FX-1R机器控制参数.pdf - 第56页
FX-1/FX-1R 机器控制参数 R e v 2 . 0 0 4-30 (3) 设置项目(线性马达) 输入范围 № 项目 最小值 最大值 单位 备考 1 伺服参数 控制参数 2 设置 0 25 参照 (5) 设置 3 放大设置 Pr .No 0100 4 回生电阻 Pr .No 0101 5 厂商设置用 Pr .No 0102 6 厂商设置用 Pr .No 0103 7 厂商设置用 Pr .No 0104 8 厂商设置用 Pr .No…
FX-1/FX-1R 机器控制参数 Rev2.00
4-29
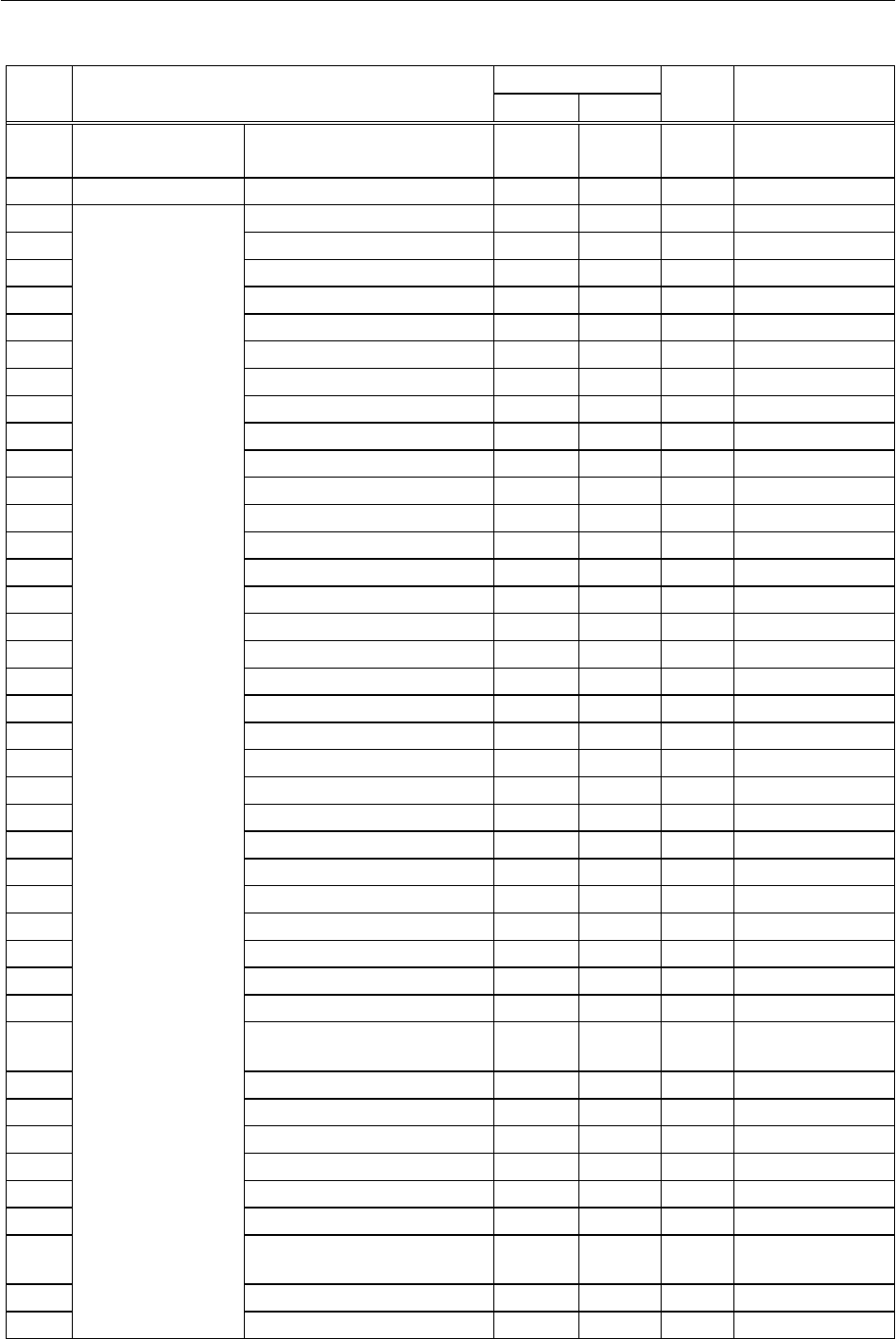
(2)设置项目(伺服马达)
输入范围
№
项目
最小值 最大值
单位 备考
1
伺服参数
控制参数
2
设置
0 25
参照(5)设置
3
AMP 设置
Pr.No 0100
4
回生电阻
Pr.No 0101
5
厂商设置用
Pr.No 0102
6
厂商设置用
Pr.No 0103
7
厂商设置用
Pr.No 0104
8
反馈脉冲数
Pr.No 0105
9
转动方向选择
Pr.No 0106
10
自动调谐
Pr.No 0107
11
伺服应答性
Pr.No 0108
12
正转转矩限制值
% Pr.No 0109
13
逆转转矩限制值
% Pr.No 010A
14
负荷惯性力矩比
倍
Pr.No 010B
15
定位控制增益1
rad/s Pr.No 010C
16
速度控制增益1
rad/s Pr.No 010D
17
定位控制增益2
rad/s Pr.No 010E
18
速度控制增益2
rad/s Pr.No 010F
19
速度积分补偿
ms Pr.No 0110
20
机械共振控制过滤器
Pr.No 0111
21
供料前进增益
% Pr.No 0112
22
负担范围
pulse Pr.No 0113
23
