GXH 工程说明书 SM-0134-005.pdf - 第132页
装置名称 装置名称 装置名称 装置名称 贴片机 贴片机 贴片机 贴片机 模块名称 模块名称 模块名称 模块名称 第 第 第 第 七 七 七 七 章 章 章 章 搬送部 搬送部 搬送部 搬送部 页次 页次 页次 页次 7-3 单元名称 单元名称 单元名称 单元名称 修订 修订 修订 修订 0412-001 型号名称 型号名称 型号名称 型号名称 项 项 项 项 目 目 目 目 1 1 1 1 . . . . 搬 搬 搬 搬 送 送 送 送…
装置名称
装置名称装置名称
装置名称
贴片机
贴片机贴片机
贴片机
模块名称
模块名称模块名称
模块名称
第
第第
第七
七七
七章
章章
章
搬送部
搬送部搬送部
搬送部
页次
页次页次
页次
7-2
单元名称
单元名称单元名称
单元名称
修订
修订修订
修订
0412-001
型号名称
型号名称型号名称
型号名称
项
项项
项
目
目目
目
1
11
1.
. .
. 搬
搬搬
搬送
送送
送马达的更换
马达的更换马达的更换
马达的更换
GXH-1
1.3
1.31.3
1.3
NR
NRNR
NR NL
NLNL
NL 部对准宽度马达的更换
部对准宽度马达的更换部对准宽度马达的更换
部对准宽度马达的更换
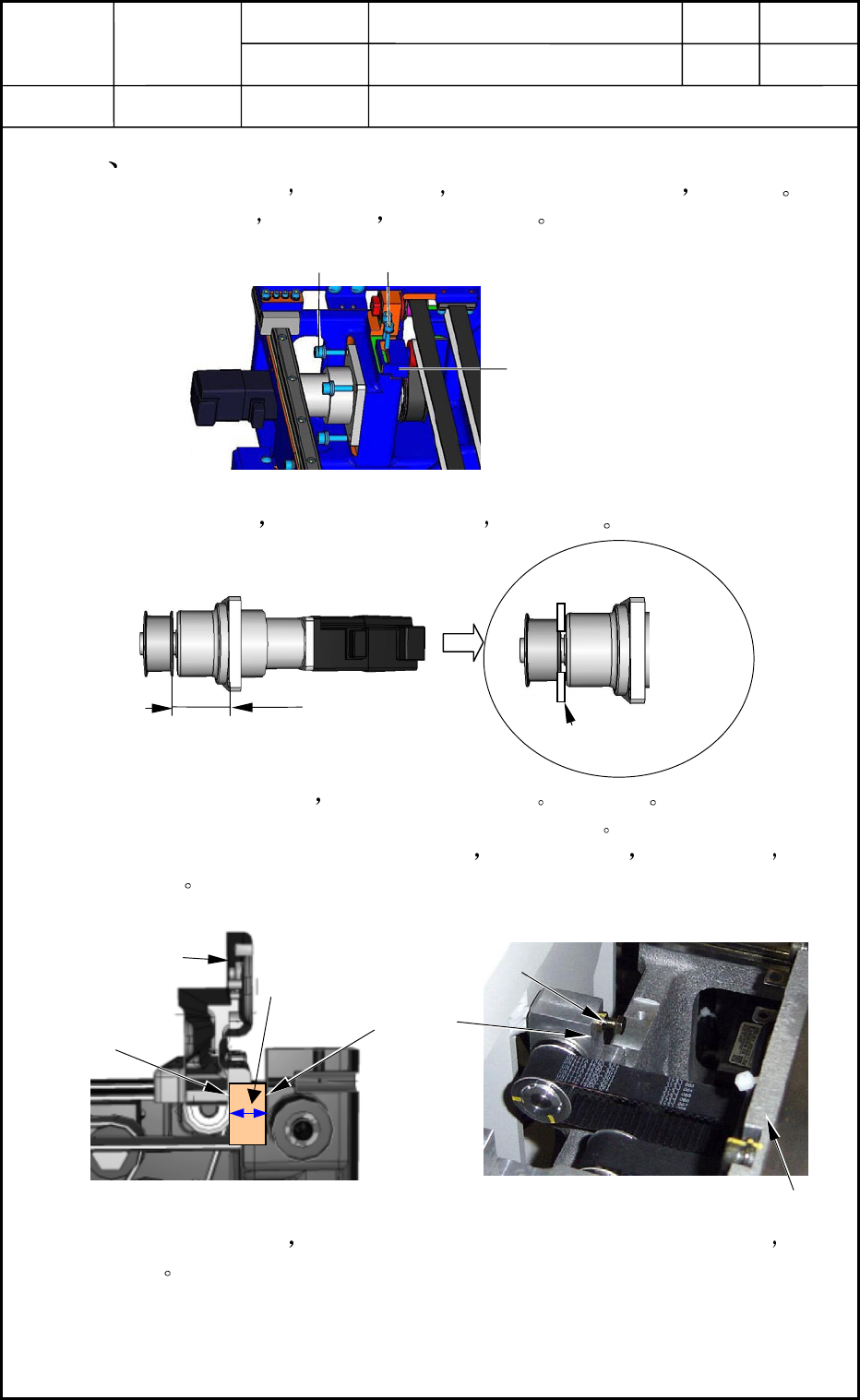
(1) 拔掉马达的连接器 如 Fig.G5 所示 拧松螺栓 A 后移动模块 A 拧松带子
(2) 如 Fig.G5 所示
拆卸螺栓 B 再拆卸马达单元
(3) 如 Fig.G6 所示
在新马达贴装机械锁定 安装到主机
(4) 移动 Fig.G5 的模块 A
进行带子的张紧力调整 (使用虎钳 )
详细内容请参照“第三章 3.各种带子的张紧力设定值”
(5) 马达为 C 相状态时(使用 C 相测量治具)
