00197332-01_UM_D1i_D2i_SR605_FR.pdf - 第126页
3 Caractéristiques techniques de l'automat e Manuel d'utilisa tion SIPLACE D1i/D2i 3.7 Système de portiques A partir de la version du logiciel SR.605.03 SP2 Edition 10/2012 FR 126 3.7.3 Caractéristiques t echni…
Manuel d'utilisation SIPLACE D1i/D2i 3 Caractéristiques techniques de l'automate
A partir de la version du logiciel SR.605.03 SP2 Edition 10/2012 FR 3.7 Système de portiques
125
3.7.2 Structure de l'axe X
3
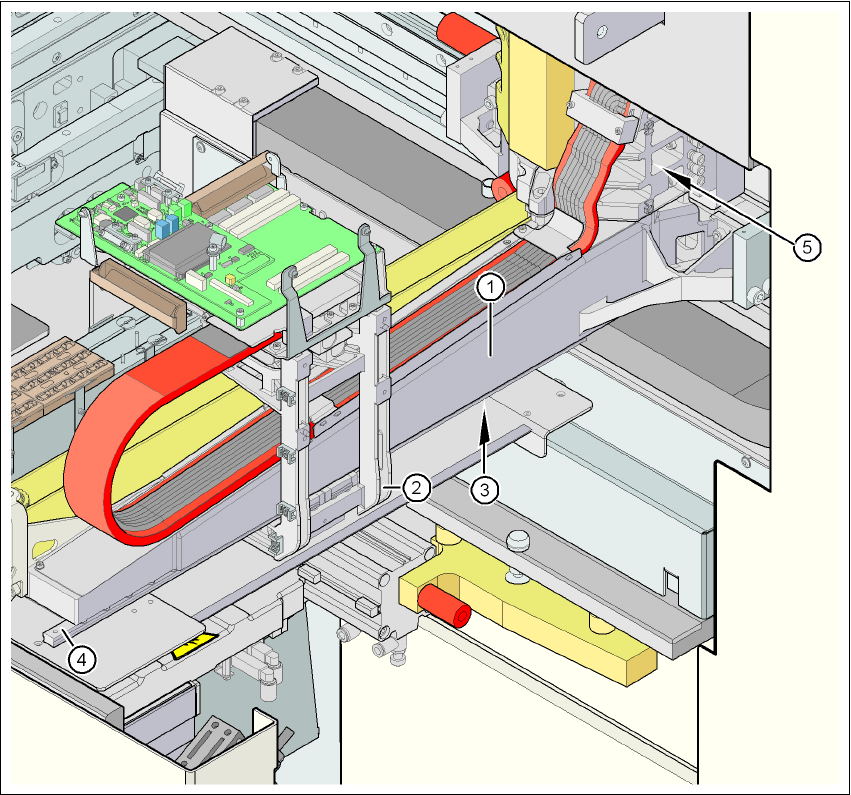
Fig. 3.7 - 2 Structure de l'axe X
L'axe X se compose pour l'essentiel des blocs principaux suivants:
– Console du portique (1)
– Fixation de la tête (2)
– Système de mesure linéaire (3)
– Système de guidage de l'axe X (4)
– Servomoteur courant triphasé X (5)
La fixation de la tête comporte les composants suivants:
– Caméra sous le portique (caméra CI du module de vision CIs)
– Platine de la tête
– Tête de mesure du système de mesure de l'axe X
– Tête de collecte & de placement (SIPLACE D2i)
– Tête de collecte & de placement et tête de prélèvement & de placement (SIPLACE D1i)
3 Caractéristiques techniques de l'automate Manuel d'utilisation SIPLACE D1i/D2i
3.7 Système de portiques A partir de la version du logiciel SR.605.03 SP2 Edition 10/2012 FR
126
3.7.3 Caractéristiques techniques de l'axe X
3
3.7.4 Structure de l'axe Y
3
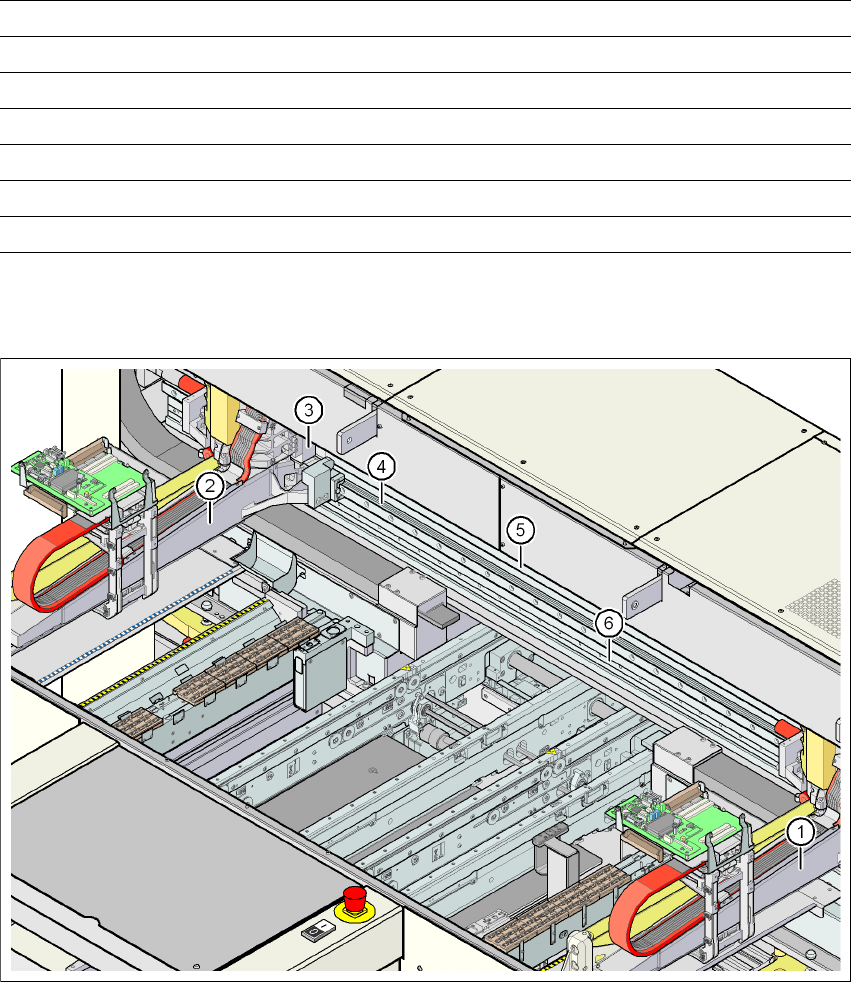
Fig. 3.7 - 3 Structure de l'axe Y à l'instar de l'automate D2i
Commande Servomoteur courant triphasé / courroies dentées
Vitesse max. 2,5 m/s
Trajectoire de déplacement 470 mm
Système de mesure de la trajectoire Echelle métallique linéaire
Longueur de mesure 520 mm
