CM602 操作维修手册.pdf - 第269页
CM602-L 维修手册 2.1 关于机器参数 Page 2 -23 (2/2) No. 参数名 内容 4 ‘ 生产结束等待时间 [ms]’ 从前工序那里获得生产 结束信号后, 当 到设定时间即判断为生产 结束, 实装、 排出当前机器 上的基板后结束生产。 若在等待期间基板被搬 入时,将其作为最后一枚基 板。 5 ‘ 基板搬入确认时间 [ms]’ 自动运行过程中, 在已对前 工序发出要求信号时, 如果按下了暂 时停止按钮, 只 限大基板…
CM602-L
维修手册
2.1
关于机器参数
Page 2-22
(3/3)
No.
参数名
内容
22
‘
基板识别照相机灯
2
偏移量
’
为了达到与上述相同的目的,设定基板识别照相机的灯
2
的补正值。
23
‘
基板识别照相机灯
阈值偏移量
’
为了达到与上述相同的目的,设定基板识别照相机的阈值的补正值。
24
‘排出后吸嘴认识最大
芯片尺寸[mm]’
排出芯片后,设定用于吸嘴认识的最大芯片尺寸。
25
‘吸着位置示教重试阈
值[%]’
吸着位置自动示教时,如果认识结果超过芯片尺寸的吸着位置示教重试阈值
[%]
,就判定
为范围外错误并重试进行吸着位置自动示教。
将吸着位置示教重试阈值
[%]
设定为
0
时,如果认识结果超过
±
1 mm
,就判定为范围外错
误并不进行重试。
26
‘
吸着位置示教重试次
数
[
回
]’
吸着位置自动示教无法识别吸着位置时,将进行一次编带进给操作之后,再重试进行吸着位
置自动示教。在此所设定的次数进行重试。
