
上载
’
钮
将已经变更的数据进行上载。
(
最大变更数据量为
10
个。
)
不进行如左所述的动作。
60
‘
各工作台不良标记识别
’
对各个工作台进行各区块的实装点的有无
判断后,仅对有实装点的区块进行不良标记
识别。
进行区块分割实装
(
∗
1)
时,我们建议将
‘
各工
作台不良标记识别
’
设为有。
由于对每个工作台分别进行不良标记识别,
区块分割实装除外,生产节拍有可能变慢。
对区块分割实装除外,基本上不需要设定。
不进行如左所述的判断,进行在生产数据中
所设定的不良标记识别。
61
‘
开始生产时
开闭托盘箱挡板
’
(
仅限于有托盘的机器
)
为了补正托盘托盘箱内的托盘托盘板伸出
到正常位置外的状态,当生产开始时或从暂
时停止状态再开始运转时,进行托盘托盘箱
挡板的开闭动作。
因机器停止时的操作和振动等原因,而造成
托盘托盘板位置稍微伸出到正常位置之外
等情况时有效。
(
通常,仅在生产运转中的循
环结束时,进行挡板的开闭动作。
)
不进行如左所述的动作。
62
‘部品厚度超出范围时确
认’
自动运转时的部品厚度测量结果超出其范
围时,显示将测量结果反映到芯片数据的确
认画面。
不进行如左画面的动作,判定为错误。
63
‘部品配置表变更时确认’ 在部品配置表
/
供料器布局画面上,不仅通过
[
变更
]
来进行
‘
式样
’ ‘
深
(
角度
) ’ ‘RTY’
‘
跳跃
’
的变更,按
[
变更
]
后还显示确认画面。
不显示如左画面,进行更新。
64
‘
多功能吸头供料器
预先进给
’
为了缩短吸着前的部品进给时间,在吸着之
前对多功能吸头不进行编带进给,而在部品
吸着后进行供料器进给
(
进给量为下一趟吸
着的分量
)
。因此,部品处于吸着位置的状态,
即为初始位置。在生产数据示教、芯片识别
示教中进行吸着动作时,也有必要在将部品
送到吸着位置的状态下,事先将其设置好。
另外,根据动作参数
[
供料器预先进给最小进
给量
[mm]]
,可以设定预先进给的对象供料
器。
不进行如左所述的动作。
∗
1
: 这是使用
PT
上已进行区块分割分配的生产数据的实装方法。对每个工作台分配要实装的区块。
(PT200
选购件规格
)
下一页
EJM8A-C-MMC02-A01-02
CM602-L
维修手册
2.1
关于机器参数
Page 2-12
(7/7)
No.
参数名
设定为
[
有
]
时
设定为
[
无
]
时
(
默认值
)
65
‘检测出吸嘴过滤器脏污时
禁止生产’
通过自我诊断检测出吸嘴过滤器脏污时,不
会继续生产,而返回到主菜单。
通过确认画面,可以继续生产。
66
‘手动部品用完设定’
(特殊吸嘴专用)
由于认识错误而停止时,可以将该供料器设
定为部品用完。
(限于8吸嘴/12吸嘴)
不进行如左动作。
67
‘动作参数变更时确认’ 变更动作参数的设定时,显示确认信息。 不进行如左动作。
68
‘不良吸头设定变更时确
认’
变更不良吸头的设定时,显示确认信息。另
外,将设定变更作为事件传送到PT。
不进行如左动作。
69
‘XY轴动作速度控制’ 检查XY轴的负荷率,以在发生过负荷之前减
低实装速度以防错误发生于未然。
不进行如左处理。
