GXH 工程说明书 SM-0134-005.pdf - 第257页
装置名称 装置名称 装置名称 装置名称 贴片机 贴片机 贴片机 贴片机 模块名称 模块名称 模块名称 模块名称 第十七章 第十七章 第十七章 第十七章 伺服警告 伺服警告 伺服警告 伺服警告 页次 页次 页次 页次 17-30 单元名称 单元名称 单元名称 单元名称 修订 修订 修订 修订 0509-001 型号名称 型号名称 型号名称 型号名称 项 项 项 项 目 目 目 目 1 . 1 . 1 . 1 . 伺服警告的问题处理 伺服警…
装置名称
装置名称装置名称
装置名称
贴片机
贴片机贴片机
贴片机
模块名称
模块名称模块名称
模块名称
第十七章
第十七章第十七章
第十七章
伺服警告
伺服警告伺服警告
伺服警告
页次
页次页次
页次
17-29
单元名称
单元名称单元名称
单元名称
修订
修订修订
修订
0509-001
型号名称
型号名称型号名称
型号名称
项
项项
项
目
目目
目
1.
1. 1.
1. 伺服警告的问题处理
伺服警告的问题处理伺服警告的问题处理
伺服警告的问题处理
GXH-1
警告
警告警告
警告
代码
代码代码
代码
伺服警告内容
伺服警告内容伺服警告内容
伺服警告内容
原因
原因原因
原因及
及及
及复
复复
复位
位位
位方法
方法方法
方法
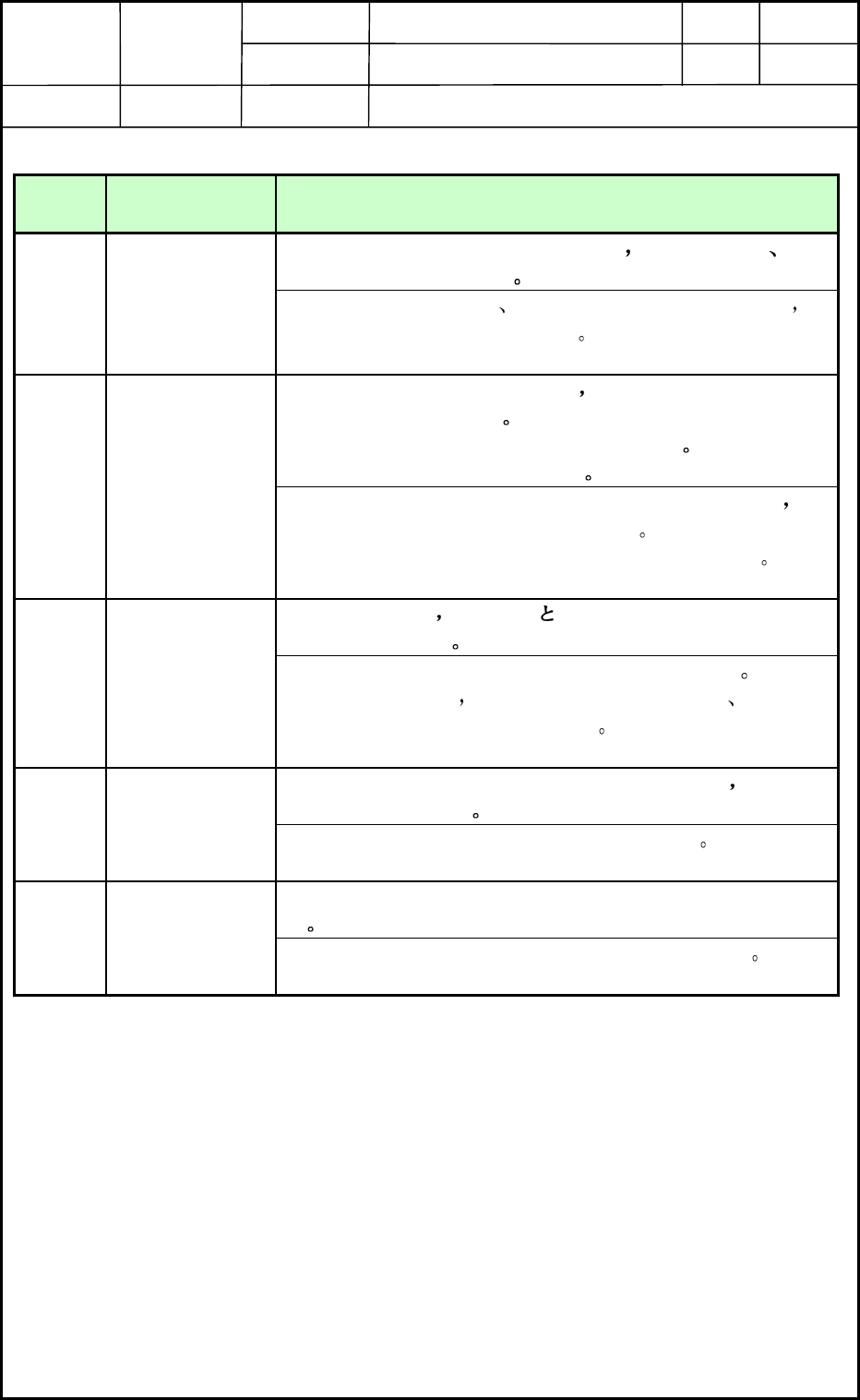
在并列驱动
在并列驱动在并列驱动
在并列驱动轴的
轴的轴的
轴的非同期微调整模式中
非同期微调整模式中非同期微调整模式中
非同期微调整模式中 进行原
进行原进行原
进行原点
点点
点复
复复
复位
位位
位 自动
自动自动
自动
运行及直线间隔补位运行
运行及直线间隔补位运行运行及直线间隔补位运行
运行及直线间隔补位运行
51
5151
51
并列驱动非同期
并列驱动非同期并列驱动非同期
并列驱动非同期
模式中
模式中模式中
模式中
(复位方法) 原点复位
自动运行及直线间隔补位运行 请
在同期模式中进行
(1)
(1)(1)
(1)在于并列驱动
在于并列驱动在于并列驱动
在于并列驱动轴的
轴的轴的
轴的原点
原点原点
原点复
复复
复位
位位
位 选择
选择选择
选择标尺原点信号检出式
标尺原点信号检出式标尺原点信号检出式
标尺原点信号检出式
以外的原点
以外的原点以外的原点
以外的原点复
复复
复位
位位
位方法
方法方法
方法
(2)
(2)(2)
(2)没有设定与并列驱动
没有设定与并列驱动没有设定与并列驱动
没有设定与并列驱动轴
轴轴
轴组编号对称的