27
‘
推迟切断编带的长度
[mm]’
在使用多功能吸头供料器预先进给功能时,推迟切断编带的时机。在此设定其极限长度。当
达到动作参数设定
‘
编带切刀长
[mm]’
+
推迟切断编带的长度
[mm]
的值时,无条件地进行
切断。
28
‘
基板弯曲示教警告值
[mm]’
设定对基板弯曲计测示教的计测测试结果判定为错误的阈值。计测结果若超过基板弯曲示教
警告判定值,则显示出错误信息。
(
仅限于有基板弯曲传感器的情况
)
在动作参数设定画面上按
[
搬送
]
,将显示的项目
(
参考画面
)
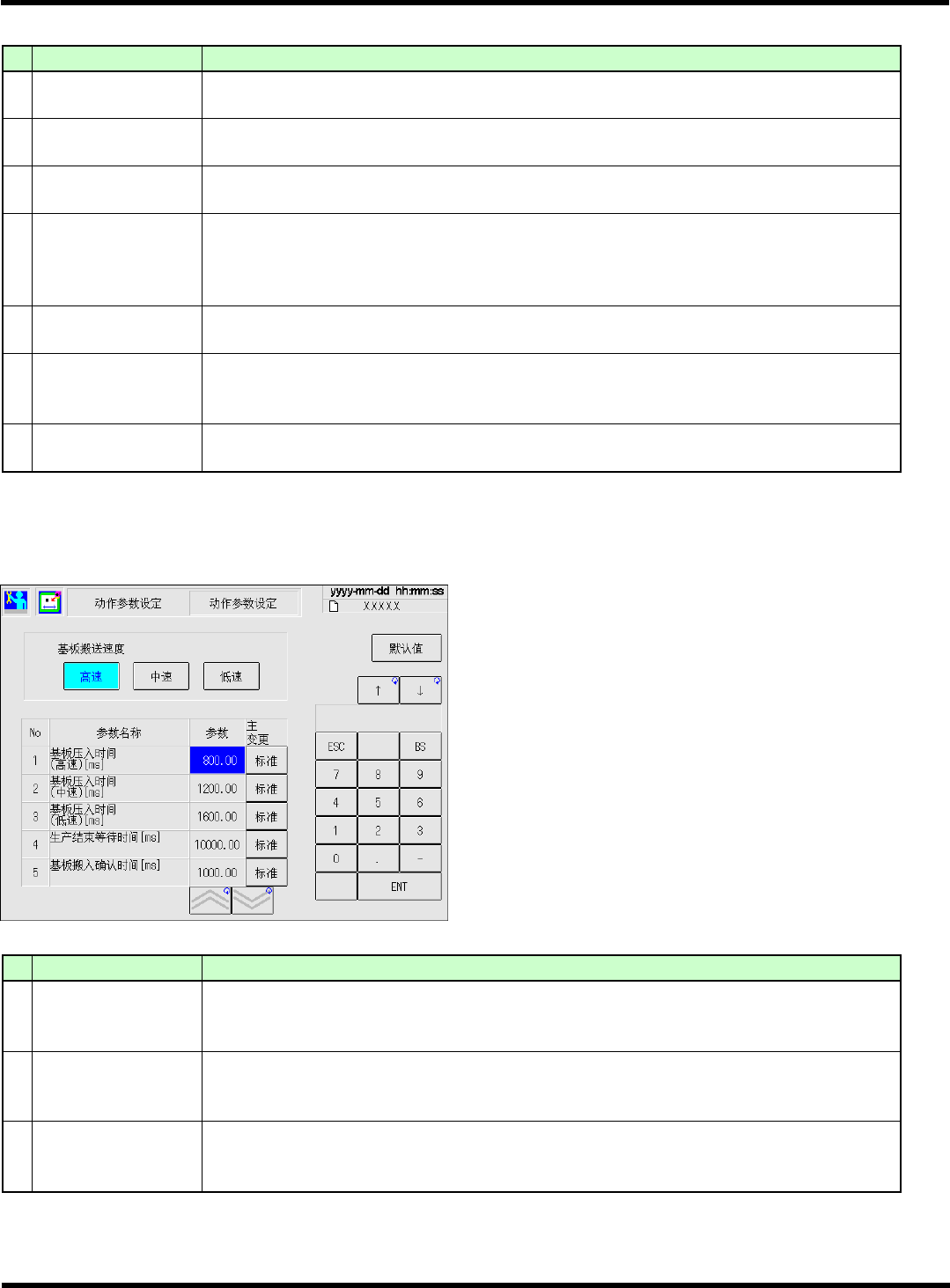
(1/2)
No.
参数名
内容
1
‘
基板压入时间
(
高速
) [ms]’
是在确定基板位置前,以高速运转传送带的时间
搬入基板,检测到减速传感器时将降低传送带的速度。
然后,当到达所设定的时间时,停止传送带的运转。
2
‘
基板压入时间
(
中速
) [ms]’
在确定基板位置前,以中速运转传送带的时间
搬入基板,检测到减速传感器时将降低传送带的速度。
然后,当到达所设定的时间时,停止传送带的运转。
3
‘
基板压入时间
(
低速
) [ms]’
在确定基板位置前,以低速运转传送带的时间
搬入基板,检测到减速传感器时将降低传送带的速度。
然后,当到达所设定的时间时,停止传送带的运转。
下一页
EJM8A-C-MMC02-A01-03
EJM4A-Mp-0003
CM602-L
维修手册
2.1
关于机器参数
Page 2-23