如 Fig.G7 所示 决定滑道位置 拧紧机
械锁定
拧紧扭矩
拧紧扭矩拧紧扭矩
拧紧扭矩 : 392
: 392 : 392
: 392 N(40
N(40N(40
N(40 kgf
kgfkgf
kgf·cm)
cm)cm)
cm)
(6) 进行传感器的调整
同样在 Fig.G7 的位置使滑道的越界传感器刚好遮光 便结束
作业
模块
模块模块
模块 A
AA
A
螺栓
螺栓螺栓
螺栓 B
BB
B
螺栓
螺栓螺栓
螺栓 A
AA
A
Fig.G5
Fig.G5Fig.G5
Fig.G5
对准宽度马达
对准宽度马达对准宽度马达
对准宽度马达
37.8
37.837.8
37.8 mm
mmmm
mm
间隙量规
间隙量规间隙量规
间隙量规(3
(3(3
(3mm)
mm)mm)
mm)
Fig.G6
Fig.G6Fig.G6
Fig.G6
机械锁定
机械锁定机械锁定
机械锁定
模块表
模块表模块表
模块表
13.5
13.513.5
13.5mm
mmmm
mm
Fig.G7
Fig.G7Fig.G7
Fig.G7
滑道的基准位置设定
滑道的基准位置设定滑道的基准位置设定
滑道的基准位置设定
制动阀安装面
制动阀安装面制动阀安装面
制动阀安装面
制动阀工作面
制动阀工作面制动阀工作面
制动阀工作面
滑道
滑道滑道
滑道
滑道
滑道滑道
滑道
制动阀
制动阀制动阀
制动阀
Fig.G8
Fig.G8Fig.G8
Fig.G8
装置名称
装置名称装置名称
装置名称
贴片机
贴片机贴片机
贴片机
模块名称
模块名称模块名称
模块名称
第
第第
第七
七七
七章
章章
章
搬送部
搬送部搬送部
搬送部
页次
页次页次
页次
7-3
单元名称
单元名称单元名称
单元名称
修订
修订修订
修订
0412-001
型号名称
型号名称型号名称
型号名称
项
项项
项
目
目目
目
1
11
1.
. .