70
‘托盘部品任意角度吸着’ 可以在配置表输入任意角度的式样及角度。无法进行如左输入。
71
‘机种切换时清除吸着信
息’
于机种切换 (生产数据变更) 时,使吸着信
息复位。
不进行如左处理。
72
‘自动运转开始时切断编
带’
开始自动运转时,在已有设置供料器的工作
台进行切断编带的动作。
不进行如左动作。
73
‘最优化数据错误时暂定生
产’
根据最优化数据检查结果为错误的生产数
据,也可以暂时作为“无最优化”来执行生产。
根据最优化数据检查结果为错误的生产数
据,无法执行生产。
74
‘台车下降时供料器第2原
点清零’
若在供料器整体交换画面上按[供料器基座
下降],则清除下降时置在台车上的所有供料
器的第2原点。
不进行如左处理。
75
‘高部品邻接实装A工作台’ 在A工作台上,将部品实装到有厚度部品的
附近时,在某些条件下稀少会发生干涉,因
此进行回避干涉的动作。
(
关于高部品邻接实装)
不进行如左动作。
76
‘高部品邻接实装B工作台’
(限于有2个工作台的机器)
在B工作台上,将部品实装到有厚度部品的
附近时,在某些条件下稀少会发生干涉,因
此进行回避干涉的动作。
(
关于高部品邻接实装)
不进行如左动作。
77
‘元件吸着后基板识别’
(仅限于1吸头机器)
在搬入基板时识别基板前,进行元件的吸着
及识别,以提高生产率。
不进行如左动作。
EJM8A-C-MMC02-A01-03
CM602-L
维修手册
2.1
关于机器参数
Page 2-13
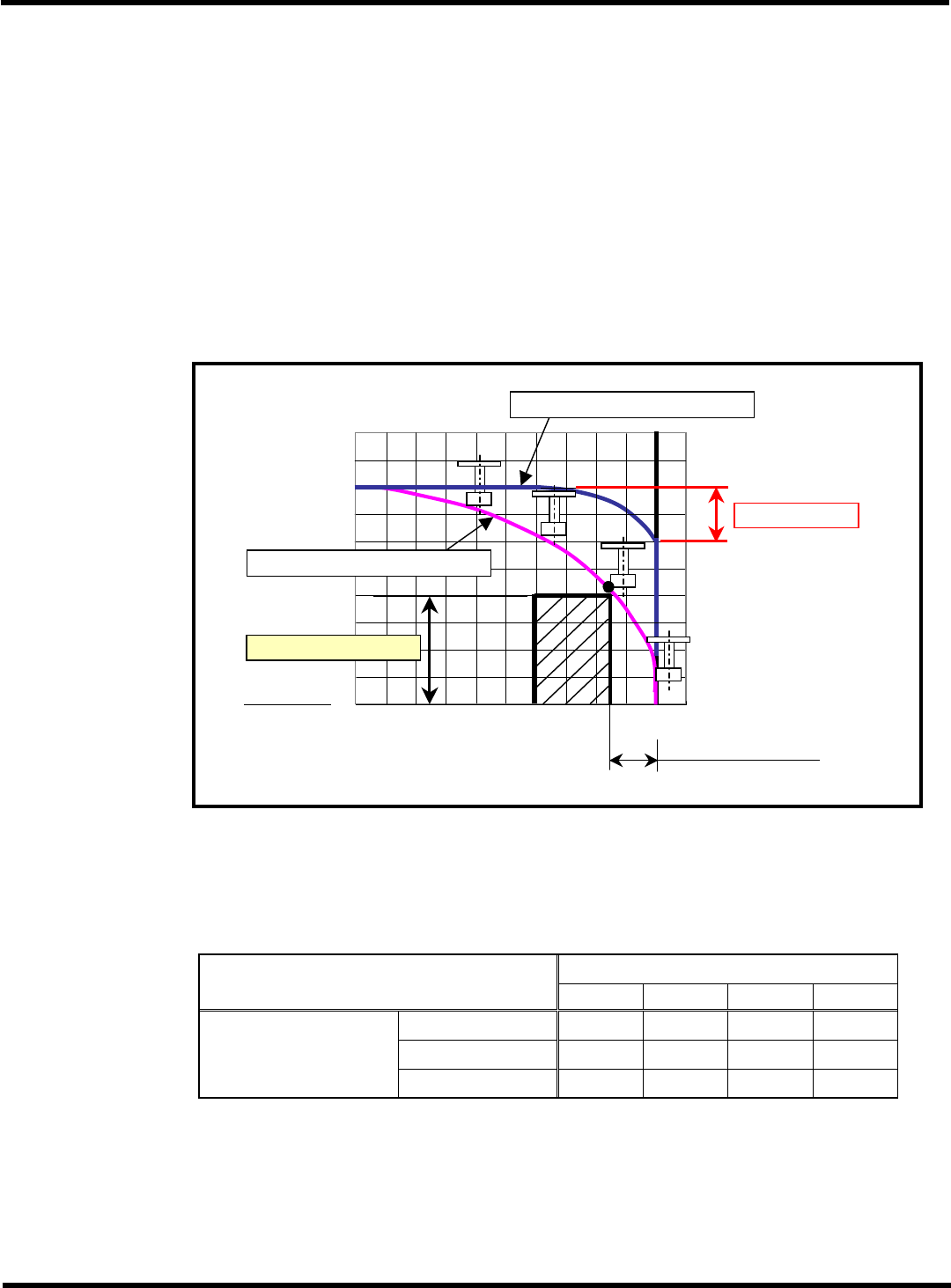
关于高部品邻接实装
如电解铝电容器等,在有厚度部品的附近实装部品时,在某些条件下稀少会发生干涉,因此设有了
干涉回避的设定。
[
功能概要
]
1. XY
轴和
Z
轴的动作将变化。下图显示有设定时及无设定时的吸嘴轨迹。
2.
可以对每工作台个别设定。
∗
执行此设定后,有些生产数据的生产率有可能下降
0 %
∼
5 %
左右。
[‘
高部品邻接实装
’
有或无时的吸嘴轨迹
]
(CM602-L: 8
吸嘴吸头时
)
[
设定的基准
]
已经将如下高度以上的部品实装完成后,并且要在该部品附近实装部品时,有可能发生干涉。
但由于
XY
轴移动方向的关系,不一定发生干涉。
邻接距离和实装后部品高度的相关表
邻接距离
(mm)
机器
(
实装速度
100 %)
0.1 0.5 1.0 2.0
8
吸嘴吸头
1.0 1.5 2.0 3.0
3
吸嘴吸头
1.5 2.0 3.0 4.0
实装后部品高度
(mm)
12
吸嘴吸头
1.0 2.0 3.0 4.0
∗
以上是实装速度为
100 %
时的条件。实装速度比
100 %
慢时,会比较安全。
∗
关于
3
吸嘴吸头,考虑到作为最坏条件的最大基板厚度时的条件。
EJM8A-C-MMC02-A01-02
V 基板上面
变位 (X, Y) (mm)
0
1
2
3
4
5
6
7
8
9
0
1
2
3
4
5
6
7
8
9
10
变位 (Z) (mm)
10
‘高部品邻接实装’ 有时 (改善)
下降量 2 mm
邻接距离 (mm)
‘高部品邻接实装’ 无时 (现状)
实装后部品高度