(2/2)
No.
参数名
内容
4
‘
生产结束等待时间
[ms]’
从前工序那里获得生产结束信号后,当到设定时间即判断为生产结束,实装、排出当前机器
上的基板后结束生产。
若在等待期间基板被搬入时,将其作为最后一枚基板。
5
‘
基板搬入确认时间
[ms]’
自动运行过程中,在已对前工序发出要求信号时,如果按下了暂时停止按钮,只限大基板的
要求信号将被切断,搬入动作也会被停止。
切断要求信号后,在设定的时间内如果没有反应顶端传感器,可以结束搬入操作动作。
6
‘
基板排出等待时间
(
要求
OFF
后
) [s]’
基板排出的动作过程为,为了排出基板,使后传送带转动之后,切换最终传感器的
ON
、
OFF
,
再等到要求信号中断后,于设定时间内停止传送带。
7
‘
基板排出等待时间
(
要求
OFF) [s]’
设定一直到基板排出时的要求信号被切断的超时时间。
8
‘
基板搬入等待时间
[s]’
设定从开始基板搬入动作起到基板进入到待机部为止的超时时间。
9
‘
排出时候
Y
夹子解除
等待时间
[ms]’
在标准的情况,排出时同时解除
Z
夹子和
Y
夹子。设定对于
Z
夹子解除动作的使
Y
夹子解
除动作等待之时间。
10
‘
基板移动等待时间
[s]’
设定在本机内基板移动时的超时时间。
11
‘
前后工序等待状态显
示灯延迟时间
[s]’
按照在此所设定的时间,使进入前后工序等待状态时的状况显示灯的亮灯时间推迟。
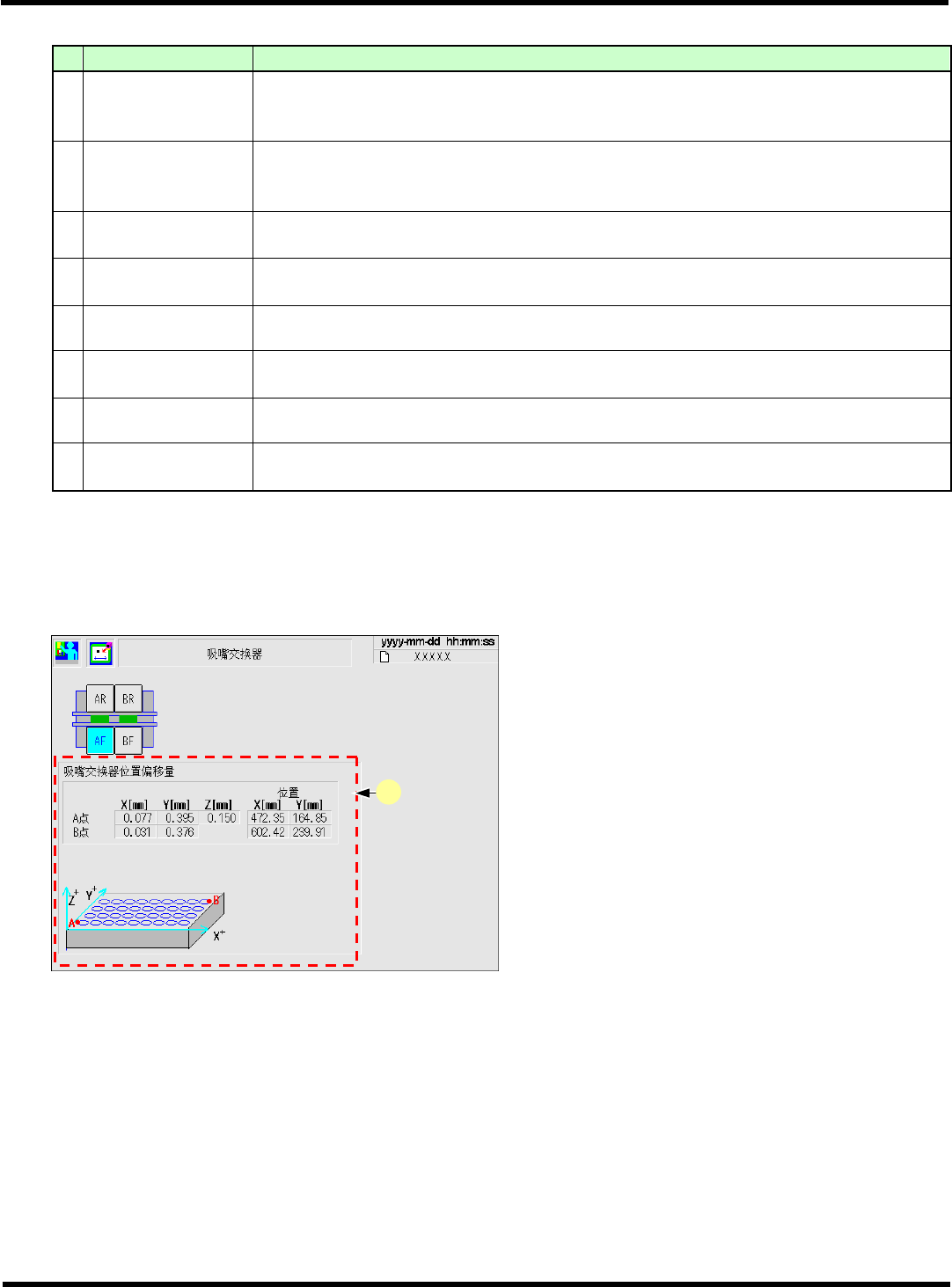
2.1.5
吸嘴交换器