组编号对称的组编号对称的
组编号对称的轴
轴轴
轴
并且设定有
并且设定有并且设定有
并且设定有 3
33
3
轴
轴轴
轴以上的相同并列驱动组编号
以上的相同并列驱动组编号以上的相同并列驱动组编号
以上的相同并列驱动组编号
52
5252
52
并列驱动轴设定
并列驱动轴设定并列驱动轴设定
并列驱动轴设定
出错
出错出错
出错
(复位方法 1) 请在原点复位选项 1 的原点复位方法中
设
定左记的原点复位方法
(复位方法 2) 请务必设定并列驱动轴组编号为对称
在于并列驱动
在于并列驱动在于并列驱动
在于并列驱动轴
轴轴
轴 标准
标准标准
标准轴和
轴和轴和
轴和 辅助轴
辅助轴辅助轴
辅助轴的偏差超
的偏差超的偏差超
的偏差超过参数的
过参数的过参数的
过参数的并列
并列并列
并列
驱动偏差过大宽度
驱动偏差过大宽度驱动偏差过大宽度
驱动偏差过大宽度
53
5353
53
并列驱动
并列驱动并列驱动
并列驱动偏差过
偏差过偏差过
偏差过
大
大大
大
(复位方法) 请调整为标准轴和辅助轴的偏差变小
另外
请进行参数的偏差过大宽度 偏差过大
检出开始迟延的修正
并列驱动同期模式中的伺服
并列驱动同期模式中的伺服并列驱动同期模式中的伺服
并列驱动同期模式中的伺服 ON
ONON
ON 时的误差修正时
时的误差修正时时的误差修正时
时的误差修正时 偏差超过
偏差超过偏差超过
偏差超过
参数的同期有效幅度
参数的同期有效幅度参数的同期有效幅度
参数的同期有效幅度
54
5454
54
并列驱动同期有
并列驱动同期有并列驱动同期有
并列驱动同期有
效幅度不正确
效幅度不正确效幅度不正确
效幅度不正确
(复位方法) 请进行参数同期有效幅度的修正
并列驱动同期模式中的伺服
并列驱动同期模式中的伺服并列驱动同期模式中的伺服
并列驱动同期模式中的伺服 ON
ONON
ON 时的误差修正中进行运行启
时的误差修正中进行运行启时的误差修正中进行运行启
时的误差修正中进行运行启
动
动动
动
55
5555
55
并列驱动同期对
并列驱动同期对并列驱动同期对
并列驱动同期对
齐中
齐中齐中
齐中
(复位方法) 请勿在同期对齐信号为 ON 时进行启动
装置名称
装置名称装置名称
装置名称
贴片机
贴片机贴片机
贴片机
模块名称
模块名称模块名称
模块名称
第十七章
第十七章第十七章
第十七章
伺服警告
伺服警告伺服警告
伺服警告
页次
页次页次
页次
17-30
单元名称
单元名称单元名称
单元名称
修订
修订修订
修订
0509-001
型号名称
型号名称型号名称
型号名称
项
项项
项
目
目目
目
1.