电磁制动序列输出
ms Pr.No 0114
24
模拟监视器输出
Pr.No 0115
25
选购功能1
Pr.No 0116
26
选购功能2
Pr.No 0117
27
低通过滤器控制
Pr.No 0118
28
厂商设置用
Pr.No 0119
29
模拟监视器1偏移
mv Pr.No 011A
30
模拟监视器2偏移
mv Pr.No 011B
31
厂商设置用
Pr.No 011C
32
零速度
r/min Pr.No 011D
33
过大误差报警等级
0.1re
v
Pr.No 011E
34
选购功能5
Pr.No 011F
35
选购功能6
Pr.No 0120
36
PI-PID 变换位置下降
pulse Pr.No 0121
37
厂商设置用
Pr.No 0122
38
速度微分补偿
Pr.No 0123
39
厂商设置用
Pr.No 0124
40
检测器输出脉冲
pulse
/rev
Pr.No 0125
41
厂商设置用
Pr.No 0126
42
参数值
禁止写入参数
Pr.No 0127
FX-1/FX-1R 机器控制参数 Rev2.00
4-30
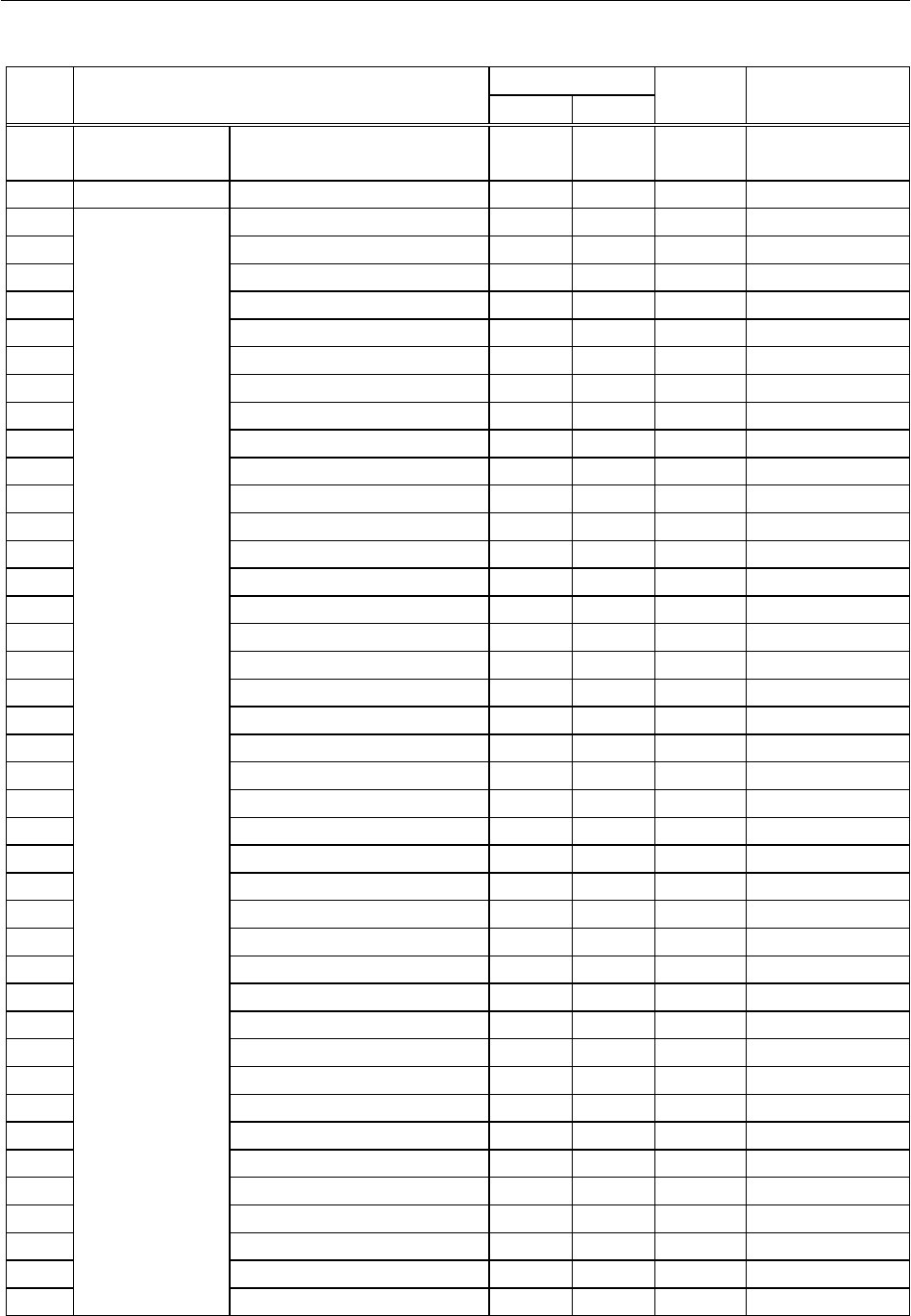
(3)设置项目(线性马达)
输入范围
№
项目
最小值 最大值
单位 备考
1
伺服参数
控制参数
2
设置
0 25
参照(5)设置
3
放大设置
Pr.No 0100
4
回生电阻
Pr.No 0101
5
厂商设置用
Pr.No 0102
6
厂商设置用
Pr.No 0103
7
厂商设置用
Pr.No 0104
8
厂商设置用
Pr.No 0105
9
选择转动方向
Pr.No 0106
10
自动调谐
Pr.No 0107
11
伺服应答性
Pr.No 0108
12
正转转矩限制值
% Pr.No 0109
13
逆转转矩限制值
% Pr.No 010A
14
负荷惯性力矩比
×0.1 倍