a. ‘
吸嘴交换器位置偏移量
’
表示吸嘴交换器
(
对高速吸头
(12
吸嘴
)
用这为
选购件
)
的位置。
在更换吸嘴时用于移动吸头。
•
画面为高速吸头
(12
吸嘴
)
。
使用于吸嘴交换时的吸头移动。
∗
在此画面上只能设定
A
点和
B
点的
X
、
Y
、
Z
,
但是,不能变更
‘
位置
’
的
X
、
Y
。
EJM4A-Mp-0094
a
EJM8A-C-MMC02-A01-02
CM602-L
维修手册
2.1
关于机器参数
Page 2-24
2.1.6
热补正标记
a. ‘
热补正标记的偏移量
’
显示热补正标记的位置。
用于计算热补正的值。
2.1.7
实装位置
a. ‘
实装位置偏移量
’
将实装位置全部补偿偏移量时使用。
•
[
识别方式
]
使用高速吸头
(12
吸嘴
)
时
按此键,即可转换透过识别和反射识别。
可以个别设定透过识别时和反射识别时的各偏
移量。
使用通用吸头
(8
吸嘴
)
时
按此键,即将转换透过识别、反射识别、实装角
度识别。
可以个别设定透过识别时、反射识别时、实装角
度识别时的各偏移量。
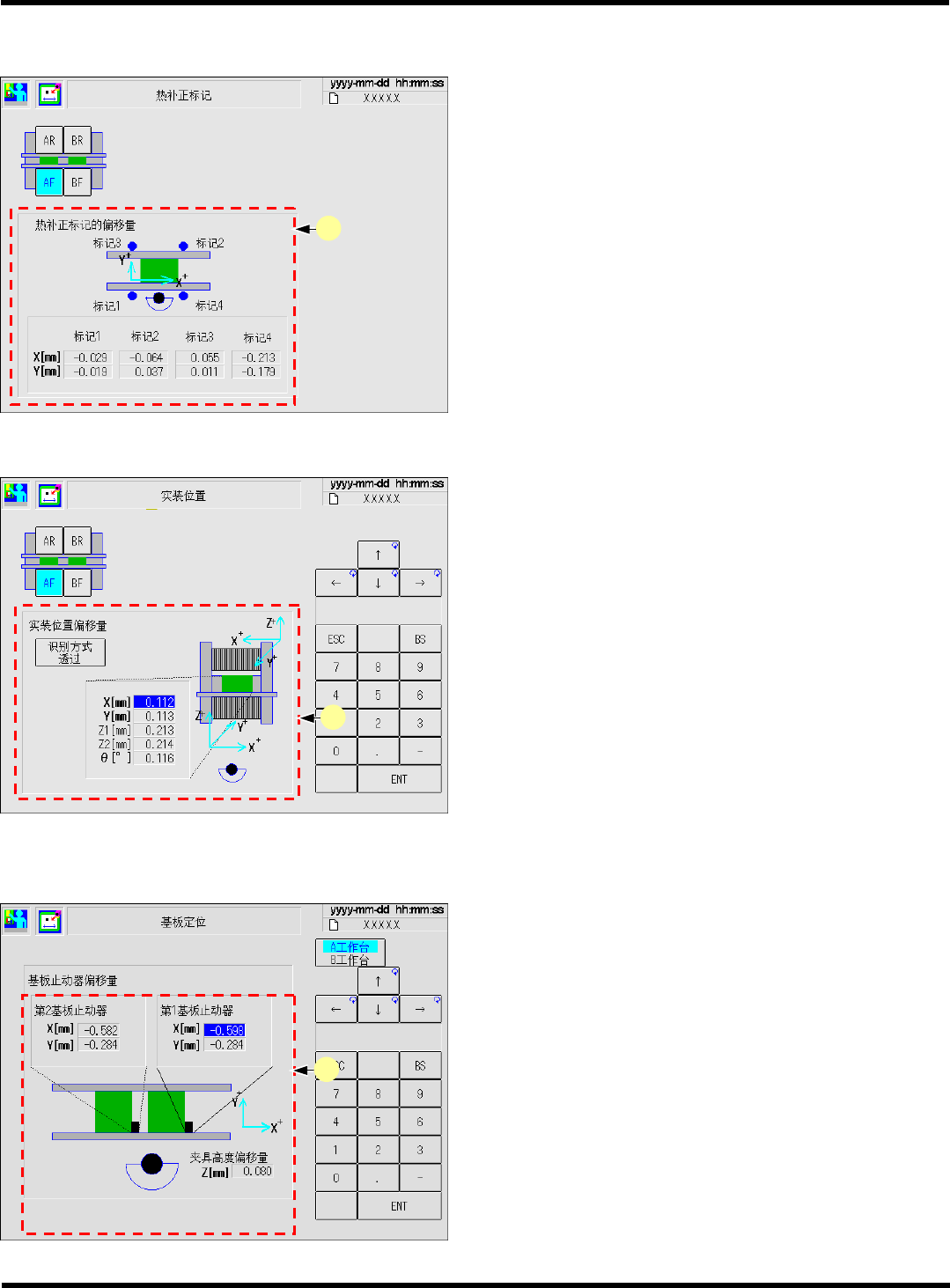
2.1.8
基板定位
a. ‘
基板止动器偏移量
’
显示基板止动器的位置。
在向基板识别位置移动时使用。
•
无论基板的大小为多少,画面上的插图不会变
化。
EJM8A-Mp-0074
a
EJM4A-C-Mp-0015
a
EJM8A-Mp-0176
a
EJM8A-C-MMC02-A01-02