1. 1.
1. 伺服警告的问题处理
伺服警告的问题处理伺服警告的问题处理
伺服警告的问题处理
GXH-1
警告
警告警告
警告
代码
代码代码
代码
伺服警告内容
伺服警告内容伺服警告内容
伺服警告内容
原因
原因原因
原因及
及及
及复
复复
复位
位位
位方法
方法方法
方法
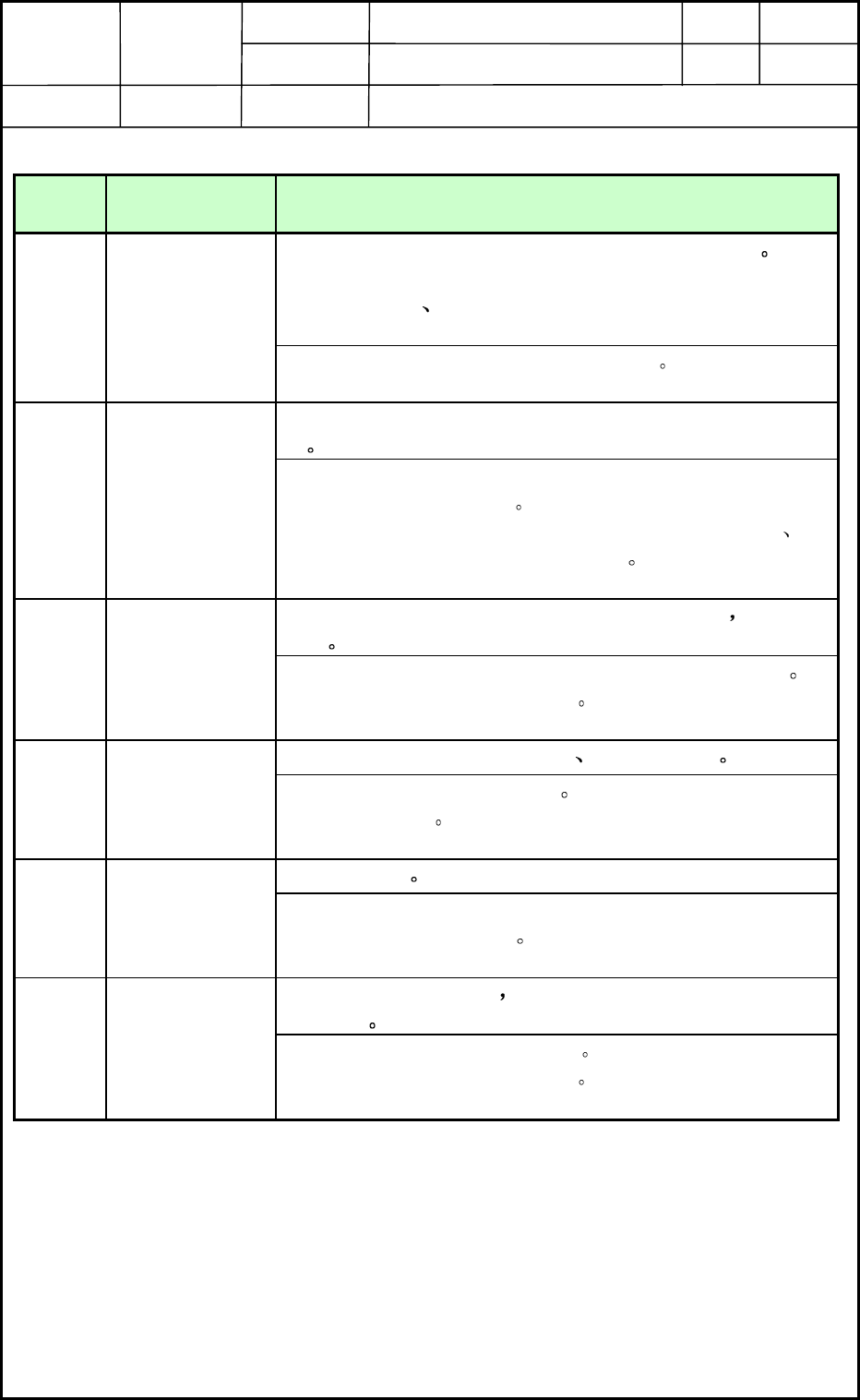
并列
并列并列
并列驱动
驱动驱动
驱动同期模式中的运行中辅助
同期模式中的运行中辅助同期模式中的运行中辅助
同期模式中的运行中辅助轴侧发生下记
轴侧发生下记轴侧发生下记
轴侧发生下记异常
异常异常
异常
(1)
(1)(1)
(1)
伺服警告
伺服警告伺服警告
伺服警告
(2)
(2)(2)
(2)
伺服关闭
伺服关闭伺服关闭
伺服关闭
就绪关闭
就绪关闭就绪关闭
就绪关闭(
((
(包括非常停止
包括非常停止包括非常停止
包括非常停止)
))
)
(3)
(3)(3)
(3)
通信异常
通信异常通信异常
通信异常或
或或
或电
电电
电源
源源
源断开
断开断开
断开
56
5656
56
并列
并列并列
并列驱动
驱动驱动
驱动辅助
辅助辅助
辅助轴
轴轴
轴
异常
异常异常
异常
(复位方法) 请去除辅助轴侧的异常原因
并列
并列并列
并列驱动
驱动驱动
驱动的原点
的原点的原点
的原点复
复复
复位
位位
位时标准
时标准时标准
时标准轴和辅助轴
轴和辅助轴轴和辅助轴
轴和辅助轴的偏离量超过容许幅
的偏离量超过容许幅的偏离量超过容许幅
的偏离量超过容许幅
度
度度
度
57
5757
57
并列
并列并列
并列驱动
驱动驱动
驱动偏离补
偏离补偏离补
偏离补
正容许幅度超出
正容许幅度超出正容许幅度超出
正容许幅度超出
(复位方法 1) 请调整到标准轴和辅助轴的机械偏离在允许
宽度以内
(复位方法 2) 请在并列驱动原点信号补正值(Pr.023C
023D)中设定正确的值
并
并并
并列
列列
列驱动
驱动驱动
驱动的同期模式中伺服
的同期模式中伺服的同期模式中伺服
的同期模式中伺服 ON
ONON