Longueur de l'échelle 520 mm
Résolution 1 m
(1) Portique 1 (SIPLACE D1i / D2i) (4) Système de guidage
(2) Portique 2 (SIPLACE D2i) (5) Aimant permanent
(3) Plaque d'adaptation (6) Système de mesure
Manuel d'utilisation SIPLACE D1i/D2i 3 Caractéristiques techniques de l'automate
A partir de la version du logiciel SR.605.03 SP2 Edition 10/2012 FR 3.7 Système de portiques
127
L'axe Y se compose pour l'essentiel des blocs principaux suivants:
– Commande linéaire Y avec aimant permanent (pos. 5 dans la Fig. 3.7 - 3
, page 126) et pla-
que d'adaptation (pos. 3 dans la Fig. 3.7 - 3
, page 126)
– Système de guidage Y (pos. 4 dans la Fig. 3.7 - 3
, page 126)
– Système de mesure Y (pos. 6 dans la Fig. 3.7 - 3
, page 126)
L'axe Y est entraîné par un moteur linéaire. La partie secondaire de la commande se compose
d'aimants permanents et est montée sur le montant de la machine. La partie principale est vissée
avec le portique (plaque d'adaptation). Un montage anticrash limite les trajectoires de déplace-
ment des portiques l'un envers l'autre.
3.7.5 Caractéristiques techniques de l'axe Y
Commande Moteur linéaire, direct
Vitesse Max. 2,5 m/s
Trajectoire de déplacement du portique, SIPLACE D1i
Portique 1: du centre de la machine jusqu'à l'emplacement 1
Portique 1: du centre de la machine jusqu'à l'emplacement 2
+ 778 mm
- 801 mm
Trajectoire de déplacement du portique, SIPLACE D2i
Portique 1: du centre de la machine jusqu'à l'emplacement 1
Portique 2: du centre de la machine jusqu'à l'emplacement 2
+ 795 mm
+ 677 mm
Système de mesure de la trajectoire Echelle métallique linéaire
Longueur de l'échelle 1950 mm
Résolution 1 m