. 搬
搬搬
搬送
送送
送马达的更换
马达的更换马达的更换
马达的更换
GXH-1
1.4
1.41.4
1.4
NB
NBNB
NB 滑道对准宽度马达的更换
滑道对准宽度马达的更换滑道对准宽度马达的更换
滑道对准宽度马达的更换
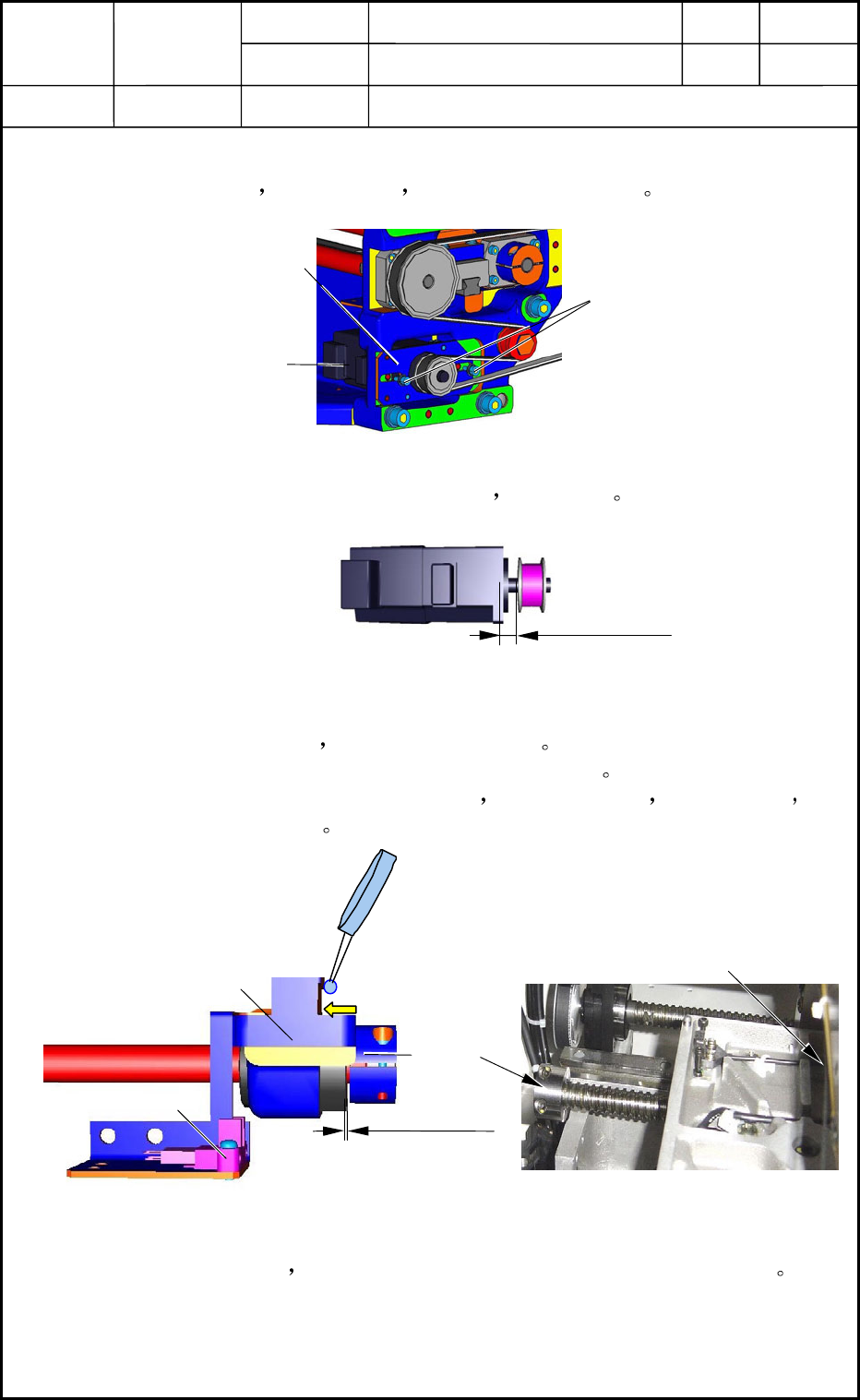
(1) 如 Fig.G9 所示 拆卸固定螺栓 从主机拆卸金属板和马达
(2) 用 Fig.G10 的尺寸在新马达上贴装传动轮
安装到主机
(3) 移动 Fig.G9 的金属板
进行带子的张紧力调整
详细内容请参照“第三章 3.各种带子的张紧力设定值”
(4) 马达为 C 相状态时(使用 C 相测量治具)
如 Fig.G11 所示 决定滑道位置 拧紧
Fig.G10 马达的传动轮
(5) 进行传感器的调整
同样在 Fig.G11 的位置使滑道的越界传感器刚好遮光
Fig.G9
Fig.G9Fig.G9
Fig.G9
NB
NBNB
NB 滑道部
滑道部滑道部
滑道部
金属板
金属板金属板
金属板
固定螺栓
固定螺栓固定螺栓
固定螺栓
马达
马达马达
马达
1.0
1.01.0
1.0±
±±
±0.2mm
0.2mm0.2mm
0.2mm
离机械制动阀
离机械制动阀离机械制动阀
离机械制动阀
1.0
1.01.0
1.0±
±±
±0.2
0.20.2
0.2 mm
mmmm
mm
越界传感器
越界传感器越界传感器