ON 时的误差修正时
时的误差修正时时的误差修正时
时的误差修正时 输入停止
输入停止输入停止
输入停止
指令
指令指令
指令
58
5858
58
并列
并列并列
并列驱动
驱动驱动
驱动同期对
同期对同期对
同期对
齐不正确
齐不正确齐不正确
齐不正确
(复位方法) 因同期对齐中断而处于原点复位未了状态
请
再次实行原点复位
不执行原点
不执行原点不执行原点
不执行原点复
复复
复位就进行自动
位就进行自动位就进行自动
位就进行自动运行
运行运行
运行 直线间隔补位
直线间隔补位直线间隔补位
直线间隔补位
90
9090
90
原点
原点原点
原点复
复复
复位
位位
位未完
未完未完
未完
(复位方法) 请实行原点复位
或请用参数将无原点变为有
效
没有通过
没有通过没有通过
没有通过 Z
ZZ
Z 相
相相
相
91
9191
91
Z
ZZ
Z 相未
相未相未
相未通过
通过通过
通过
(复位方法) 请将记号向+/-偏离的方向旋转 1 次以上后进
行原点复位
在于
在于在于
在于遮光板
遮光板遮光板
遮光板式原点
式原点式原点
式原点复
复复
复位
位位
位 遮光板
遮光板遮光板
遮光板有效
有效有效
有效后减速停止的位置不在
后减速停止的位置不在后减速停止的位置不在
后减速停止的位置不在
遮光板
遮光板遮光板
遮光板上
上上
上
92
9292
92
Dog is short
Dog is shortDog is short
Dog is short
(
((
(近点
近点近点
近点遮光板
遮光板遮光板
遮光板短
短短
短)
))
)
(复位方法) 请加长近点遮光板
或请减慢原点复位速度使
其停止在遮光板上
装置名称
装置名称装置名称
装置名称
贴片机
贴片机贴片机
贴片机
模块名称
模块名称模块名称
模块名称
第十七章
第十七章第十七章
第十七章
伺服警告
伺服警告伺服警告
伺服警告
页次
页次页次
页次
17-31
单元名称
单元名称单元名称
单元名称
修订
修订修订
修订
0509-001
型号名称
型号名称型号名称
型号名称
项
项项
项
目
目目
目
1.