Pr.No 010B
15
定位控制增益1
rad/s Pr.No 010C
16
速度控制增益1
rad/s Pr.No 010D
17
定位控制增益2
rad/s Pr.No 010E
18
速度控制增益2
rad/s Pr.No 010F
19
速度积分补偿
ms Pr.No 0110
20
机械共振控制过滤器
Pr.No 0111
21
供料前进增益
% Pr.No 0112
22
负担范围
pulse Pr.No 0113
23
电磁制动序列输出
ms Pr.No 0114
24
模拟监视器输出
Pr.No 0115
25
选购功能1
Pr.No 0116
26
选购功能2
Pr.No 0117
27
低通过滤器控制
Pr.No 0118
28
厂商设置用
Pr.No 0119
29
模拟监视器1偏移
mv Pr.No 011A
30
模拟监视器2偏移
mv Pr.No 011B
31
厂商设置用
Pr.No 011C
32
零速度
mm/s Pr.No 011D
33
过大误差报警等级
Pr.No 011E
34
选购功能5
Pr.No 011F
35
通讯速率选择
Pr.No 0120
36
PI-PID 变换位置下降
pulse Pr.No 0121
37
厂商设置用
Pr.No 0122
38
速度微分补偿
Pr.No 0123
39
厂商设置用
Pr.No 0124
40
检测器输出脉冲
Pr.No 0125
41
厂商设置用
Pr.No 0126
42
参数值
禁止写入参数
Pr.No 0127
FX-1/FX-1R 机器控制参数 Rev2.00
4-31
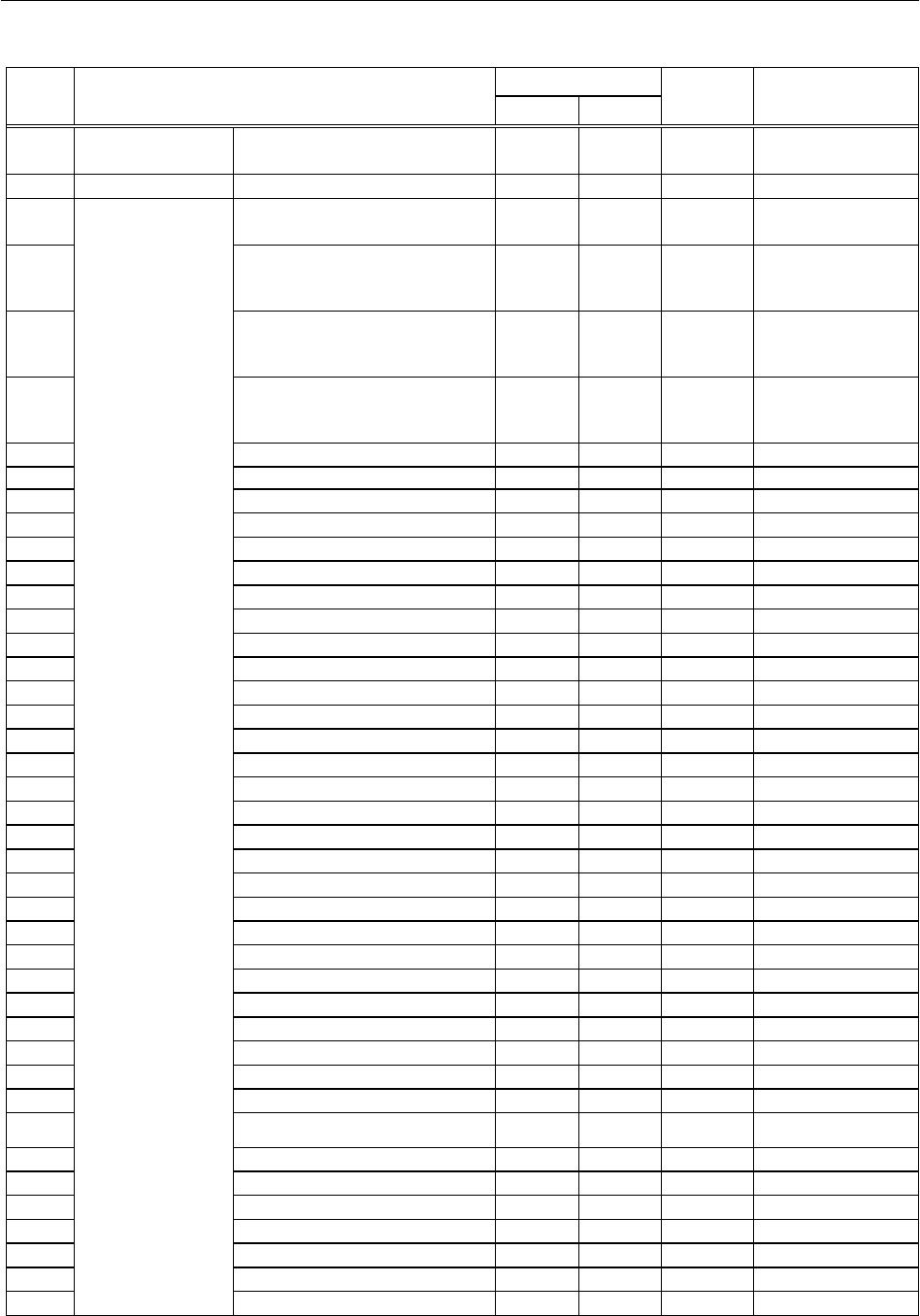
(4)设置项目(步进马达)
输入范围
№
项目
最小值 最大值
单位 备考
1
伺服参数
控制参数
2
设置
0 25
参照(5)设置
3
防止脱出检测三角驱动的自动
电流降设置
Pr.No 0100