越界传感器
滑道
滑道滑道
滑道
机械制动阀
机械制动阀机械制动阀
机械制动阀
Fig.G11
Fig.G11 Fig.G11
Fig.G11 滑道定位
滑道定位滑道定位
滑道定位
滑道
滑道滑道
滑道
Fig.G12
Fig.G12Fig.G12
Fig.G12
Fig.G10
Fig.G10Fig.G10
Fig.G10
尺寸关系
尺寸关系尺寸关系
尺寸关系
8.0
8.08.0
8.0±
±±
±0.3mm
0.3mm0.3mm
0.3mm
装置名称
装置名称装置名称
装置名称
贴片机
贴片机贴片机
贴片机
模块名称
模块名称模块名称
模块名称
第
第第
第七
七七
七章
章章
章
搬送部
搬送部搬送部
搬送部
页次
页次页次
页次
7-4
单元名称
单元名称单元名称
单元名称
修订
修订修订
修订
0412-001
型号名称
型号名称型号名称
型号名称
项
项项
项
目
目目
目
2
22
2.
. .
. 搬送
搬送搬送
搬送带
带带
带的更换
的更换的更换
的更换
GXH-1
2.1
2.12.1
2.1
搬送带的更换
搬送带的更换搬送带的更换
搬送带的更换
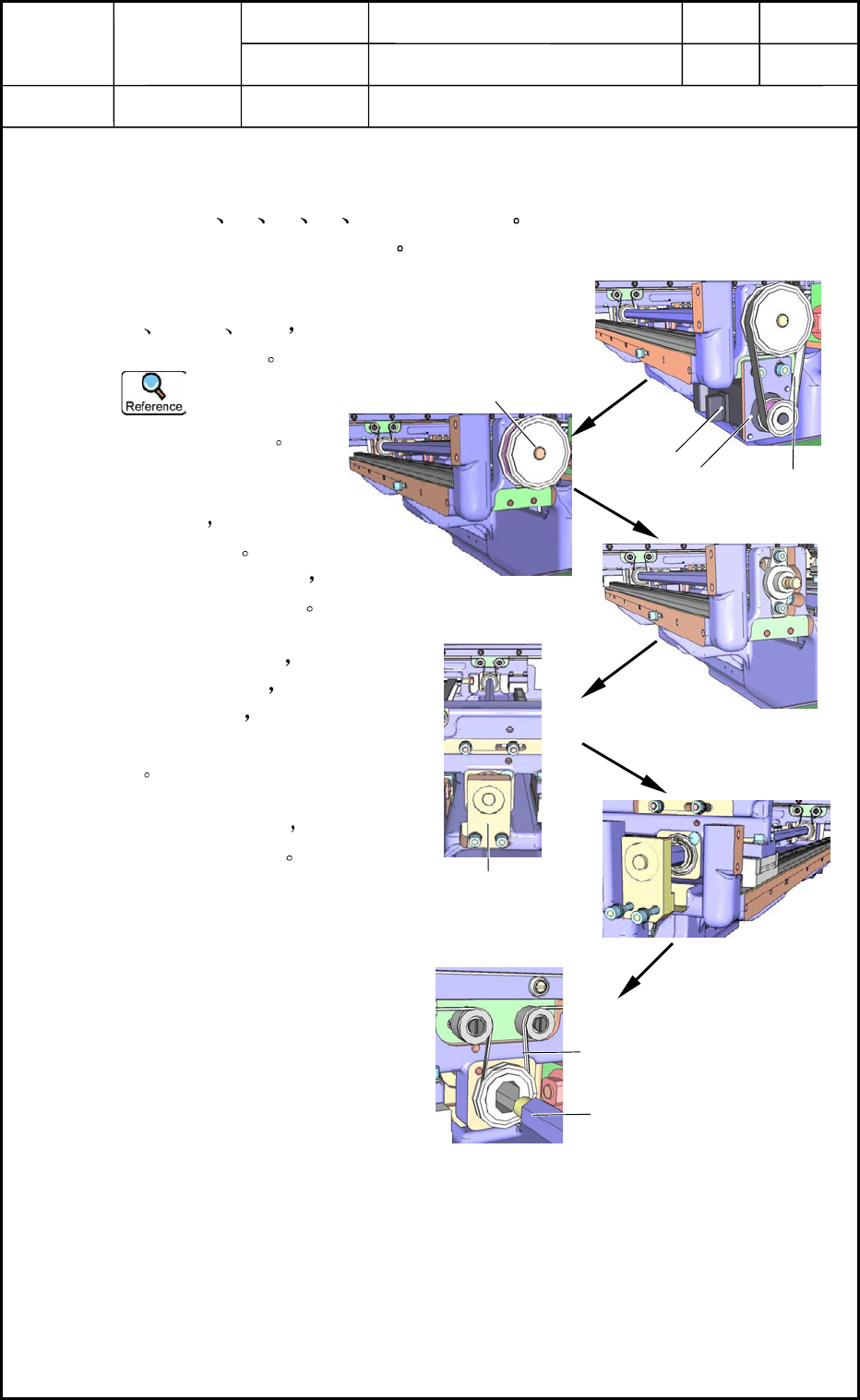
• 本装置有
本装置有本装置有
本装置有 NR
NRNR
NR NL
NLNL
NL NA
NANA
NA NB
NBNB
NB NC
NCNC
NC 部