1. 1.
1. 伺服警告的问题处理
伺服警告的问题处理伺服警告的问题处理
伺服警告的问题处理
GXH-1
警告
警告警告
警告
代码
代码代码
代码
伺服警告内容
伺服警告内容伺服警告内容
伺服警告内容
原因
原因原因
原因及
及及
及复
复复
复位
位位
位方法
方法方法
方法
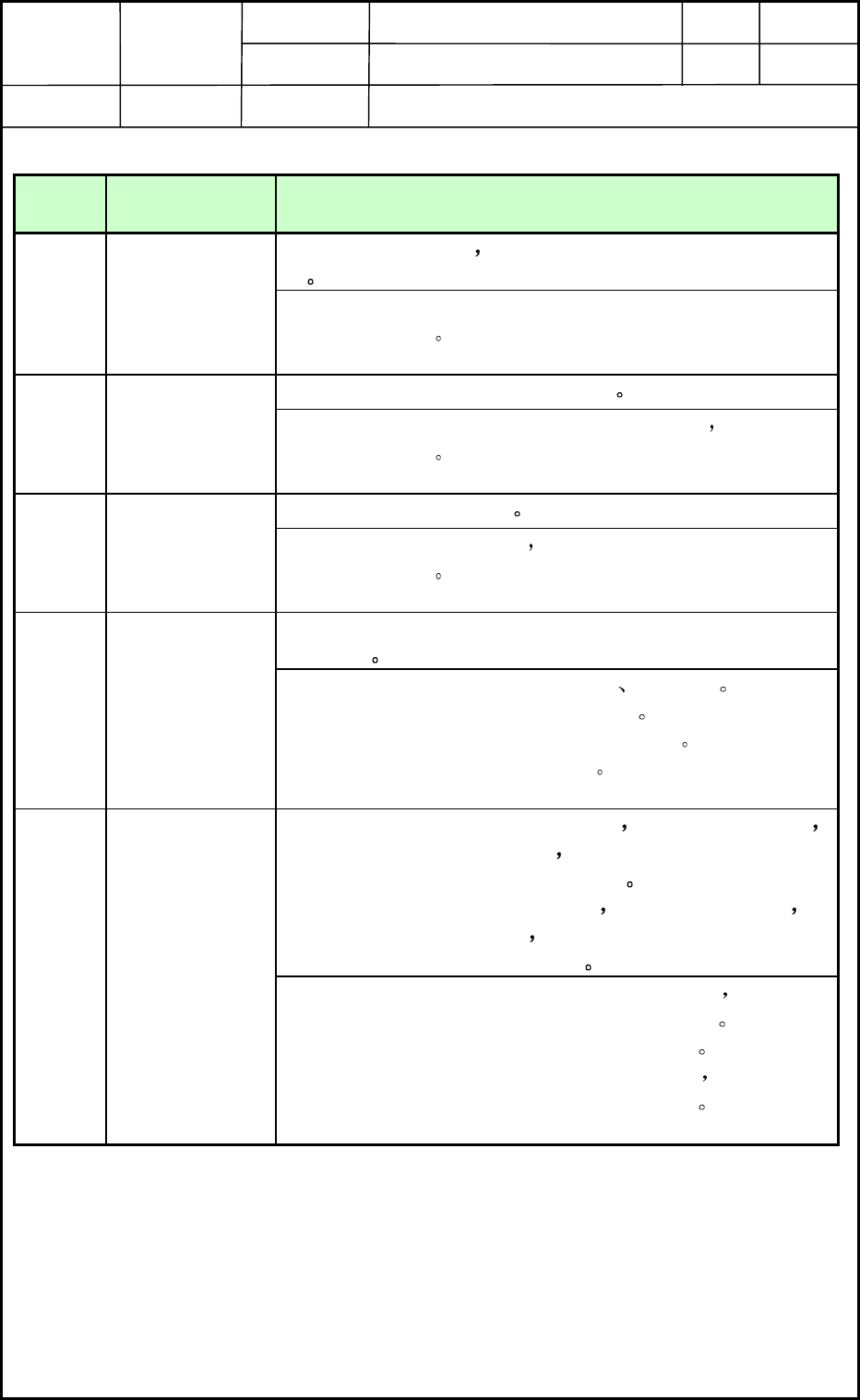
在于推入式原点
在于推入式原点在于推入式原点
在于推入式原点复
复复
复位
位位
位 原点
原点原点
原点复
复复
复位
位位
位方向和推入方向为逆反方
方向和推入方向为逆反方方向和推入方向为逆反方
方向和推入方向为逆反方
向
向向
向
94
9494
94
原点位置设定模
原点位置设定模原点位置设定模
原点位置设定模
式不正确
式不正确式不正确
式不正确
(复位方法) 请将原点复位方向设定为与推入方向相同的方
向
推入式原点
推入式原点推入式原点
推入式原点复
复复
复位时力矩
位时力矩位时力矩
位时力矩限制不能有效
限制不能有效限制不能有效
限制不能有效
95
9595
95
力矩限制不能有
力矩限制不能有力矩限制不能有
力矩限制不能有
效
效效
效
(复位方法) 请将进行推入的限制设为 ON 后
启动原点复
位
马达整定前进行原点设定
马达整定前进行原点设定马达整定前进行原点设定
马达整定前进行原点设定
96
9696
96
原点
原点原点
原点设定出错
设定出错设定出错
设定出错
(复位方法) 请调整伺服
使得停止在原点位置时迅速整
定
原点
原点原点
原点复
复复
复位
位位
位停止时即使经过
停止时即使经过停止时即使经过
停止时即使经过 1800ms
1800ms1800ms
1800ms 以上也没变为
以上也没变为以上也没变为
以上也没变为 in
inin
in
position
positionposition
position
97
9797
97
原点
原点原点
原点复
复复