4
动作时电流
0.04A
Pr.No 0101
中心马达的单位为
0.02A
5
停止时电流
0.04A
Pr.No 0102
中心马达的单位为
0.02A
6
加减速时电流
0.04A
Pr.No 0103
中心马达的单位为
0.02A
7
电流降时间
ms Pr.No 0104
8 - Pr.No 0105
9
转动方向选择
Pr.No 0106
10
-
Pr.No 0107
11
脱出检测宽度
Pr.No 0108
12
-
Pr.No 0109
13
PLG 脉冲数
ppr Pr.No 010A
14
-
Pr.No 010B
15
原点恢复选项1
Pr.No 010C
16
-
Pr.No 010D
17
-
Pr.No 010E
18
NEARORG 传感器理论设置
Pr.No 010F
19
-
Pr.No 0110
20
-
Pr.No 0111
21
-
Pr.No 0112
22
-
Pr.No 0113
23
-
Pr.No 0114
24
-
Pr.No 0115
25
-
Pr.No 0116
26
自动反作用力伺服设置
Pr.No 0117
27
1次推迟过滤器设置(下位)
ms Pr.No 0118
28
1次推迟过滤器设置(上位)
ms Pr.No 0119
29
负担范围设置
pulse Pr.No 011A
30
-
Pr.No 011B
31
振动抑制值1(下位)
Pr.No 011C
32
振动抑制值1(上位)
Pr.No 011D
33
振动抑制值2(下位)
Pr.No 011E
34
振动抑制值2(上位)
Pr.No 011F
35
-
Pr.No 0120
36
-
Pr.No 0121
37
-
Pr.No 0122
38
-
Pr.No 0123
39
-
Pr.No 0124
40
-
Pr.No 0125
41
-
Pr.No 0126
42
参数值
-
Pr.No 0127
(5)
设置