部部
部 5
55
5 套搬送带
套搬送带套搬送带
套搬送带
更换带子基本上按同
更换带子基本上按同更换带子基本上按同
更换带子基本上按同样
样样
样步骤进行
步骤进行步骤进行
步骤进行
(1) 拆卸 Fig.G13 的搬送马
达
金属板 带子 成
为 Fig.G14 状态
详细内容请参
照“1.搬送马达
的更换”
(2) Fig.G14 中拆卸控制杆
的传动轮
成为
Fig.G15 状态
拧松 2 个固定螺丝钉
拉到前侧拆卸传动轮
(3) 在相反侧 Fig.G16
拧
松模块 A 的螺栓
如
Fig.G17 所示
将模
块 A 和控 制杆拉到前
侧
(4) 在 Fig.G18 状态下
进
行带子的更换作业
Fig.G13
Fig.G13Fig.G13
Fig.G13
Fig.G14
Fig.G14Fig.G14
Fig.G14
Fig.G15
Fig.G15Fig.G15
Fig.G15
Fig.G16
Fig.G16Fig.G16
Fig.G16
Fig.G17
Fig.G17Fig.G17
Fig.G17
Fig.G18
Fig.G18Fig.G18
Fig.G18
马达
马达马达
马达
带子
带子带子
带子
金
属板
金
属板
金
属板
金
属板
控制杆的传动轮
控制杆的传动轮控制杆的传动轮
控制杆的传动轮
模块
模块模块
模块 A
AA
A
控制杆
控制杆控制杆
控制杆
搬送带
搬送带搬送带
搬送带