复位
位位
位停止
停止停止
停止出
出出
出
错
错错
错
(复位方法 1) 请减小原点复位速度
潜移速度
(复位方法 2) 请调长原点复位时系数
(复位方法 3) 请将 in position 范围变广
请确认原点复
位时是否碰到机械
(1)
(1)(1)
(1)标尺原点信号检出式原点
标尺原点信号检出式原点标尺原点信号检出式原点
标尺原点信号检出式原点复
复复
复位时
位时位时
位时 对于
对于对于
对于原点
原点原点
原点复
复复
复位
位位
位动作
动作动作
动作
限制转换开关检出停止后
限制转换开关检出停止后限制转换开关检出停止后
限制转换开关检出停止后 为检出标尺原点信号而移动
为检出标尺原点信号而移动为检出标尺原点信号而移动
为检出标尺原点信号而移动
的移动量超过原点搜索限制设定值
的移动量超过原点搜索限制设定值的移动量超过原点搜索限制设定值
的移动量超过原点搜索限制设定值
(2)
(2)(2)
(2)限制转换开关兼用原点
限制转换开关兼用原点限制转换开关兼用原点
限制转换开关兼用原点复
复复
复位时
位时位时
位时
对于
对于对于
对于原点
原点原点
原点复
复复
复位
位位
位动作
动作动作
动作 限
限限
限
制转
制转制转
制转换开关检出停止后
换开关检出停止后换开关检出停止后
换开关检出停止后
为检出编码器
为检出编码器为检出编码器
为检出编码器 Z
ZZ
Z 相而移动的移
相而移动的移相而移动的移
相而移动的移
动量超过原点搜索限制设定值
动量超过原点搜索限制设定值动量超过原点搜索限制设定值
动量超过原点搜索限制设定值
98
9898
98
原点搜索限制
原点搜索限制原点搜索限制
原点搜索限制异
异异
异
常
常常
常
(复位方法 1) 标尺原点信号检出式原点复位时
请确认限
制转换开关的传感器信号的输入
请确认直
线标尺的标尺原点信号的输入
(复位方法 2) 限制转换开关兼用原点复位时
请确认限制
转换开关的传感器信号的输入