00193454-02.pdf - 第91页
사용자 매뉴얼 SIPLACE HS-60 3 기술 정보 소프트웨어 버전 SR.503.xx 2003 년 7 월 미국판 3.8 모듈 개요 - 실장 헤드 91 3.8.2 설명 – 12- 세그먼트 Collect&Place 헤드는 "collect & p lace" 원리를 이용하 며 이는 즉 한 픽업 주 기가 끝 나 면 진 공의 힘 을 이용해 노즐 로 컴포넌트를 들 어 올…
3 기술 정보 사용자 매뉴얼 SIPLACE HS-60
3.8 모듈 개요 - 실장 헤드 소프트웨어 버전 SR.503.xx 2003 년 7 월 미국판
90
3.8 모듈 개요 - 실장 헤드
3.8.1 표준 컴포넌트 비전 카메라를 갖춘 12 세그먼트 Collect&Place 헤드
3.8.1.1 구조
3
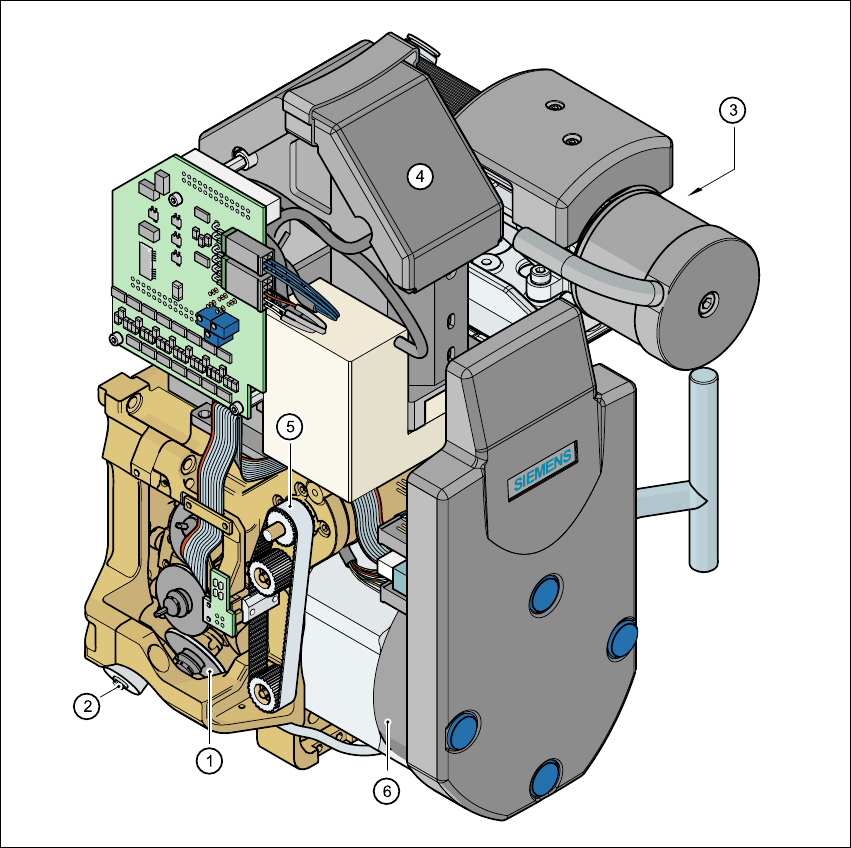
그림 3.8 - 1 12 세그먼트 Collect&Place 헤드의 구조
(1) 12 개의 슬리브가 있는 스타 (4) 컴포넌트 비전 모듈
(2) " 리젝트" 밸브 조정 드라이브 모터 (5) Z 축 드라이브
(3) 회전 스테이션 (6) 스타 모터
사용자 매뉴얼 SIPLACE HS-60 3 기술 정보
소프트웨어 버전 SR.503.xx 2003 년 7 월 미국판 3.8 모듈 개요 - 실장 헤드
91
3.8.2 설명
– 12- 세그먼트 Collect&Place 헤드는 "collect & place" 원리를 이용하며 이는 즉 한 픽업 주
기가 끝나면 진공의 힘을 이용해 노즐로 컴포넌트를 들어올린 후 압착 공기를 이용하여 PCB
에 부드럽고 정확하게 실장하는 것을 말합니다 . 또한 노즐 안의 진공은 컴포넌트가 정확히 픽
업되고 설치되었는지 확인하기 위해 여러 번 검사됩니다 .
– Z 축의 " 적응적" 센서 정지 모드는 컴포넌트가 안착되었을 때 PCB 표면에 존재하는 불균일성
을 보상합니다 .
– 모든 컴포넌트는 동일한 주기로 삽입됩니다 . 컴포넌트는 삽입되기 전에 광전자 비전 시스템
으로 측정됩니다 .
– 컴포넌트 비전 카메라 모듈은 현
재 컴포넌트의 이미지를 생성합니다 .
– 또한 컴포넌트의 정확한 위치도 측정됩니다 .
– 식별을 위해 현재 컴포넌트의 패키지 형식과 프로그램된 패키지 형식이 비교됩니다 . 식별되
지 않은 컴포넌트는 모두 리젝트됩니다 .
– 회전 스테이션은 필요한 실장 위치로 컴포넌트를 회전시킵니다 .
– 결함이 있는 컴포넌트는 리젝트되고 복구 작업 중에 다시 픽업됩니다 .
3.8.3 기술 정보
3
컴포넌트 범위 0201 부터 PLCC44 까지(BGA, μ BGA, 플
립 칩 , TSOP, QFP PLCC, SO ~ SO32,
DRAM 포함 )
컴포넌트 사양
최대 높이
최소 리드 피치
최소 범프 피치
최소 볼 / 범프 지름
최소 크기
최대 크기
최대 무게
6mm
0.5mm
0.35mm
0.2mm
0.6mm x 0.3mm
18.7mm x 18.7mm
2g
프로그램 가능 안착력 2.4~5.0N
노즐 유형 9 xx
최대 실장 속도 15,000comp/h
각 정밀도 ± 0.7 ˚ /4 시그마
표준 비전 모듈을 통한 실장 정밀도 ± 80 μ m/4 시그마
3 기술 정보 사용자 매뉴얼 SIPLACE HS-60
3.9 모듈 개요 - 비전 모듈 소프트웨어 버전 SR.503.xx 2003 년 7 월 미국판
92
3.9 모듈 개요 - 비전 모듈
각각의 실장 시스템에는 다음이 포함되어 있습니다 .
– 실장 헤드에 장착된 컴포넌트 비전 모듈 4 개
– X 축 갠트리 하단의 PCB 카메라 4 개
비전 분석 장치는 실장 시스템의 제어 장치 안에 위치합니다 . 컴포넌트 비전 모듈은 다음을 측정
하기 위해 사용됩니다 .
– 컴포넌트의 노즐 안 정확한 위치
– 패키지 폼의 외형
PCB 비전 모듈은 다음을 측정하기 위해 PCB 위의 피듀셜을 사용합니다 .
– PCB 의 위치
– 그 회전 각
– PCB 비틀림
또한 PCB 비전 모듈은 컴포넌트의 정확한 픽업 위치를 결정하기 위해 피더 모듈 위의 피듀셜을
사용합니다 . 이것은 소형 컴포넌트에 대해 매우 중요합니다 .